BÀI T P TRANG B ĐI N(25 lý thuy t) Ậ Ị Ệ ế
N i dung: 25 câu lý thuy t và 4 bài t p trang b đi nộ ế ậ ị ệ
PH N LÝ THUY TẦ Ế :
tr l iả ờ :
(*): c u trúc c a h truy n đ ng đi n g m :ấ ủ ệ ề ộ ệ ồ
I- BBĐ: b bi n đ i dùng độ ế ổ ể :
+) bi n đ i lo i dòng đi n (dòng xoay chi u thành m t chi u or ng c l i) ế ổ ạ ệ ề ộ ề ượ ạ
+) bi n đ i lo i ngu n (ngu n áp thành ngu n dòng ho c ng c l i) ế ổ ạ ồ ồ ồ ặ ượ ạ
+) bi n đ i m c đi n áp (dòng đi n), bi n đ i s pha, bi n đ i t n s ….ế ổ ứ ệ ệ ế ổ ố ế ổ ầ ố
Phân lo iạ:
G m có máy phát đi n, h máy phát-đ ng c (h F-Đ), các ch nh l u không đi uồ ệ ệ ộ ơ ệ ỉ ư ề
khi n và có đi u khi n, b bi n t n…..ể ề ể ộ ế ầ
II-Đ: đ ng c đi n dùng độ ơ ệ ể:
+) bi n đ i c năng thành đi n năng (khi hãm đi n) ế ổ ơ ệ ệ
+) bi n đ i đi n năng thành c năngế ổ ệ ơ
Phân lo i:ạ
G m có đ ng c xoay chi u KĐB 3 pha roto dây qu n hay l ng sóc, đ ng c đi nồ ộ ơ ề ấ ồ ộ ơ ệ
1 chi u kích t song song, n i ti p hay kích t b ng nam châm vĩnh c u, đ ng cề ừ ố ế ừ ằ ử ộ ơ
xoay chi u đ ng b ….ề ồ ộ
III-TL: khâu truy n l c dùng đề ự ể:
+) truy n l c t đ ng c đi n t i c c u s n xu tề ự ừ ộ ơ ệ ớ ơ ấ ả ấ
+) bi n đ i d ng chuy n đ ng (quay t nh ti n or l c)ế ổ ạ ể ộ ị ế ắ
+) làm phù h p v t c đ , momen, l cợ ề ố ộ ự
Phân lo iạ:
Bao g m bánh răng, thanh răng, tr c vít, xích, đai truy n, các b ly h p c ho cồ ụ ề ộ ơ ơ ặ
đi n t ….ệ ừ
IV-CCSX: c c u s n xu t dùng đơ ấ ả ấ ể:
+) th c hi n các thao tác và s n xu t công ngh .ự ệ ả ấ ệ
1
Câu 1: nêu c u trúc và phân lo i h truy n đ ng đi nấ ạ ệ ề ộ ệ
Phân lo i:ạ
G m gia công chi ti t, nâng-h t i tr ng, d ch chuy n….ồ ế ạ ả ọ ị ể
V-ĐK: kh i đi u khi n dùng đ :ố ề ể ể
+) đi u khi n BBĐ ề ể
+) đi u khi n Đề ể
+) đi u khi n c c u truy n l cề ể ơ ấ ề ự
Phân lo i:ạ
G m các c c u đo l ng, các b đi u ch nh tham s và công ngh , các khí c vàồ ơ ấ ườ ộ ề ỉ ố ệ ụ
thi t b đi u khi n đóng c t có ti p đi m ( r -le or công t c), lo i không có ti pế ị ề ể ắ ế ể ơ ắ ạ ế
đi m (đi n t , bán d n), PLC, b vi x lí….ể ệ ử ẫ ộ ử
(*) phân lo i c a h truy n đ ng đi n:ạ ủ ệ ề ộ ệ
Theo đ c đi m c a đ ng c đi n (truy n đ ng đi n 1 chi u, KĐB, ĐB)ặ ể ủ ộ ơ ệ ề ộ ệ ề
Theo tính năng đi u ch nh( truy n đ ng có đi u ch nh và không đi u ch nh)ề ỉ ề ộ ề ỉ ề ỉ
Theo thi t b bi n đ i (F-Đ)ế ị ế ổ
Ngoài ra còn có 1 s phân lo i khác nh : theo đ o chi u và không đ o chi u,ố ạ ư ả ề ả ề
truy n đ ng quay và th ng….ề ộ ẳ
tr l i:ả ờ
tr ng thái đ ng cở ạ ộ ơ
tr ng thái máy phátở ạ
(*) tr ng đ ng cở ạ ộ ơ:nlđ c truy n t đ ng c đ n máy s n xu t và đ c tiêuượ ề ừ ộ ơ ế ả ấ ượ
th t i c c u công tác c a máy. Tr ng h p này công su t đi n đ a vào đ ngụ ạ ơ ấ ủ ườ ợ ấ ệ ư ộ
c ơ
dien
P
>0, công su t do đ ng c sinh ra ấ ộ ơ
co
P
=M.
ω
>0, momen c a đ ng c cùngủ ộ ơ
chi u v i t c đ . Tr ng thái đ ng c s t ng ng v i các đi m n m trong gócề ớ ố ộ ạ ộ ơ ẽ ươ ứ ớ ể ằ
ph n t th nh t và góc ph n t th 3 c a m t ph ng [M, ầ ư ứ ấ ầ ư ứ ủ ặ ẳ
ω
]
(*) tr ng thái máy phátở ạ : năng l ng đ c truy n t phía máy s n xu t vượ ượ ề ừ ả ấ ề
đ ng c . Khi h truy n đ ng làm vi c, trong m t đi u ki n nào đó c c u côngộ ơ ệ ề ộ ệ ộ ề ệ ơ ấ
tác c a máy s n xu t có th t o ra c năng do đ ng năng ho c th năng tích lũyủ ả ấ ể ạ ơ ộ ặ ế
trong h đ l n, c năng đó đ c truy n v tr c đ ng c , đ ng c ti p nh nệ ủ ớ ơ ượ ề ề ụ ộ ơ ộ ơ ế ậ
năng l ng này và làm vi c nh máy phát đi n. ng c v i tr ng h p trên côngượ ệ ư ệ ượ ớ ườ ợ
2
Câu 7: câu 2: nêu các tr ng thái làm vi c c a truy n đ ng đi nạ ệ ủ ề ộ ệ
su t c c a đ ng s là Pc <0, nghĩa là M.ấ ơ ủ ộ ẽ ơ
ω
<0, momen đ ng c ng c chi u v iộ ơ ượ ề ớ
t c đ . Còn công su t do máy s n xu t t o ra s là Pc=Mc.ố ộ ấ ả ấ ạ ẽ
ω
>0.
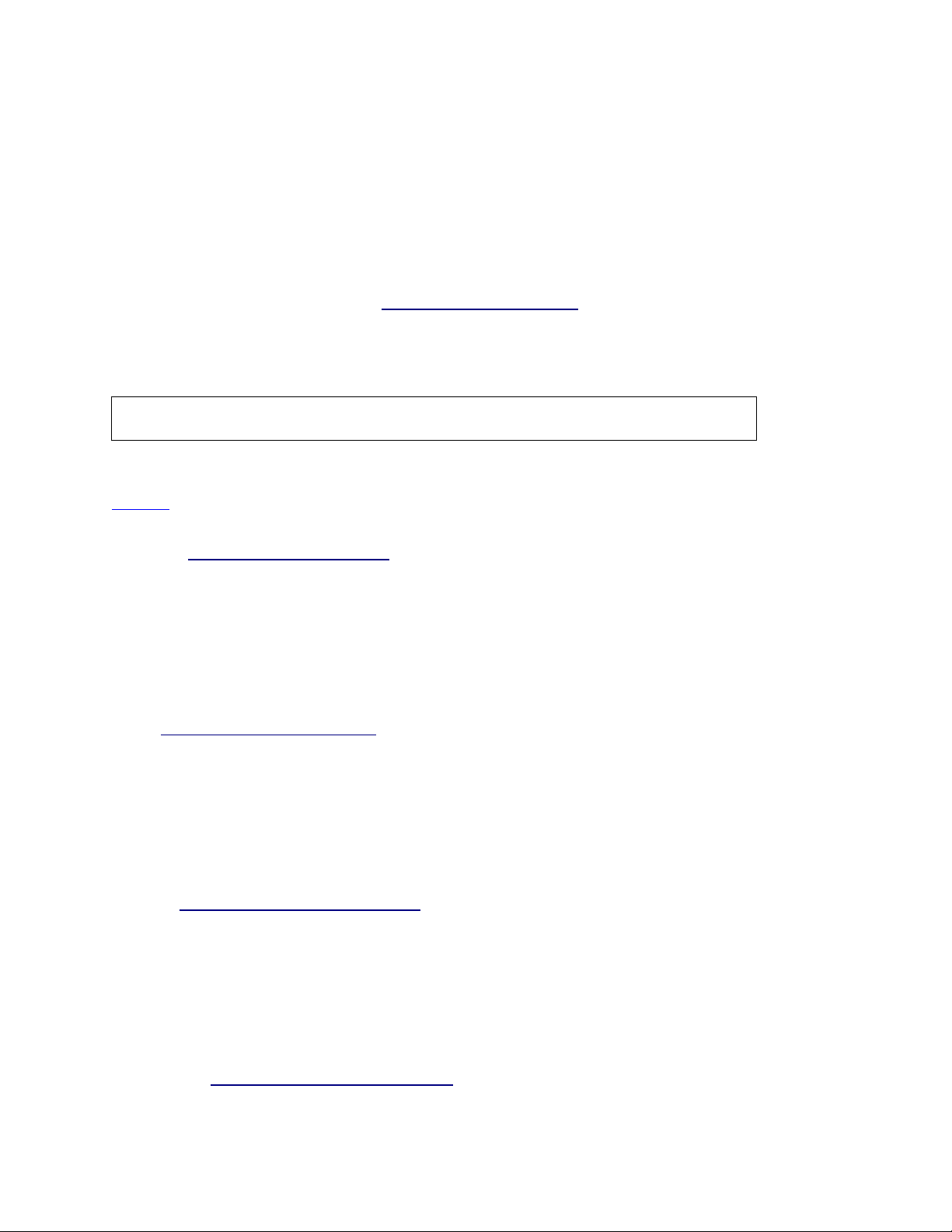
Bi u di n các tr ng thái làm vi c trên m t ph ng [M,ể ễ ạ ệ ặ ẳ
ω
]:
II M(
ω
)
I G
tr ng thái máy phát ạ Mc(
ω
) tr ng thái đ ng cạ ộ ơ
M
ω
<0; Mc.
ω
>0 M.
ω
<0; Mc.
ω
>0
Tr ng thái đ ng c III Mc(ạ ộ ơ
ω
) M(
ω
) Tr ng thái máy phátạ
M.
ω
>0;M.
ω
<0 M.
ω
<0; Mc.
ω
>0
IV
tr l i:ả ờ
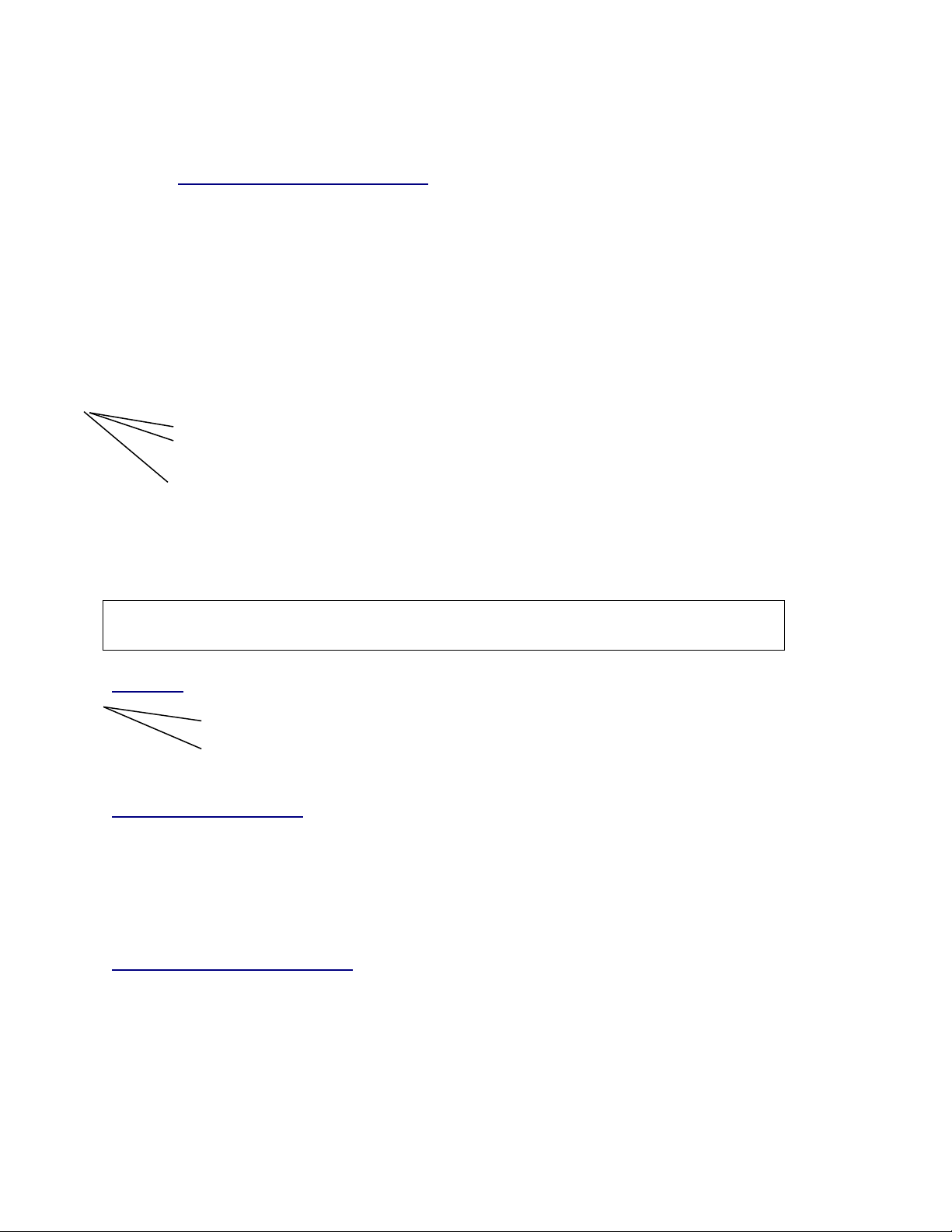
khi ngu n đi n m t chi u có công su t vô cùng l n, đi n tr trong c a ngu n coiồ ệ ộ ề ấ ớ ệ ở ủ ồ
nh b ng không thì đi n áp ngu n s là không đ i, không ph thu c dòng đi nư ằ ệ ồ ẽ ổ ụ ộ ệ
ch y trong ph n ng đ ng c . Khi đó đ ng c kích t song song cũng đ c coiạ ầ ứ ộ ơ ộ ơ ừ ượ
nh kích t đ c l p. nên ta xét 2 là 1:ư ừ ộ ậ
3
I II
III IV
câu 3: ph ng trình đ c tính c và các nh h ng thông sươ ặ ơ ả ưở ố
đi n đ i v i đ c tính c đi n 1 chi u kích t đ c l p và songệ ố ớ ặ ơ ệ ề ừ ộ ậ
song.
Uư
Rư
Rfư
KT
I
R
fk
KT
U
T s đ n i dây kích t đ c l p trên ta có:ừ ơ ồ ố ừ ộ ậ
U = E+(R +Rf ).I (*)ư ư ư ư
V i:ớ
U là đi n áp ngu n đ t vào ph n ngư ệ ồ ặ ầ ứ
R = r +rcf +rcb+rctư ư
Rf là đi n tr ph trong m ch ph n ng;ư ệ ở ụ ạ ả ứ
I là dòng đi n m ch ph n ng.ư ệ ạ ầ ứ
E-là s c đi n đ ng c a ph n ng đ ng c (E= K.ứ ệ ộ ủ ầ ứ ộ ơ
ωφ
.
) thay vào (*) ta có:
'
''
'
u
fuu
uI
K
RR
K
U
φφ
ω
+
−=
(*)
Bi u th c(*) trên là đ c tính c đi n c a đ ng c .ể ứ ặ ơ ệ ủ ộ ơ
Có th bi u di n đ c tính c d i d ng: ể ể ễ ặ ơ ướ ạ
ωωω
∆−= 0
V i ớ
φ
ω
K
Uu'
0=
g i là t c không t i lý t ng.ọ ố ả ưở
'
''
u
fuu I
K
RR
φ
ω
+
=∆
g i là đ s t t c đ .ọ ộ ụ ố ộ
Có th bi u di n ph ng trình đ c tính c d i d ng hàm b c nh t Y=Ax+Bể ể ễ ươ ặ ơ ướ ạ ậ ấ
Nh hình sau:ư
4
E
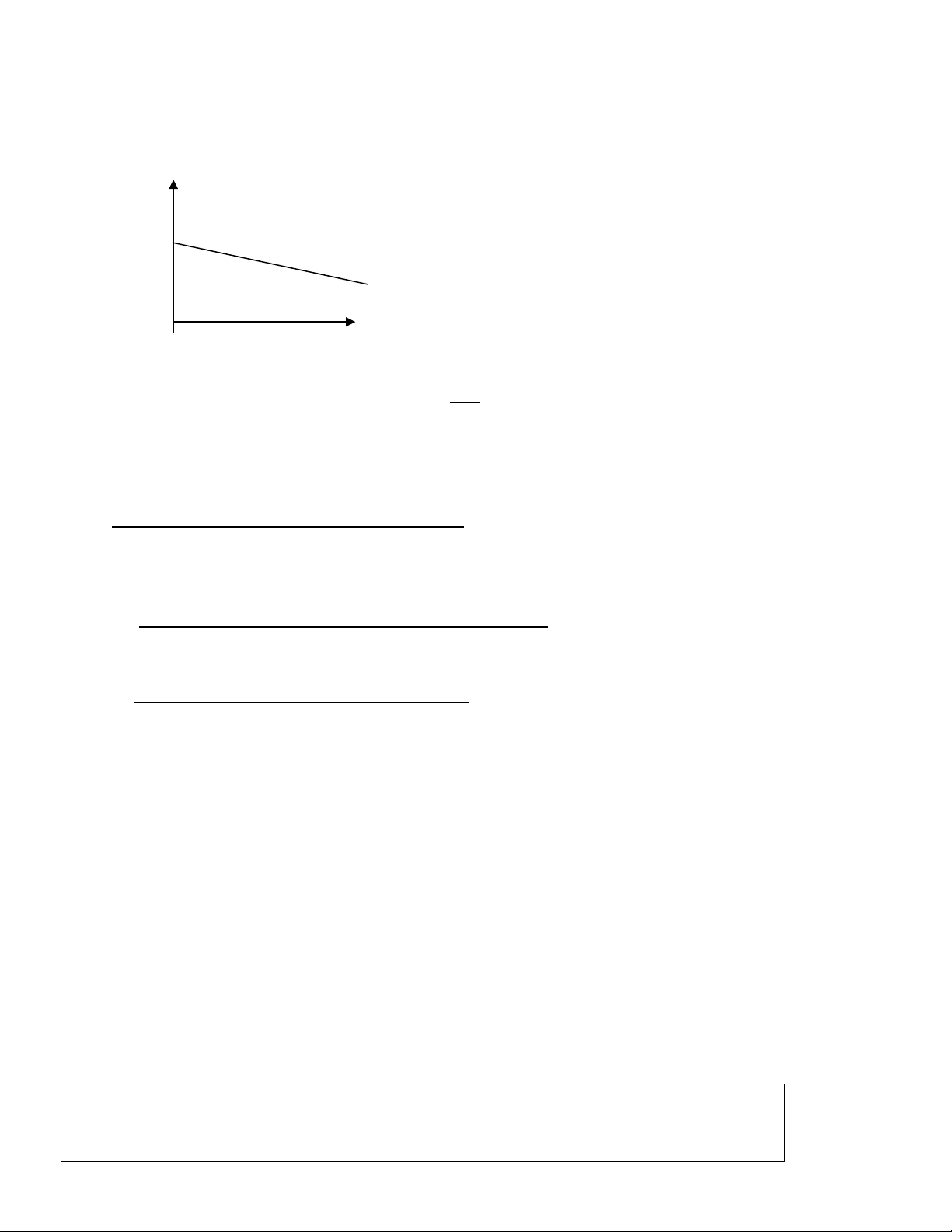
ω
φ
ω
K
Uu'
0=
M
0
T đó ta có th suy ra M=Mừ ể
nm
=
'u
đm
đm R
U
K
φ
=K.
nmđm I.
φ
(**)
(*) nh h ng c a các thông s đi n t i đ c tính c :ả ưở ủ ố ệ ớ ặ ơ
Ph ng trình đ c tính c ươ ặ ơ
)(Mf=
ω
nh h ng b i các thông s :ả ưở ở ố
1. tr ng h p thay đ i đi n áp ph n ng.ườ ợ ổ ệ ầ ứ
vì đi n áp ph n ng không th v t quá giá tr đ nh m c nên ta ch có th gi mệ ầ ứ ể ượ ị ị ứ ỉ ể ả
U bi n đ i, Rp= const, ư ế ổ
φ
=const
2. tr ng h p thay đ i đi n tr m ch ph n ngườ ợ ổ ệ ở ạ ả ứ
Vì đi n tr t ng m ch ph n ng là : Rệ ở ổ ạ ả ứ ư
Σ
= R + Rf nên ch tăng v phía Rfư ư ỉ ề ư
U = const, R =var, ư ư
φ
=const;
3. tr ng h p thay đ i t thông kích t ườ ợ ổ ừ ừ
U =const, Rf =const, ư ư
φ
=var;
Đ thay đ i t thông ể ổ ừ
φ
ta ph i thay đ i dòng đi n kích t nh bi n tr Rkt m c ả ổ ệ ừ ờ ế ở ắ ở
m ch kích t đ ng c . Vì ch có th tăng Rkt nên t thông ch có th gi m v phíaạ ừ ộ ơ ỉ ể ừ ỉ ể ả ề
t thông đ nh m c.ừ ị ứ
5
câu 4: Nêu ph ng trình đ c tính c và nh h ng thông s đi n v iươ ặ ơ ả ưở ố ệ ớ
đ c tính c p c a đ ng c m t chi u kích t n i ti pặ ơ ủ ộ ơ ộ ề ừ ố ế
![Mạch khuếch đại ghép tầng điện tử cơ bản: Bài tập lớn [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250612/minhquan0690/135x160/49651768206643.jpg)



![Bài tập Điện tử công suất [có lời giải]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20150328/ducxt1995/135x160/1749189_169.jpg)



















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)