4
ĐẠI HỌC ĐÀ NẴNG
TRƯỜNG ĐẠI HỌC BÁCH KHOA
KHOA ĐIỆN
BÁO CÁO CUỐI KÌ
ĐIỀU KHIỂN TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN TRONG
CÔNG NGHIỆP
Giảng viên hướng dẫn: TS. NGUYỄN KHÁNH QUANG
Sinh viên thực hiện: LÊ NGỌC CHƯƠNG
NGUYỄN PHI HÙNG
LÊ VĂN THÁI
LÊ NGỌC THÀNH
TRẦN VĂN VINH
Nhóm HP / Lớp: 20N33
Nhóm: 6
Ngành: Kỹ Thuật Điểu Khiển Và Tự Động Hóa

1
MỤC LỤC
Mục lục .......................................................................................................................... 1
MỤC LỤC HÌNH ẢNH ................................................................................................ 2
CHƯƠNG 1. TỔNG QUAN VỀ HỆ THỐNG ..................................................... 3
1.1 Giới thiệu. ....................................................................................................... 3
1.1.1 Giới thiệu về động cơ điện. ......................................................................... 3
1.1.2 Tổng quan về động cơ đồng bộ. ................................................................. 3
1.1.3 Phương pháp điều khiển động cơ. ............................................................. 4
1.1.4 Phương pháp điều khiển tựa theo từ thông roto. ..................................... 4
1.1.5 Yêu cầu đề tài. ............................................................................................. 5
CHƯƠNG 2. TỔNG HỢP PHẦN ĐIỀU KHIỂN CỦA HỆ THỐNG ............... 6
2.1 Cấu trúc bộ điều khiển. ................................................................................. 6
2.2 Nguyên lí hoạt động ....................................................................................... 7
CHƯƠNG 3. THIẾT KẾ, TRIỂN KHAI TRÊN MATLAB-SIMULINK VÀ
MÔ PHỎNG KIỂM TRA KẾT QUẢ ......................................................................... 9
3.1 Thiết kế hệ thống trên matlab simulink ...................................................... 9
3.2 Phương trình quỹ đạo ................................................................................. 10
3.3 Chương trình vẽ hình tròn trên xy ............................................................. 11
3.4 Chương trình vẽ hình cửa sổ trên xy ......................................................... 12
3.5 Chương trình viết kí tự trên xy .................................................................. 14
3.6 Chương trình vẽ hình xoắn ốc trên xyz ..................................................... 14
3.7 Chương trình vẽ hình lá cờ trên xyz .......................................................... 15
3.8 Chương trình vẽ chữ hình khối trên xyz ................................................... 17
KẾT LUẬN CHUNG ................................................................................................. 20
PHỤ LỤC .................................................................................................................... 21

4
MỤC LỤC HÌNH ẢNH
Hình 1.1: Phương pháp điều khiển gián tiếp .................................................................. 4
Hình 1.2: Phương pháp điều khiển trực tiếp……………………………………………4
Hình 2.1: Cấu trúc bộ điều khiển .................................................................................... 6
Hình 2.2: Sơ đồ 3 mạch vòng điều khiển PMSM ........................................................... 7
Hình 3.1: Hệ thống điều khiển ba động cơ mô phỏng các trục x, y, z ........................... 9
Hình 3.2: Kết quả mô phỏng giữa giá trị đặt và giá trị đầu ra thực tế .......................... 11
Hình 3.3: Đáp ứng vị trí của trục x ............................................................................... 11
Hình 3.4: Đáp ứng vị trí của trục y ............................................................................... 12
Hình 3.5: Kết quả mô phỏng giữa giá trị đặt và giá trị đầu ra thực tế .......................... 12
Hình 3.6: Đáp ứng vị trí của trục x ............................................................................... 13
Hình 3.7: Đáp ứng vị trí của trục y ............................................................................... 13
Hình 3.8: Kết quả mô phỏng giữa giá trị đặt và giá trị đầu ra thực tế .......................... 14
Hình 3.9: Kết quả mô phỏng giữa giá trị đặt và giá trị đầu ra thực tế .......................... 14
Hình 3.10: Kết quả mô phỏng giữa giá trị đặt và giá trị đầu ra thực tế ........................ 15
Hình 3.11: Kết quả mô phỏng giữa giá trị đặt và giá trị đầu ra thực tế khi chiếu trên trục
xy cho z xấp xỉ 0 ........................................................................................................... 15
Hình 3.12: Đáp ứng vị trí của trục x ............................................................................. 16
Hình 3.13: Đáp ứng vị trí của trục y ............................................................................. 16
Hình 3.14: Đáp ứng vị trí của trục z ............................................................................. 17
Hình 3.15: Kết quả mô phỏng giữa giá trị đặt và giá trị đầu ra thực tế ........................ 17
Hình 3.16: Đáp ứng vị trí của trục x ............................................................................. 18
Hình 3.17: Đáp ứng vị trí của trục y ............................................................................. 18
Hình 3.18: Đáp ứng vị trí của trục z ............................................................................. 19

3
CHƯƠNG 1. TỔNG QUAN VỀ HỆ THỐNG
1.1 Giới thiệu.
1.1.1 Giới thiệu về động cơ điện.
Loài người xa xưa đã biết sử dụng các cơ cấu đơn giản như cáp tời, trục quay hay
các guồng, ròng rọc, các công cụ này chuyển hóa các dạng năng lượng của con người
hoặc thiên nhiên thành các dạng động năng khác nhau phục vụ đời sống. Chúng được
sử dụng trong các cần trục trên các tàu thuyền trong thời Hy Lạp cổ đại, và trong các
hầm mỏ trong thời La Mã cổ đại. Các tàu chiến trước đây đã sử dụng năng lượng nhân
tạo thông qua các động cơ đơn giản dạng đòn bẩy để tạo ra động năng có thể tự chèo.
Chúng được sử dụng trong các cần trục trên các tàu thuyền trong thời Hy Lạp cổ
đại, và trong các hầm mỏ trong thời La Mã cổ đại. Các nhà văn của thời đó, bao gồm
Vitruvius, Frontinus và Pliny the Elder, coi những động cơ này là phổ biến, vì vậy phát
minh của chúng có thể còn cổ xưa hơn nữa. Vào thế kỷ 1 sau Công nguyên, gia súc và
ngựa đã được sử dụng trong các nhà máy, lái những cỗ máy tương tự trước đó do con
người kéo ở các thời kỳ trước đó.
Cùng với sự phát triển của khoa học kỹ thuật, động cơ ngày càng có công suất lớn
hơn và sử dụng các loại nhiên liệu khác nhau thay cho sức người. Đỉnh điểm là vào
cuộc cách mạng công nghiệp lần thứ nhất, với sự ra đời của động cơ hơi nước. Tiếp sau
đó là sự ra đời của các động cơ đốt trong. Hiện nay, động cơ điện đang dần thay thế các
động cơ đốt trong từ thiết bị trong nhà đến phương tiện giao thông, máy móc cơ khí vì
sự tiện dụng, giảm đáng kể tiếng ồn, hao phí năng lượng và bảo vệ môi trường.
1.1.2 Tổng quan về động cơ đồng bộ.
Động cơ đồng bộ ba pha, trước đây thường dùng cho loại truyền động không điều
chỉnh tốc độ, công suất lớn hàng trăm kW đến hàng MW ( truyền động cho các máy
nén khí, quạt gió, bơm nước, máy nghiền v.v…).
Ngày nay do sự phát triển mạnh mẽ của công nghiệp điện tử và công nghệ vật
liệu, động cơ đồng bộ được nghiên cứu ứng dụng nhiều trong công nghiệp, ở mọi loại
dải công suất từ vài trăm W ( truyền động cho cơ cấuăn dao máy cắt gọt kim loại, cơ
cấu chuyển động của tay máy, người máy), đến hàng MW ( cho các truyềnđộng kéo tàu
tốc độ cao TGV, máy nghiền, máy cán v.v…).
Động cơ đồng bộ thường chia thành hai loại: động cơ đồng bộ rotor dây quấn
(WRSM) và động cơ đồng bộ nam châm vĩnh cửu (PMSM). Ở đề tài này, chúng em sử
dụng động cơ đồng bộ kích từ bằng nam châm vĩnh cửu (PMSM).
4
1.1.3 Phương pháp điều khiển động cơ.
Các phương pháp điều khiển động cơ bao gồm:
▪ Điều khiển vô hướng (Scalar Control)
▪ Điều khiển vector:
o Điều khiển theo phương pháp tựa theo từ thông roto (FOC)
o Điều khiển trực tiếp mômen (DTC)
o Điều khiển trực tiếp từ thông (DFC)
▪ Điều khiển không cần đo tốc độ
▪ Điều khiển phi tuyến, điều khiển mạng nơron,…
Trong đó, hai phương pháp được áp dụng nhiều trong thực tiễn là: phương pháp
điều khiển tựa theo từ trường và điều khiển trực tiếp mômen. Chúng em sử dụng phương
pháp điều khiển tựa theo từ trường (FOC) để điều khiển động cơ PMSM.
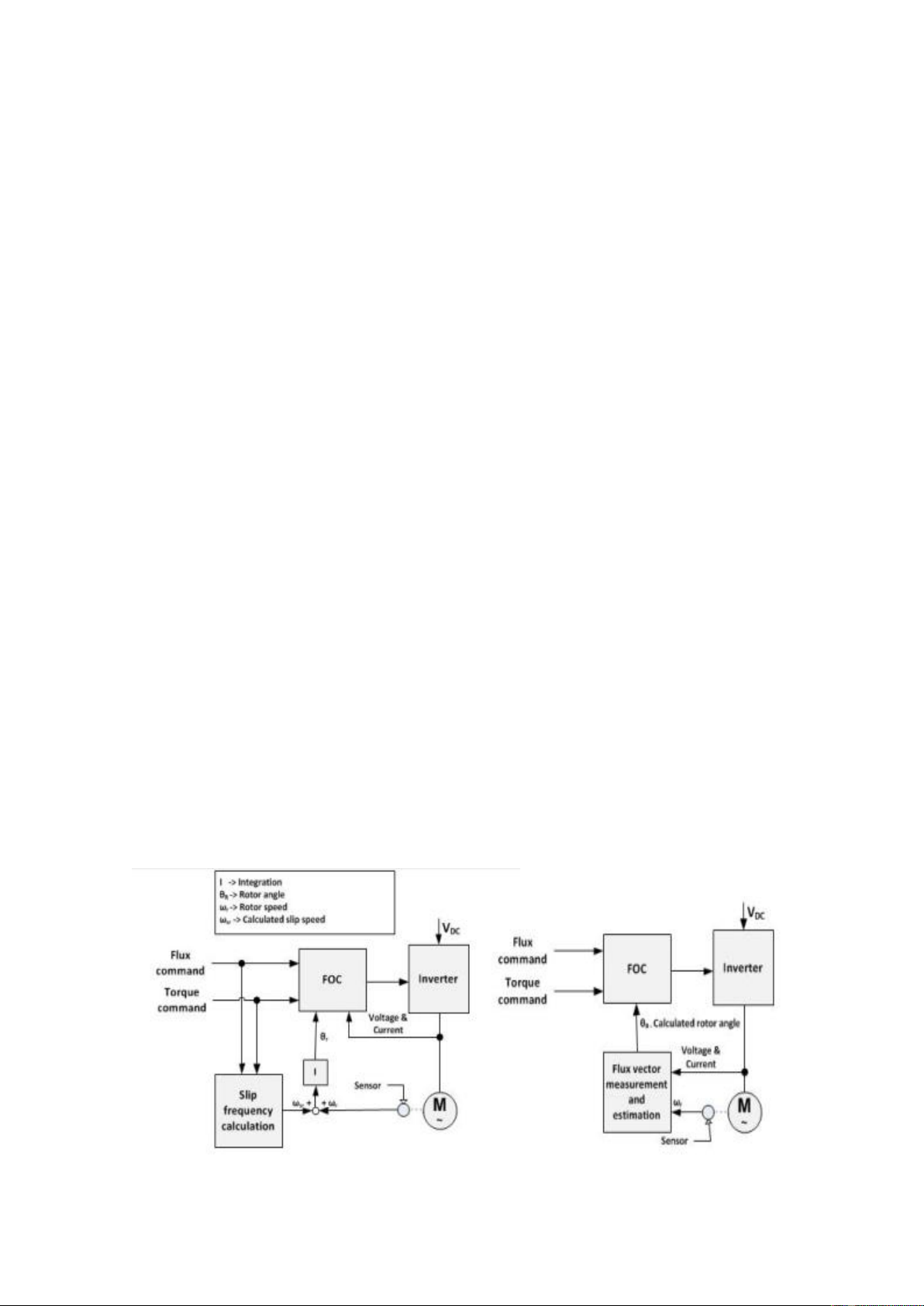
1.1.4 Phương pháp điều khiển tựa theo từ thông roto.
Phương pháp điều khiển FOC (Field Oriented Control) là phương pháp điều khiển
tựa theo từ thông rotor, được sử dụng rất phổ biến hiện nay. Với nguyên lý tạo ra một
công cụ cho phép nhìn nhận động cơ PMSM có cùng bản chất vật lí như động cơ một
chiều kích từ độc lập.
Nguyên tắc phương pháp này là tách các thành phần tạo ra mômen và từ trường
từ ba pha dòng điện stator sao cho có thể điều khiển độc lập hai thành phần mômen và
từ trường giống như động cơ điện một chiều.
Thường chia thành hai loại phổ biến: điều khiển gián tiếp và điều khiển trực tiếp.
Hai loại trục từ thông: tựa theo từ thông rotor (rotor flux orientation) và tựa theo
từ thông stator (stator flux orientation).
Hình 1.1: Phương pháp điều khiển gián tiếp Hình 1.2: Phương pháp điều khiển trực tiếp