BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP. HỒ CHÍ MINH
KHOA ĐIỆN – ĐIỆN TỬ
BÁO CÁO MÔN
THỰC TẬP ĐIỀU KHIỂN TỰ ĐỘNG
GVHD: THS Nguyễn Phong Lưu
Mã môn học: PACS321446
Sinh viên thực hiện:
Thân Hoàng Thái Bảo 23151053

Mục Lục
Bài số 4: Ứng dụng Simulink trong mô phỏng và đánh giá chất lượng của hệ
thống...................................................................................................................
3.3 Yêu cầu thực hiện:......................................................................................................
3.4 Câu hỏi mở.................................................................................................................

4.3 Yêu cầu thực hiện:
4.3.1 Khảo sát mô hình điều khiển nhiệt độ
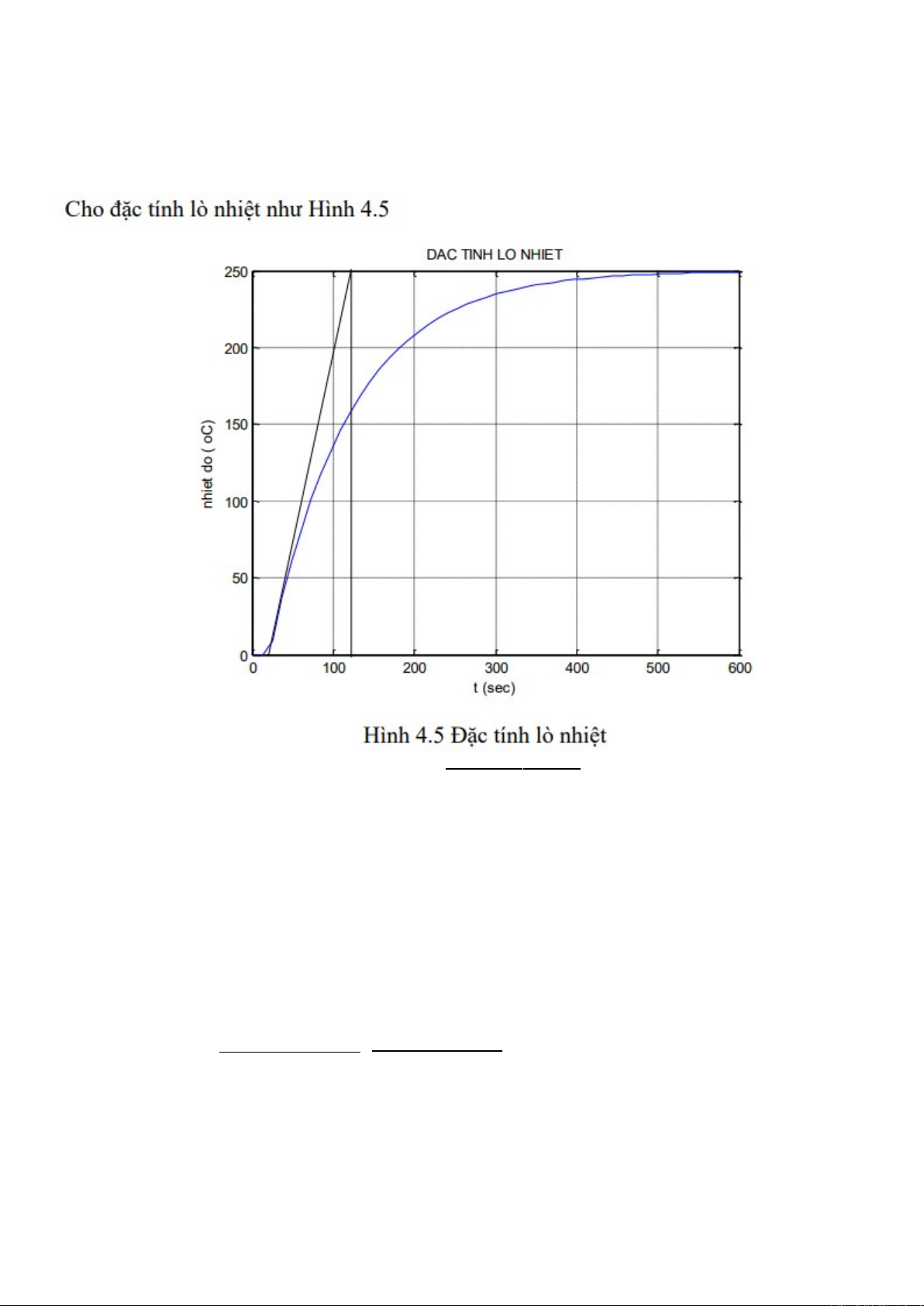
a.Hãy xác định hàm truyền gần đúng của lò nhiệt
theo sách Lý thuyết Điều khiển tự động (tác giả Nguyễn Thị Phương Hà-
Huỳnh Thái Hoàng) trang 209 :
G(s) =
K
(1 + T1s) (1 + T2s)
Từ đồ thị đặc tính lò nhiệt hình 4.5 ta có:
Điểm uốn: (10;25)
Thời gian trễ:T1 = 20(s)
Hằng số thời gian lò: T2 =100(s)
Hệ số: k=250
250 250
G(s)= (20s+1)(100 s+ 1) = 2000 s2+120 s+1
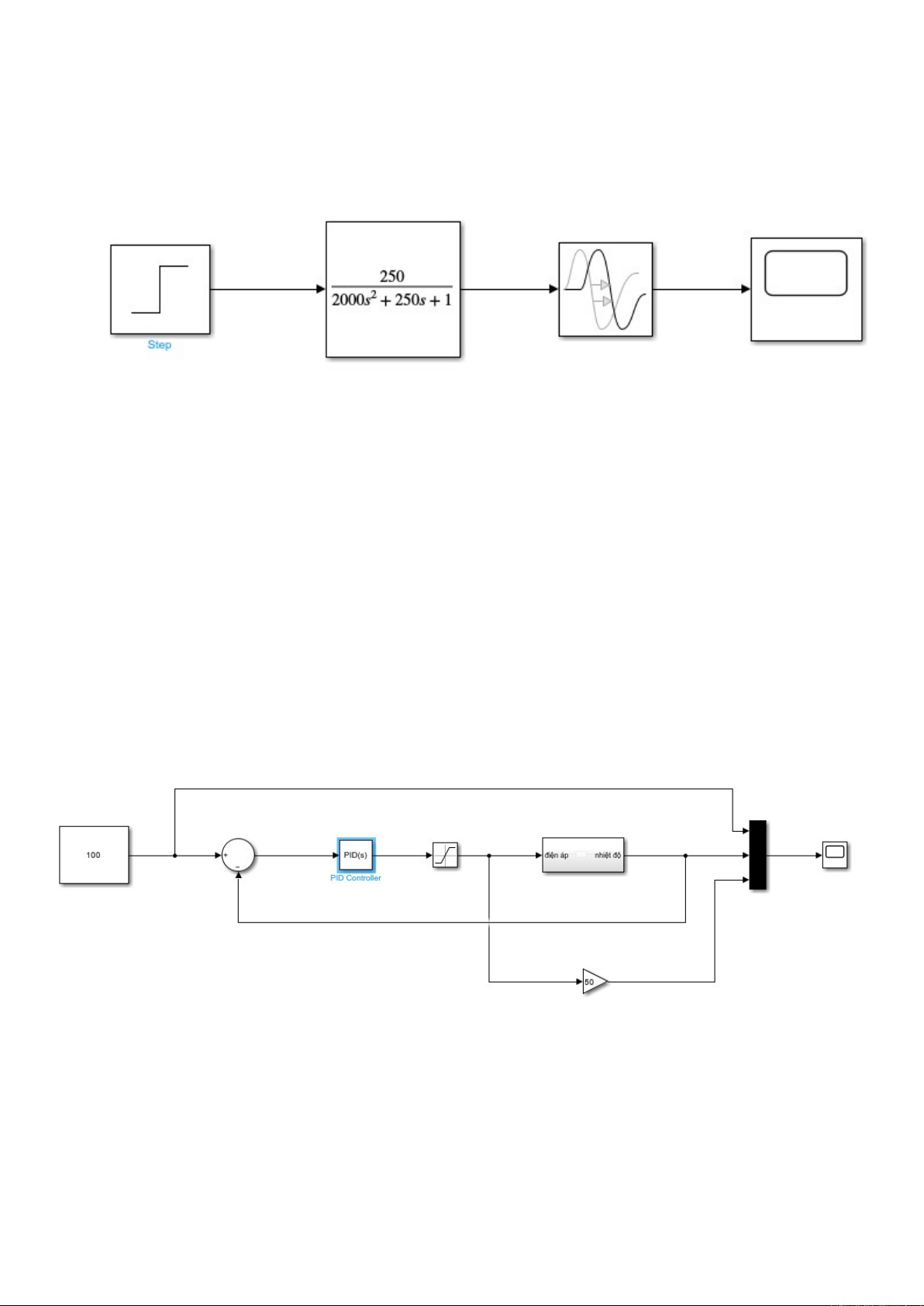
b. Dùng Simulink xây dựng mô hình điều khiển vòng hở lò nhiệt
4.1. Điều khiển vòng hở lò nhiệt
c. Hãy thiết kế bộ điều khiển PID cho lò nhiệt dùng phương pháp
Zeigler- Nichols
Theo phương pháp Zeigler-Nichols ta có thông số của bộ điều khiển PID:
Kp = 1.2T2/T1K = 1.2*100/20*250 = 0.024
Ti = 2T1 = 2*20 = 40
Td = 0.5Ti = 0.5*20 = 10
⇨Ki = Kp/Ti = 0.024/40 = 0.0007
⇨Kd = Kp*Td = 0.024*10 = 0.24
d. Xây dựng mô hình điều khiển nhiệt độ như Hình 4.
4.2. Mô hình điều khiển nhiệt độ hệ lò nhiệt