Người báo cáo: Nguyễn Quang Nam Tài liệu: TUT06.01
Ngày: 10/3/2006 Trang: 1/6
Tutorial no 06.01
Gửi đến: Đoàn Hiệp, www.picvietnam.com
Nội dung: Sử dụng các module ADC và MCPWM của dsPIC
MICROSOFT WORD
Tóm tắt:
Đây là tutorial 5 về lập trình với dsPIC. Tutorial này hướng dẫn cách sử dụng module ADC và
MCPWM của dsPIC, là những module ngoại vi có sẵn trong các chip dsPIC. Các ví dụ được viết
bằng hợp ngữ và ngôn ngữ C (dùng trình dịch C30 Compiler của Microchip), và trong đa số trường
hợp hai phiên bản hợp ngữ và C30 là hoàn toàn tương đương.
1. Giới thiệu
Tutorial này giới thiệu các module ADC và MCPWM của dsPIC. Trước tiên, các
thông tin chung về các module ADC và MCPWM sẽ được giới thiệu, cùng với một trình
tự thiết lập chế độ làm việc cho mỗi module. Kế đến, các ví dụ sẽ minh họa cách sử
dụng các module này trong thực tế. Ví dụ 5-1 sẽ giới thiệu cách điều chỉnh độ rộng
xung theo một giá trị tương tự được đọc về thông qua một ngõ vào analog. Ví dụ 5-2
minh họa một chế độ làm việc khác của module ADC. Một số chú ý sẽ được nêu ra khi
cần thiết.
2. Các quy ước trong tài liệu
Mô tả Biểu thị Ví dụ
Font Palatino Linotype:
In nghiêng Tài liệu tham khảo dsPIC30F/33F
Programmer’s Reference
Manual
Viết hoa chữ đầu Một menu, hộp thoại Chọn Project Wizard
Đặt trong dấu nháy kép Tên riêng (của tập tin,
project, …) “Vidu3”
Font Courier:
Mã nguồn mov #0x8010, W0
Courier thường Tên tập tin Vidu3-1.s

Người báo cáo: Nguyễn Quang Nam Tài liệu: TUT06.01
Ngày: 10/3/2006 Trang: 2/6
3. Các ví dụ về module ADC và MCPWM
Bạn hãy chép các tập tin nguồn được đính kèm vào một thư mục nào đó mà bạn sẽ
dùng để tạo ra project “Vidu5”.
3.1. Giới thiệu về các module ADC và MCPWM
Các chip dsPIC có module ADC thuộc một trong hai dạng: 10-bit với tốc độ lên đến
1 MSPS (triệu mẫu/giây) hay 12-bit với tốc độ lên đến 200 kSPS (nghìn mẫu/giây). Các
module ADC được thiết kế nhằm phục vụ cho các mục đích khác nhau. Trong các
dsPIC thuộc dòng điều khiển động cơ (mà chip 4012 đang được xét là một trong số đó),
module ADC là loại 10-bit với tốc độ cao, nhằm đáp ứng yêu cầu về tốc độ lấy mẫu của
các bộ điều khiển truyền động điện. Các bộ ADC trong các dsPIC sử dụng thuật toán
chuyển đổi SAR, do đó có thời gian chuyển đổi đã được xác định trước.
Việc chuyển đổi tín hiệu từ dạng tương tự sang dạng số bao gồm hai giai đoạn: giai
đoạn lấy mẫu tín hiệu (sampling) và giai đoạn chuyển đổi (conversion). Bạn có thể bắt
đầu giai đoạn lấy mẫu bằng tay hay tự động. Thời điểm chấm dứt lấy mẫu (và bắt đầu
chuyển đổi) có thể do người dùng xác định (bằng cách tắt bit SAMP) hay được một
ngoại vi nào đó xác định (một timer dành riêng, module MCPWM, Timer 3, hay chân
INT0). Như vậy thời gian lấy mẫu là khác nhau với các thiết lập khác nhau. Giai đoạn
chuyển đổi dữ liệu cần có 12 xung clock cho module ADC, với một chu kỳ xung clock
TAD có thể được chọn là từ TCY/2 đến 32TCY. TCY chính là thời gian của một chu kỳ máy.
Module ADC của dsPIC có 4 bộ khuếch đại S/H (Sample and Hold), được đánh địa
chỉ là kênh 0 đến kênh 3. Bạn có thể chỉ dùng kênh 0, hay dùng kênh 0 và 1, và cũng có
thể dùng cả 4 kênh cho việc thu thập dữ liệu. Kênh 0 là kênh linh hoạt nhất trong việc
chọn lựa các ngõ vào tương tụ. Bộ đệm của module ADC có thể chứa được tối đa 16 kết
quả.
Module ADC cần được thiết lập cấu hình theo những bước sau:
– Chọn các chân dùng làm ngõ vào analog bằng các bit ADPCFG<15:0>
– Chọn nguồn điện áp chuẩn bằng các bit ADCON2<15:13>
– Chọn tốc độ xung clock cho module ADC phù hợp với tốc độ dữ liệu và tốc độ của
bộ xử lý bằng các bit ADCON3<5:0>
– Xác định bao nhiêu kênh S/H sẽ được dùng bằng các bit ADCON2<9:8> và
ADPCFG<15:0>
– Xác định cách thức lấy mẫu bằng các bit ADCON1<3> và ADCSSL<15:0>
– Chọn thứ tự lấy mẫu/chuyển đổi thích hợp bằng các bit ADCON1<7:0> và
ADCON3<12:8>
– Chọn cách biểu diễn kết quả chuyển đổi trong bộ đệm bằng các bit ADCON1<9:8>
Người báo cáo: Nguyễn Quang Nam Tài liệu: TUT06.01
Ngày: 10/3/2006 Trang: 3/6
– Chọn tốc độ tạo ngắt bằng các bit ADCON2<5:9>
– Bật module ADC bằng bit ADCON1<15>
Nếu có sử dụng ngắt, cần thiết lập thêm cấu hình cho ngắt A/D:
– Xóa bit ADIF
– Chọn độ ưu tiên cho ngắt A/D
Chú ý: Nguồn áp chuẩn ngoài cần được dùng cho các tốc độ chuyển đổi từ 500 kSPS
trở lên.
Các bit ADCS<5:0> (ADCON3<5:0>) được dùng để thiết lập tốc độ xung clock cho
module ADC. Giá trị của ADCS<5:0> được xác định từ công thức:
1
2−=
CY
AD
T
T
ADCS
Giá trị được chọn của TAD không được phép nhỏ hơn 83.33 ns.
Nếu việc chuyển đổi A/D được thực hiện trong chế độ Sleep, cần phải dùng bộ dao
động RC dành riêng cho module ADC bằng cách đặt bit ADRC(ADCON3<7>). Khi đó
giá trị của các bit ADCS<5:0> không có ý nghĩa đối với hoạt động của module ADC.
Module MCPWM có nhiều ngõ ra được điều chế độ rộng, thích hợp cho các ứng
dụng điều khiển động cơ, hay các nguồn xung. Một số dsPIC có nhiều module
MCPWM, và một module có thể có 6 hay 8 ngõ ra. Đối với dsPIC30F4012 đang được xét
ở đây, chip có một module với 6 ngõ ra, gồm 3 cặp bổ phụ (complementary).
Các dsPIC với module MCPWM có 6 ngõ ra sẽ có 3 bộ điều chế độ rộng độc lập, với
độ phân giải là TCY/2, tương ứng với 3 cặp ngõ ra bổ phụ. Các cặp ngõ ra này cũng có
thể được sử dụng độc lập, với trạng thái tích cực được thiết lập bằng các bit cấu hình.
Module MCPWM hỗ trợ nhiều kiểu ngõ ra: gióng hàng theo cạnh hay theo điểm giữa,
chế độ tạo xung duy nhất, hay gióng hàng theo điểm giữa có cập nhật kép.
Module MCPWM có thể tạo ngắt đặc biệt để đồng bộ các phép chuyển đổi A/D. Nó
cũng hỗ trợ tạo thời gian chết (dead time) cho chế độ dùng ngõ ra bổ phụ, và có một số
chân phát hiện sự cố bằng phần cứng.
Có thể khởi tạo hoạt động của module MCPWM theo trình tự sau:
– Xác định thời gian cho một chu kỳ xung bằng cách đặt một giá trị 15-bit vào thanh
ghi ngưỡng đếm chu kỳ xung PTPER, theo công thức
1
Prescaler −
×
=PTMRf
f
PTPER
PWM
CY , cho gióng hàng theo cạnh
1
2Prescaler −
××
=PTMRf
f
PTPER
PWM
CY , cho gióng hàng theo điểm giữa

Người báo cáo: Nguyễn Quang Nam Tài liệu: TUT06.01
Ngày: 10/3/2006 Trang: 4/6
– Thiết lập thanh ghi SEVTCMP cho việc tạo ngắt sự kiện đặc biệt (nếu cần)
– Thiết lập chế độ dùng các chân PWM bằng thanh ghi PWMCON1
– Thiết lập việc dùng overdrive trong thanh ghi OVDCON
– Đặt giá trị chu kỳ nhiệm vụ vào các thanh ghi PDCx tương ứng. Chú ý là độ phân
giải của chu kỳ nhiệm vụ là TCY/2, còn độ phân giải của chu kỳ xung là TCY. Do đó,
chẳng hạn PTPER = 0x7F thì PDCx = 0xFF mới là chu kỳ nhiệm vụ = 100%.
– Thiết lập postscaler cho việc tạo ngắt sự kiện đặc biệt, cách thức cập nhật thanh ghi
chu kỳ nhiệm vụ và việc đồng bộ overdrive bằng thanh ghi PWMCON2
– Thiết lập prescaler và postscaler cho thanh ghi đếm chu kỳ xung, chế độ đếm chu
kỳ xung và kích hoạt việc đếm chu kỳ xung bằng thanh ghi PTCON
Khi các ngõ ra PWM được sử dụng ở chế độ bổ phụ, bộ tạo thời gian chết được tự
động cho phép để tránh cho các linh kiện công suất bị trùng dẫn. Mỗi cặp ngõ ra bổ phụ
được dành riêng một thanh ghi đếm thời gian chết 6-bit, với một prescaler giúp cho việc
tạo thời gian chết được linh hoạt hơn.
Một (hay nhiều) chân phát hiện sự cố cũng có thể được dùng để đưa các ngõ ra
PWM về một trạng thái xác định khi xảy ra sự cố, bằng tác động của phần cứng.
Tín hiệu sự kiện đặc biệt luôn luôn được module MCPWM tạo ra, và module ADC
có thể dùng nó để đồng bộ việc chuyển đổi với việc tạo xung PWM. Tín hiệu sự kiện
đặc biệt này có thể dùng với một postscaler từ 1:1 đến 1:16, và điều này sẽ có ích nếu
việc chuyển đổi A/D không cần phải được thực hiện ở mỗi chu kỳ PWM.
Thông tin chi tiết về module ADC và MCPWM có thể được tìm thấy ở các chương
15 (module MCPWM) và 17 hay 18 (module ADC) của tài liệu dsPIC30F Family Reference
Manual (DS70046-phiên bản hiện tại là DS70046E).
3.2. Ví dụ 5-1
Làm theo các bước như trong tutorial 1 để tạo ra một project có tên là “Vidu5”, sau
đó bạn thêm vào project tập tin nguồn “Vidu5-1.s” và kịch bản liên kết
“p30f4012.gld” cho trường hợp dùng hợp ngữ. Đối với trường hợp dùng C30, chúng
ta cũng tạo một project theo cách tương tự, chỉ khác là chúng ta sẽ chọn “Microchip C30
Toolsuite” ở bước 2, và tập tin nguồn được sử dụng là “Vidu5-1.c”.
Trong ví dụ này, một giá trị điện áp từ 0V đến VDD được đặt vào ngõ vào AN0/RB0
(sử dụng một biến trở với điểm giữa nối vào AN0/RB0), chương trình sẽ đọc giá trị điện
áp thông qua module ADC và điều chỉnh độ rộng của xung tại các ngõ ra PWM1L/RE0,
PWM2L/RE2, và PWM3L/RE4 một cách tương ứng. Nếu bạn có dao động ký thì bạn có
thể theo dõi sự thay đổi độ rộng của xung (tần số xung được giữ cố định ở 40 kHz), nếu
không có dao động ký thì bạn có thể dùng một VOM để đo giá trị trung bình của dạng
Người báo cáo: Nguyễn Quang Nam Tài liệu: TUT06.01
Ngày: 10/3/2006 Trang: 5/6
sóng điện áp ra tại PWM1L/RE0, PWM2L/RE2, và PWM3L/RE4. Chương trình khá trực
quan và đã được chú thích đầy đủ, do đó không cần giải thích thêm ở đây.
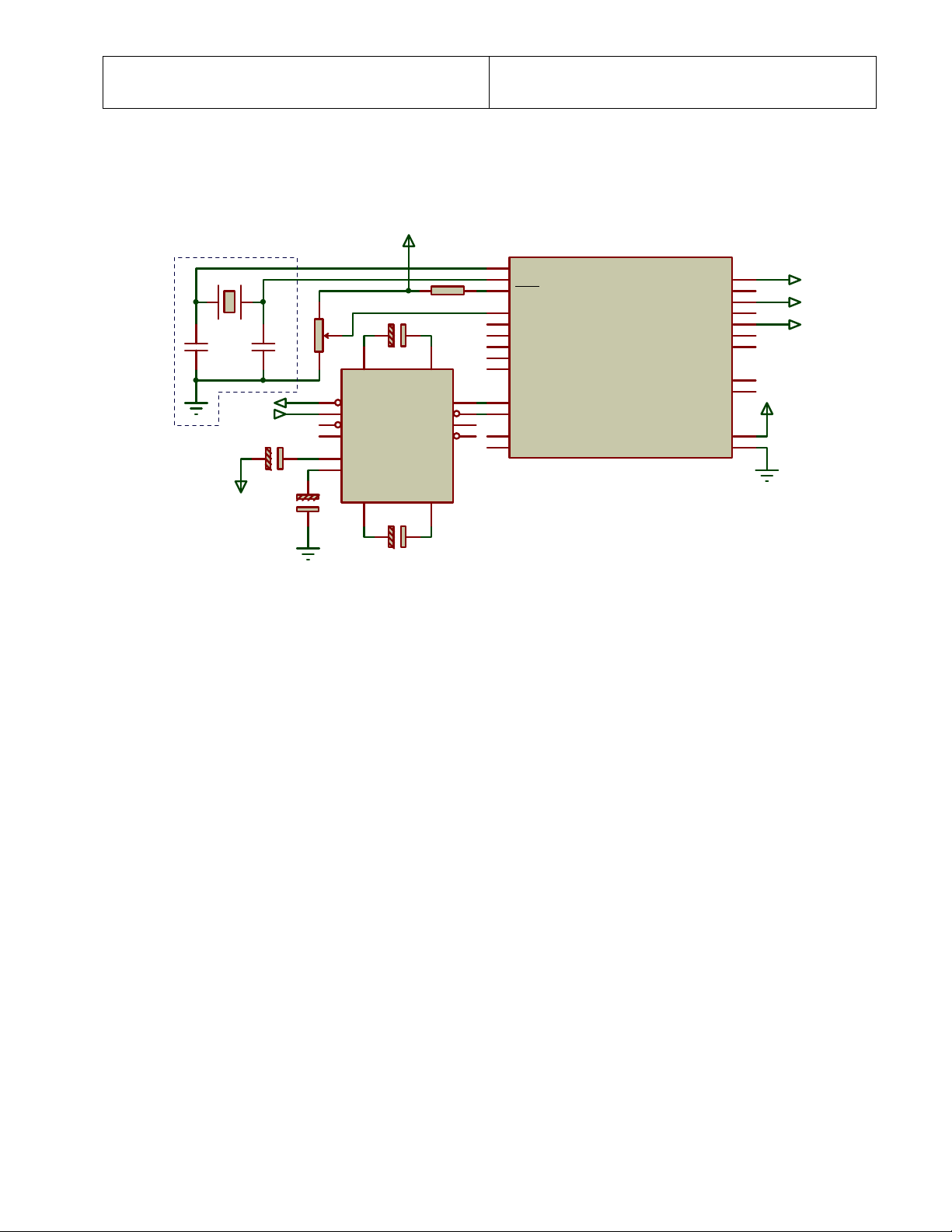
Mạch nguyên lý chung cho ví dụ này và ví dụ 5-2 được thể hiện trong hình 3.1.
CLKIN/OSC1
9
RC15/CLKO/OSC2
10
MCLR
1
RB0/CN2/VREF+/AN0/EMUD3
2
RB1/CN3/VREF-/AN1/EMUC3
3
RB2/CN4/SS1/AN2
4
RB3/CN5/INDX/AN3
5
RB4/CN6/IC7/QEA/AN4
6
RB5/CN7/IC8/QEB/AN5
7
RC13/CN1/U1ATX/T2CK/SOSCI/EMUD
11
RC14/CN0/U1ARX/T1CK/SOSCO/EMUC
12
EMUC2/OC1/IC1/INT1/RD0
15
EMUD2/OC2/IC2/INT2/RD1
14
RE0/PWM1L 26
RE1/PWM1H 25
RE2/PWM2L 24
RE3/PWM2H 23
RE4/PWM3L 22
RE5/PWM3H 21
FLTA/INT0/RE8 16
RF2/SDA/SDI1/U1RX/EMUC/PGC 18
RF3/SCL/SDO1/U1TX/EMUD/PGD 17
AVDD 28
AVSS 27
U1
DSPIC30F4012DIP
Vdd
X1
8MHz
C1
33pF
C2
33pF
Vdd
R1 33k
T1IN 11
R1OUT 12
T2IN 10
R2OUT 9
T1OUT
14
R1IN
13
T2OUT
7
R2IN
8
C2+
4
C2-
5
C1+
1
C1-
3
VS+
2
VS-
6
U3
MAX232
C3 1u
C4
1u
C5
1u
C6
1u
Vdd
Chan 2
Chan 3
PWM1L
PWM2L
PWM3L
RV1
5k
Hình 3.1: Mạch nguyên lý của phần cứng dùng cho các ví dụ 5-1 và 5-2
Những điểm cần chú ý trong ví dụ này là module MCPWM được dùng để kích hoạt
việc chuyển đổi A/D, với module ADC làm việc ở chế độ lấy mẫu tự động. Hơn nữa,
module MCPWM chỉ sử dụng các chân PWM1L, PWM2L, và PWM3L một cách độc lập.
3.3. Ví dụ 5-2
Thực hiện các thao tác tương tự như trong tutorial 2, bạn hãy loại bỏ tập tin
“Vidu5-1.s” khỏi project, và thêm tập tin “Vidu5-2.s” vào project (với project viết
bằng C30 thì bạn sẽ thay “Vidu5-1.c” bằng “Vidu5-2.c”).
Ví dụ này cũng thực hiện một việc khá đơn giản là đọc giá trị điện áp tại ngõ vào
AN0/RB0 sau mỗi giây, sau đó gửi kết quả đã đọc ra cổng RS-232 (ở dạng số hex). Mã
nguồn chương trình đã chú thích khá chi tiết, do đó không cần giải thích thêm ở đây.
Điểm cần chú ý ở ví dụ này là module ADC sẽ dùng bộ định thời dành riêng để tự
chấm dứt lấy mẫu và kích hoạt chuyển đổi A/D. Ngoài ra, module ADC làm việc ở chế
độ tự động lấy mẫu (lấy mẫu ngay sau khi module được kích hoạt).
4. Tóm tắt
Qua tutorial này, các module ADC và MCPWM của dsPIC đã được giới thiệu.
Những thông tin khái quát về các module ADC và MCPWM của dsPIC đã được đề cập.
Một trình tự khởi tạo cho các module ADC và MCPWM cũng đã được đề nghị. Thông
























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)