TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT Tp HCM
KHOA CƠ KHÍ CHẾ TẠO MÁY
BÁO CÁO THÍ NGHIỆM
LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG
Ứng dụng Simulink mô phỏng
và đánh giá chất lượng hệ thống
CBGD: Trần Thụy Uyên Phương
Sinh viên: Trương Đăng Khoa
Lớp 119110B
MSSV: 11911009
Tp HCM, Ngày 9 tháng 11 năm 2013
SVTH: Trương Đăng Khoa – MSSV: 11911009
P a g e 2 | 6
I. CHUẨN BỊ
II. KHẢO SÁT MÔ HÌNH ĐIỀU KHIỂN NHIỆT ĐỘ
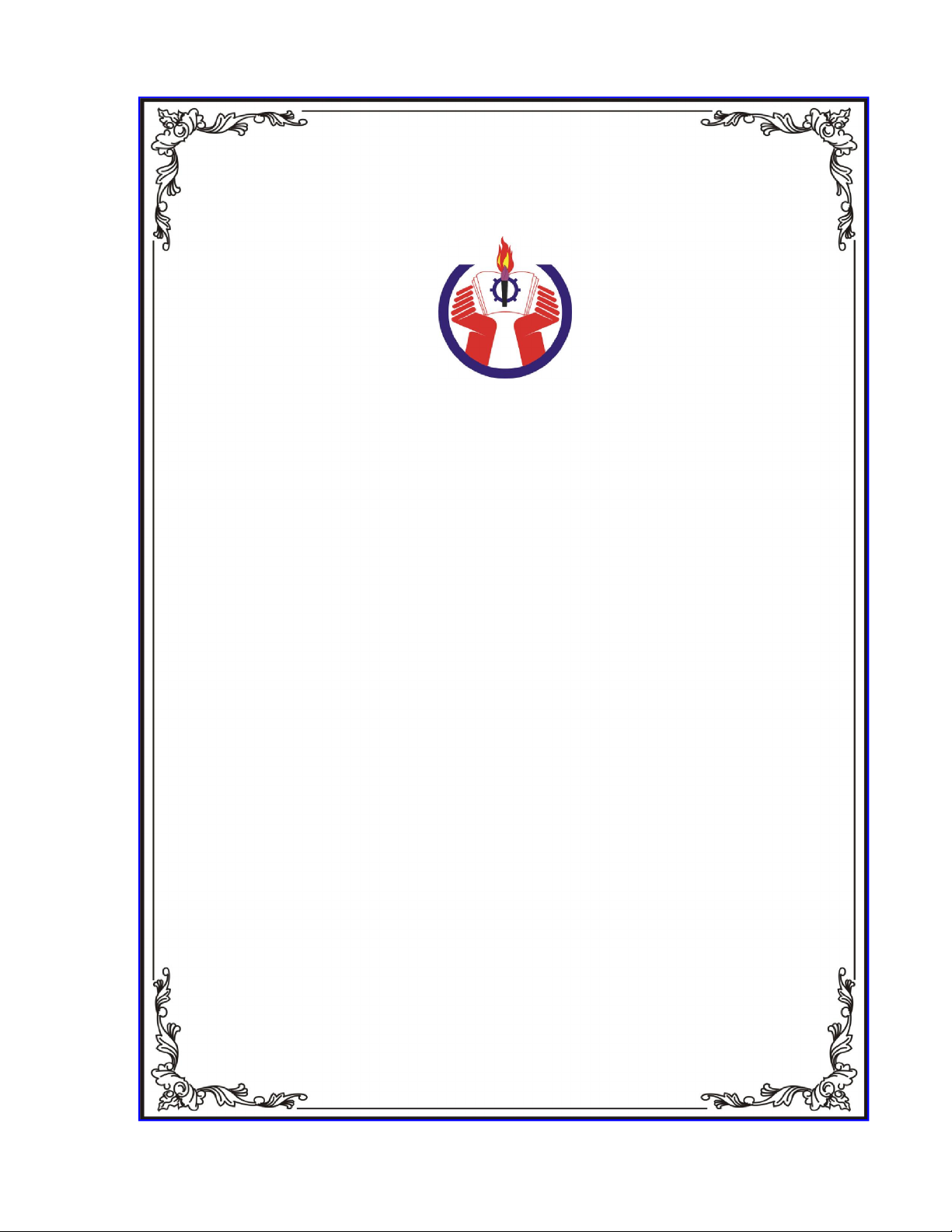
II.1. KHẢO SÁT HỆ HỞ
K=300: khoảng nhiệt độ cao nhất có thể điều khiển
Tt=12
T=210//200
II.2. KHẢO SÁT MÔ HÌNH ĐIỀU KHIỂN NHIỆT ĐỘ ON-OFF
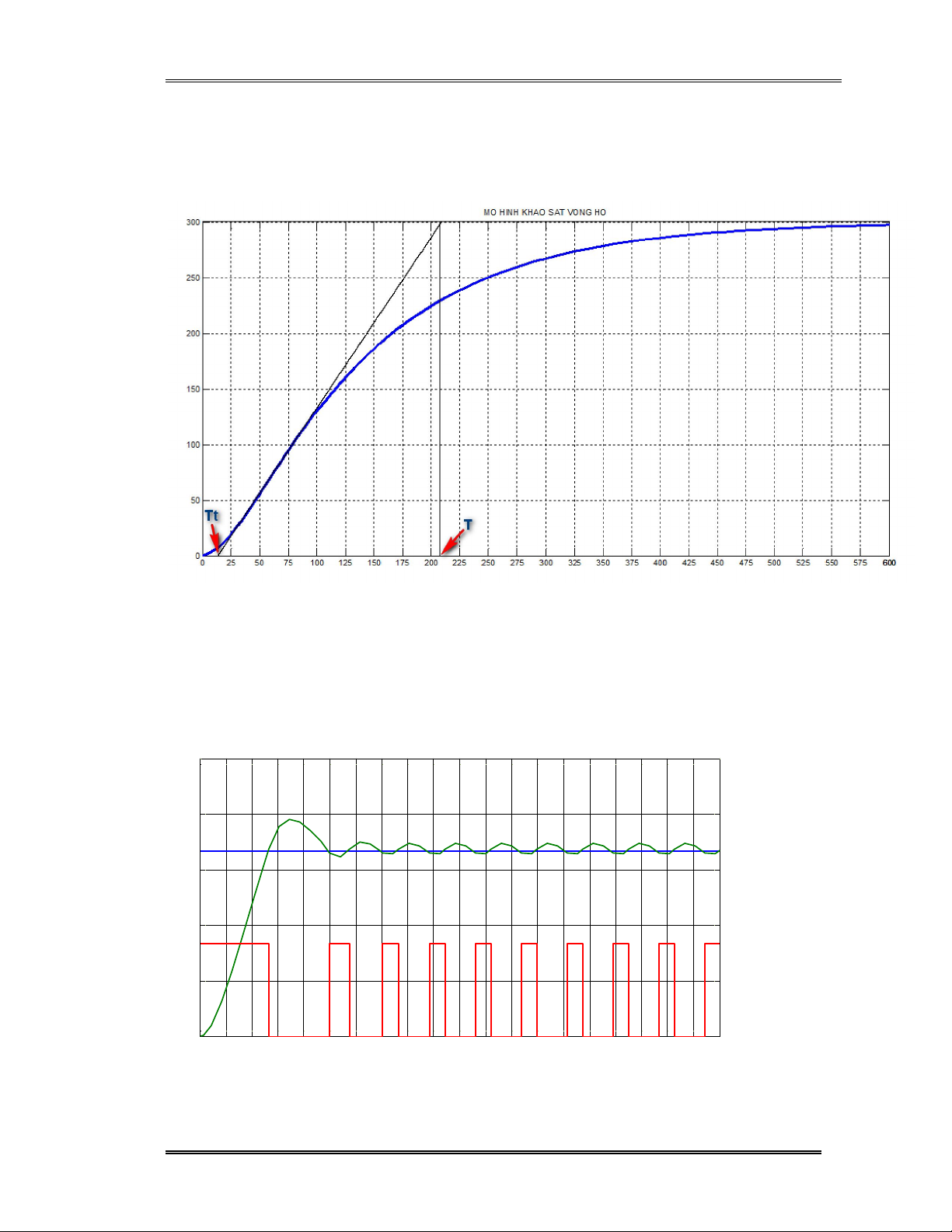
a. Khảo sát quá trình quá độ của hệ thống
Output when on/ off: 1/ 0
Swich on/ off point: +1/-1
Output when on/ off: 1/ 0
Swich on/ off point: +5/-5
0 30 60 90 120 150 180 210 240 270 300 330 360 390 420 450 480 510 540 570 600600
0
30
60
90
120
150150
MO HINH HE THONG DIEU KHIEN NHIET DO ON-OFF
SVTH: Trương Đăng Khoa – MSSV: 11911009
P a g e 3 | 6
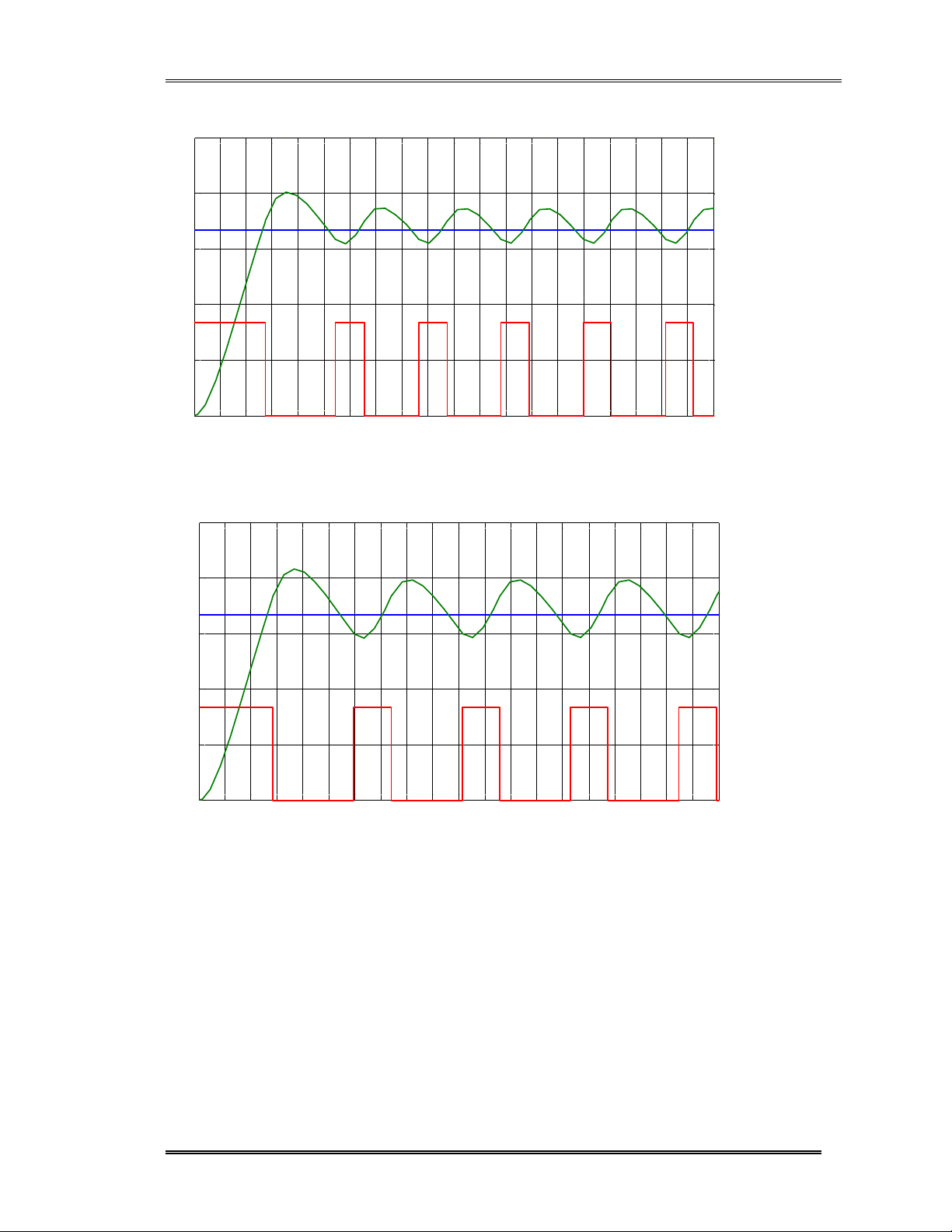
Output when on/ off: 1/ 0
Swich on/ off point: +10/-10
Output when on/ off: 1/ 0
Swich on/ off point: +20/-20
0 30 60 90 120 150 180 210 240 270 300 330 360 390 420 450 480 510 540 570 600600
0
30
60
90
120
150150
MO HINH HE THONG DIEU KHIEN NHIET DO ON-OFF
0 30 60 90 120 150 180 210 240 270 300 330 360 390 420 450 480 510 540 570 600600
0
30
60
90
120
150150
MO HINH HE THONG DIEU KHIEN NHIET DO ON-OFF
SVTH: Trương Đăng Khoa – MSSV: 11911009
P a g e 4 | 6
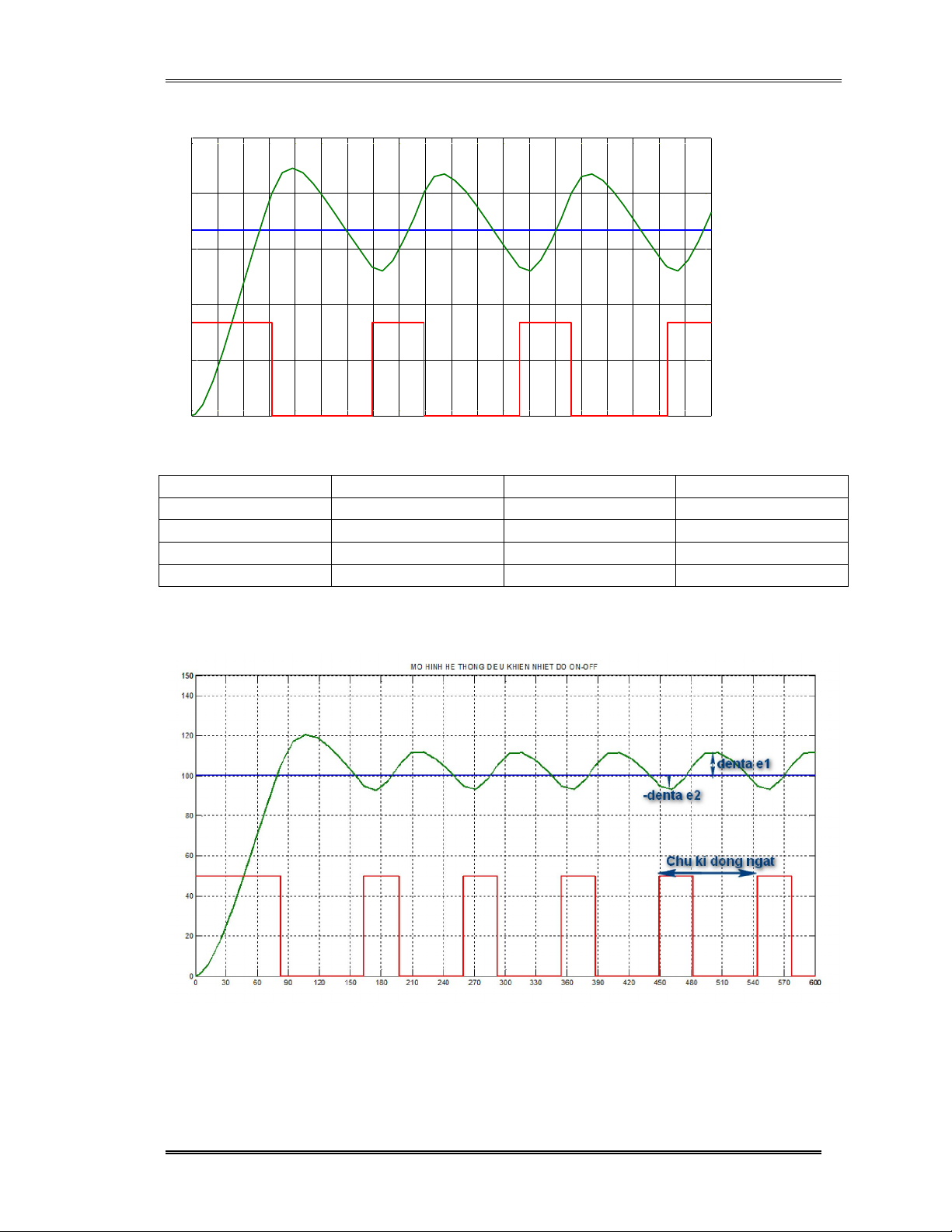
b. Sai số ngõ ra so với TH đặt & thời gian đóng ngắt tương ứng
Vùng trễ Denta e1 -Denta e2 Chu kì đóng ngắt (s)
+1/-1 4 -1 53
+5/-5 11 -7 98
+10/-10 19 -12 115
+20/-20 30 -21 170
c.
Output when on/ off: 1/ 0
Swich on/ off point: +5/-5
d. Để sai số ngõ ra sắp sỉ bằng 0 thì cần thu hẹp khoảng giá trị vùng trể, chu kì đóng ngắt
nhanh hơn.
Trong thực tế không thể thực hiện bộ điều khiển ON-OFF với khoảng giá trị vùng trể
hẹp, chu kì đóng ngắt nhanh, bởi vì gây ra hiện tượng có hại chattering (đảo trạng thái
liên tục)
0 30 60 90 120 150 180 210 240 270 300 330 360 390 420 450 480 510 540 570 600600
0
30
60
90
120
150150
MO HINH HE THONG DIEU KHIEN NHIET DO ON-OFF
SVTH: Trương Đăng Khoa – MSSV: 11911009
P a g e 5 | 6
II.3. KHẢO SÁT MÔ HÌNH ĐIỀU KHIỂN NHIỆT ĐỘ BẰNG PHƯƠNG PHÁP
PID
a.
Từ các giá trị T, Tt, K đã tìm được ở II.1.
K = 300
Tt = 12
T = 210
Ta tính toán KP, KI, KD theo phương pháp Ziegler Nichols như sau:
KP = 1.2*(T/K.Tt) = 0.07
TN = 2Tt = 24
Tv = 0.5Tt = 6
KI = KP/TN = 0.0029
KD = KP*Tv = 0.42
b.
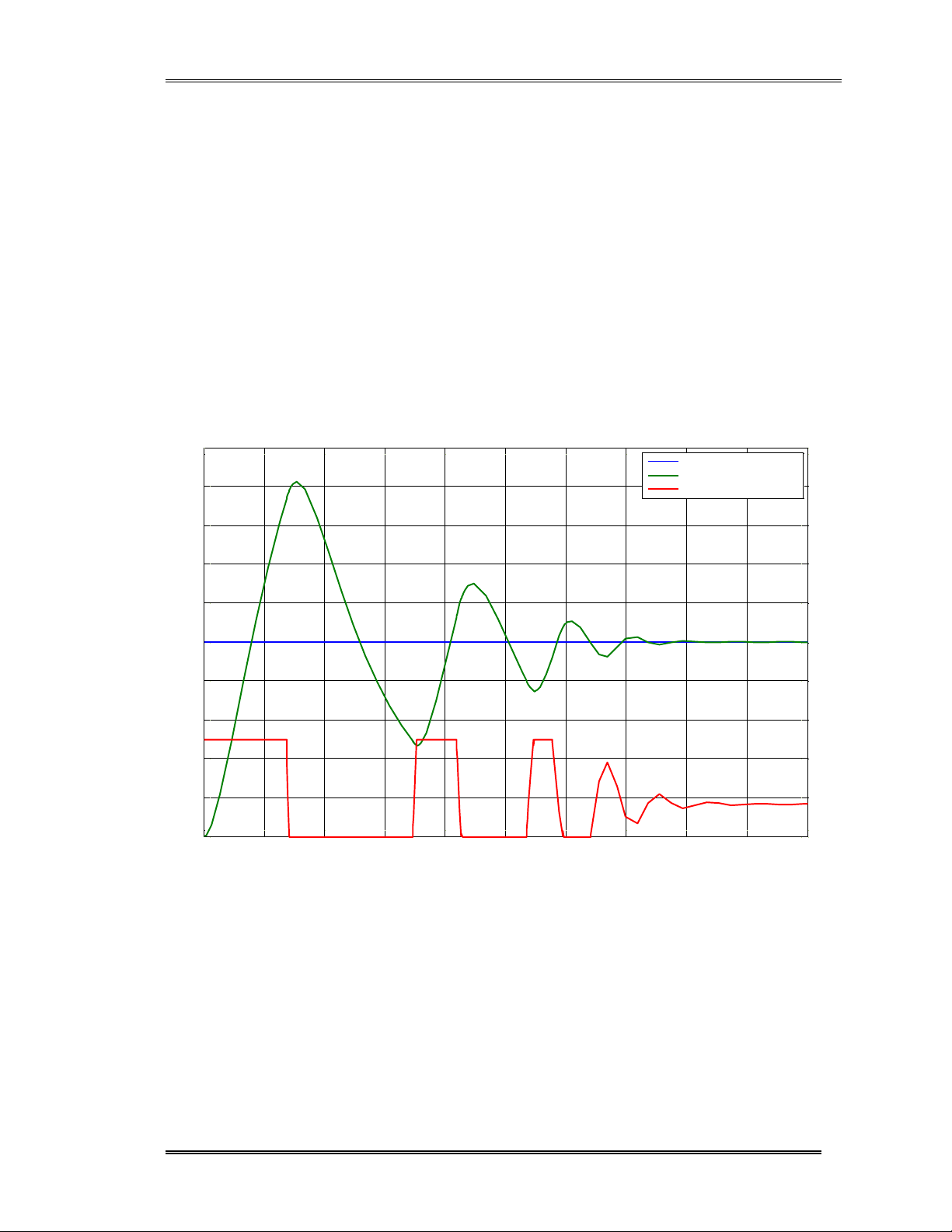
c. Nhận xét tín hiệu ngõ ra ở 2 phương pháp điều khiển PID và ON-OFF
- Tín hiệu ngõ ra của phương pháp điều khiển PID cho chất lượng đầu ra tốt hơn, tiến dần
về giá trị đặt ban đầu, sai số khi ổn định sấp sĩ 0. Sai sốe1 và -e2 ban đầu lớn.
- Tín hiệu ngõ ra của phương pháp điều khiển ON-OFF cho chất lượng đầu ra dao động
quanh giá trị đặt, để tín hiệu ngõ ra đáp ứng tốt hơn thì cần thu hẹp khoảng giá trị vùng
trễ, nhưng giá trị vùng trễ chỉ thu hẹp đến một ngưỡng nhất định nào đó để hạn chế hiện
tượng chattering, vì thế yêu cầu chính xác (sai số ngõ ra sấp sĩ 0) là không thể.
0 100 200 300 400 500 600 700 800 900 1000
0
20
40
60
80
100
120
140
160
180
200200
MO HINH HE THONG DIEU KHIEN NHIET DO PID
Tin hieu dat vao
Tin hieu dap ung
Tin hieu ra tu bo dieu khien




![Đồ án động cơ xăng GDI: Môn học chi tiết [Kèm tài liệu]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250730/vijiraiya/135x160/41751753869583.jpg)

![Tính toán sức kéo ô tô: Bài tập lớn [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250730/kimphuong1001/135x160/39061753859731.jpg)

















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)