1
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT
THÀNH PHỐ HỒ CHÍ MINH
KHOA CƠ KHÍ MÁY
BỘ MÔN CƠ ĐIỆN TỬ
-------------------------
ĐÁP ÁN
Môn: HỆ THỐNG ĐIỀU KHIỂN QUÁ TRÌNH
(Hướng HT CĐT), HK 2 NĂM HỌC 14-15
Mã môn học: 1229480
Đề số: 02; Đề thi có 2 trang.
Thời gian: 60 phút.
Được phép sử dụng tài liệu (có thể sử dụng laptop
không kết nối mạng)
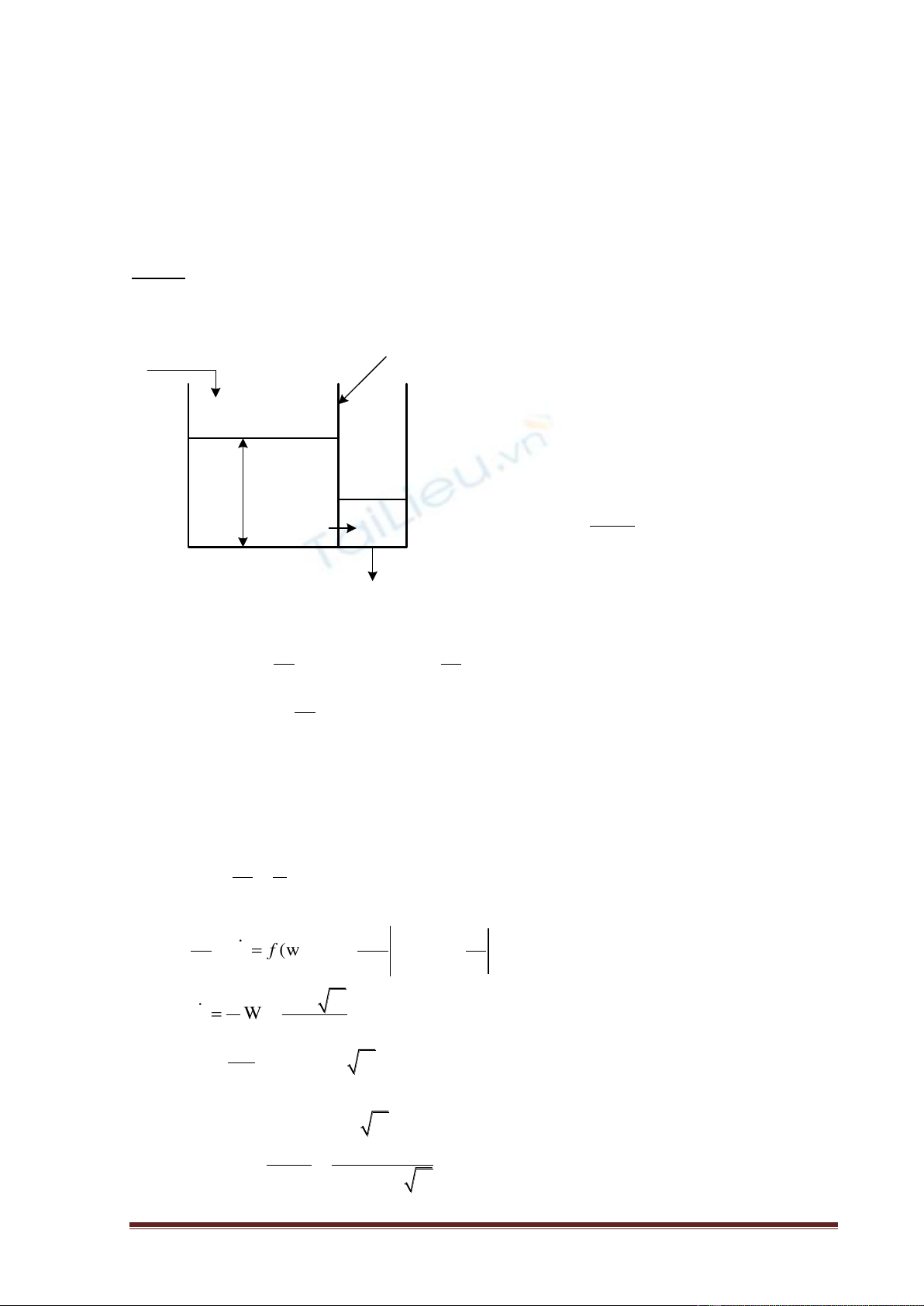
Câu 1: (3 điểm)
Cho bồn chứa có vách ngăn như sau. Biết lưu lượng ra w2 tỉ lệ với chiều cao chất lỏng theo
công thức:
3/2
2.w R h
, R: hằng số
A: tiết diện ngang của bồn chứa.
a. Viết phương trình toán mô tả quan hệ
giữa chiều cao mức chất lỏng và lưu
lượng vào.
b. Tuyến tính hóa phương trình trên
quanh điểm cân bằng. Tìm hàm truyền
1
()
() W ( )
Hs
Gs s
?
a (1 đ). Phương trình cân bằng khối:
1.5
1 2 1
w w A =w
dh dh
A Rh
dt dt
Phương trình toán:
1.5 1
w
dh
A Rh
dt
(1)
b (2 đ). Tại điểm cân bằng:
1.5 1
w
ss
Rh
Đặt
1 1 1
w w W
+
s
s
h h H
(0.5 đ) (2)
với
1
W ,H
lần lượt là lượng thay đổi nhỏ của
1
w,h
quanh điểm cân bằng
Từ (1), ta có
1.5
11
1w (w , )
dh Rh f h
dt A
(3)
Khai triển Taylor (3) quanh điểm ổn định:
1
1
11
w,
1w,
(w , ) W
wss
ss
ss
h
h
dh f f
H f h H
dt h
(0.5 đ)
1
1.5
1Ws
Rh
HH
AA
1
W 1.5 s
dH
A R h H
dt
(0.5 đ) (4)
Biến đổi Laplace pt (4), (ĐK đầu, tại điểm ổn định, = 0)
1
( ) W ( ) 1.5 ( )
s
AsH s s R h H s
1
( ) 1
() W ( ) 1.5 s
Hs
Gs sAs R h
(0.5 đ)
1
w
h
vách ngăn
2
w
2
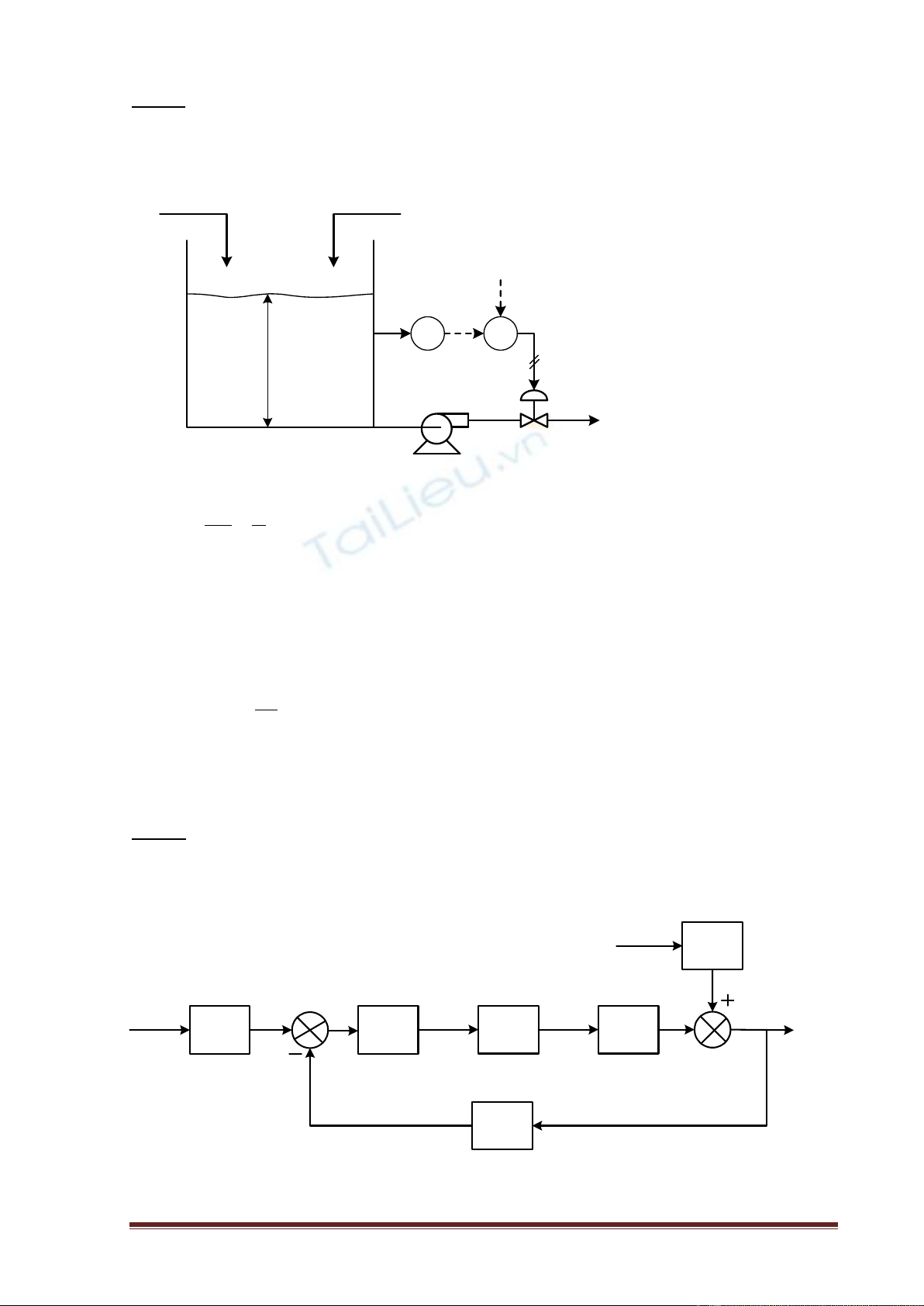
Câu 2: (4 điểm)
Cho hệ thống điều khiển mức như hình vẽ. Các thông số của hệ như sau: A = 3 [ft2], w3s =
10 [gal/min], Kv = -1.3 [gal/min/mA], Km = 4 [mA/ft]. Van điều khiển có hằng số thời gian
10[ ]
vs
, bỏ qua hằng số thời gian của cảm biến.
a. Viết phương trình toán
mô tả hệ bồn chứa. Phân
tích các biến quá trình?
b. Vẽ sơ đồ khối mô tả chi
tiết hệ thống?
c. Biết kỹ sư sử dụng bộ
điều khiển PI để điều khiển
mức. Tìm 2 thông số của
bộ điều khiển để hệ kín ổn
định.
a (1 đ). Phương trình toán mô tả hệ bồn chứa:
1 2 3
1dH W W W
dt A
Với
1 1 1
2 2 2
3 3 3
W w w
W w w
W w w
s
s
s
s
H h h
là biến thiên các đại lượng tương ứng quanh giá trị cân bằng
Biến đổi Laplace, ta có:
1 2 3
1
( ) ( ) ( ) ( )H s W s W s W s
As
Dựa trên hình vẽ ta có nhận xét sau:
h: là biến được điều khiển (CV)
w3: là biến điều khiển (MV)
w1, w2: là các nhiễu quá trình (DV)
Lưu ý: Vẫn chấm đúng nếu SV có dùng
trong phương trình
b. (1.5 đ)
SP
1
w
2
w
h
3
w
LT LC
m
h
p
c
G
m
G
m
K
SP h (PV)
p
3
w
12
ww
v
G
1p
G
2p
G
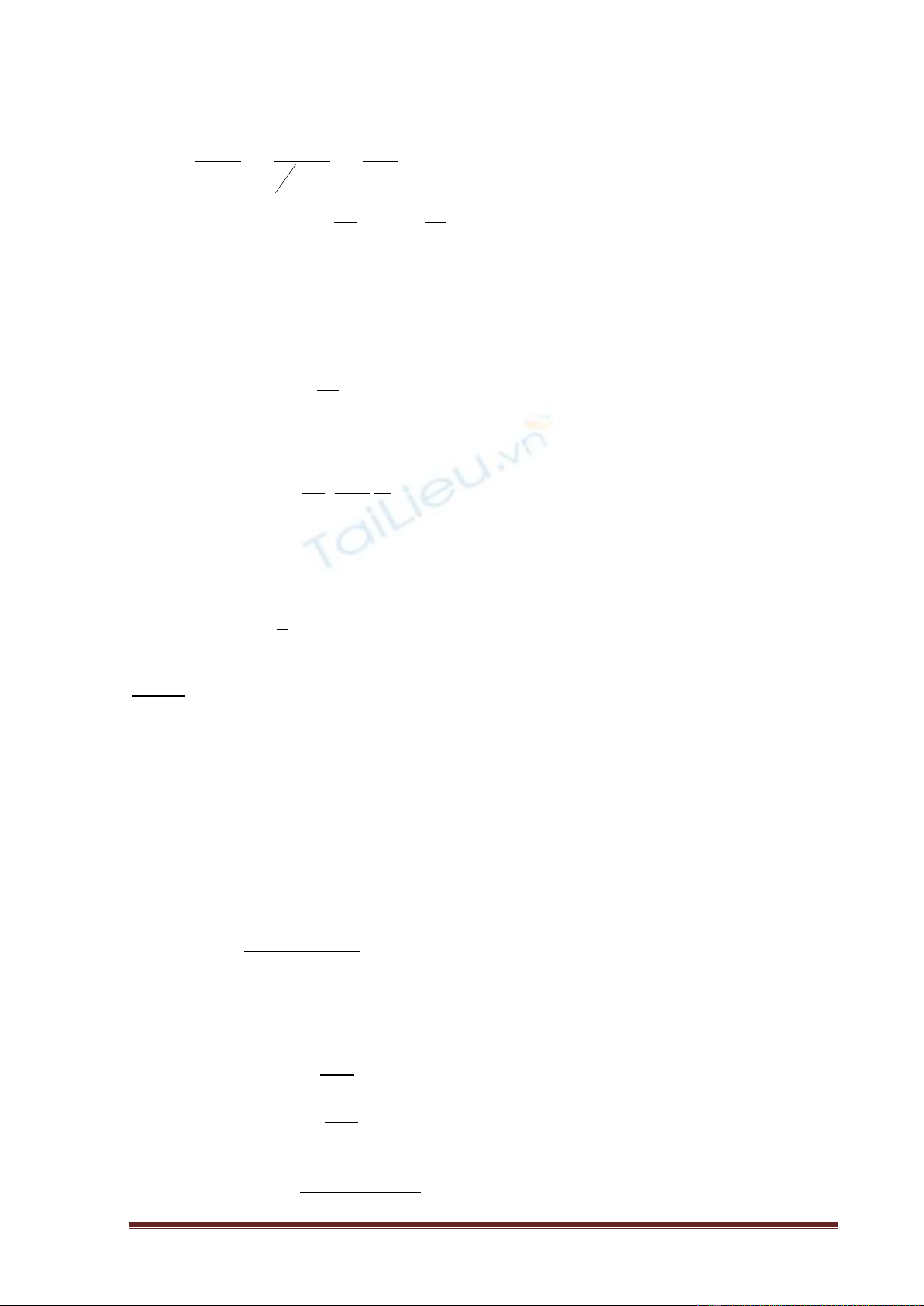
3
Trong đó:
Gc: hàm truyền bộ điều khiển
Gv: hàm truyền của van;
10( )
vs
=1/6 (min)
1.3 7.8
1
16
1
6
v
v
v
K
Gss
s
Từ câu a, ta có:
11
p
GAs
;
21
p
GAs
Gm: hàm truyền của cảm biến; bỏ qua hằng số thời gian của cảm biến
0
m
4
mm
GK
c. (1.5 đ)
1
(1 )
cp
i
GK Ts
(0.5 đ)
Phương trình đặc trưng hệ kín:
1
1 ( ) ( ) ( ) 0
c v p m
G s G s G s G
1 7.8 4
1 (1 ) 0
63
p
i
KT s s s
32
3 18 31.2 31.2 0
i i p i p
Ts Ts K Ts K
(0.5 đ)
Sử dụng tiêu chuẩn ổn định Routh, ta có điều kiện của Kp, Ti là:
0
1
6
p
i
K
T
(0.5 đ)
Câu 3: (3 điểm)
Một quá trình bao gồm cả cảm biến và van điều khiển có thể được mô hình hóa bởi hàm
truyền bậc 4 như sau:
1
() ( 1)(0.2 1)(0.04 1)(0.08 1)
Gs s s s s
a. Xấp xỉ hàm truyền về dạng khâu quán tính bậc 2 có trễ sử dụng quy tắc Skogestad.
b. Thiết kế bộ điều khiển PID, sử dụng phương pháp trực tiếp (Direct Synthesis), biết hằng
số thời gian của hệ kín
c
= 0.51 (s).
a. (1 đ)
Khâu quán tính bậc 2 có trễ có dạng sau:
12
() ( 1)( 1)
s
K
G s e
ss
Sử dụng quy tắc xấp xỉ của Skogestad, ta có:
K =1
11
20.08
0.2 0.24
2
0.08
0.04 0.08
2
Vậy ta có hàm truyền xấp xỉ
0.08
1
() ( 1)(0.24 1)
s
G s e
ss

4
b. (2 đ)
Hàm truyền bộ điều khiển PID:
1
(s) (1 )
c p d
i
G K T s
Ts
Theo phương pháp trực tiếp (DS) cho đối tượng bậc 2 có trễ, ta có các thông số của bộ điều
khiển như sau:
12
1 1 0.24 2.1
0.51 0.08
p
c
KK
12
1 0.24 1.24
i
T
12
12
0.24 0.1935
1.24
d
T
Vậy bộ điều khiển PID có hàm truyền như sau:
1
(s) 2.1(1 0.1935 )
1.24
c
Gs
s














![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)