Số hiệu: BM1/QT-PĐBCL-RĐTV 1
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT
THÀNH PHỐ HỒ CHÍ MINH
KHOA CƠ KHÍ CHẾ TẠO MÁY
BỘ MÔN CƠ ĐIỆN TỬ
-------------------------
ĐÁP ÁN HK 2 NĂM HỌC 17-18
Môn: ĐIỀU KHIỂN QUÁ TRÌNH
Mã môn học: PCTR421929
Đề số: 01; Đề thi có 2 trang.
Thời gian: 60 phút.
Được phép sử dụng tài liệu
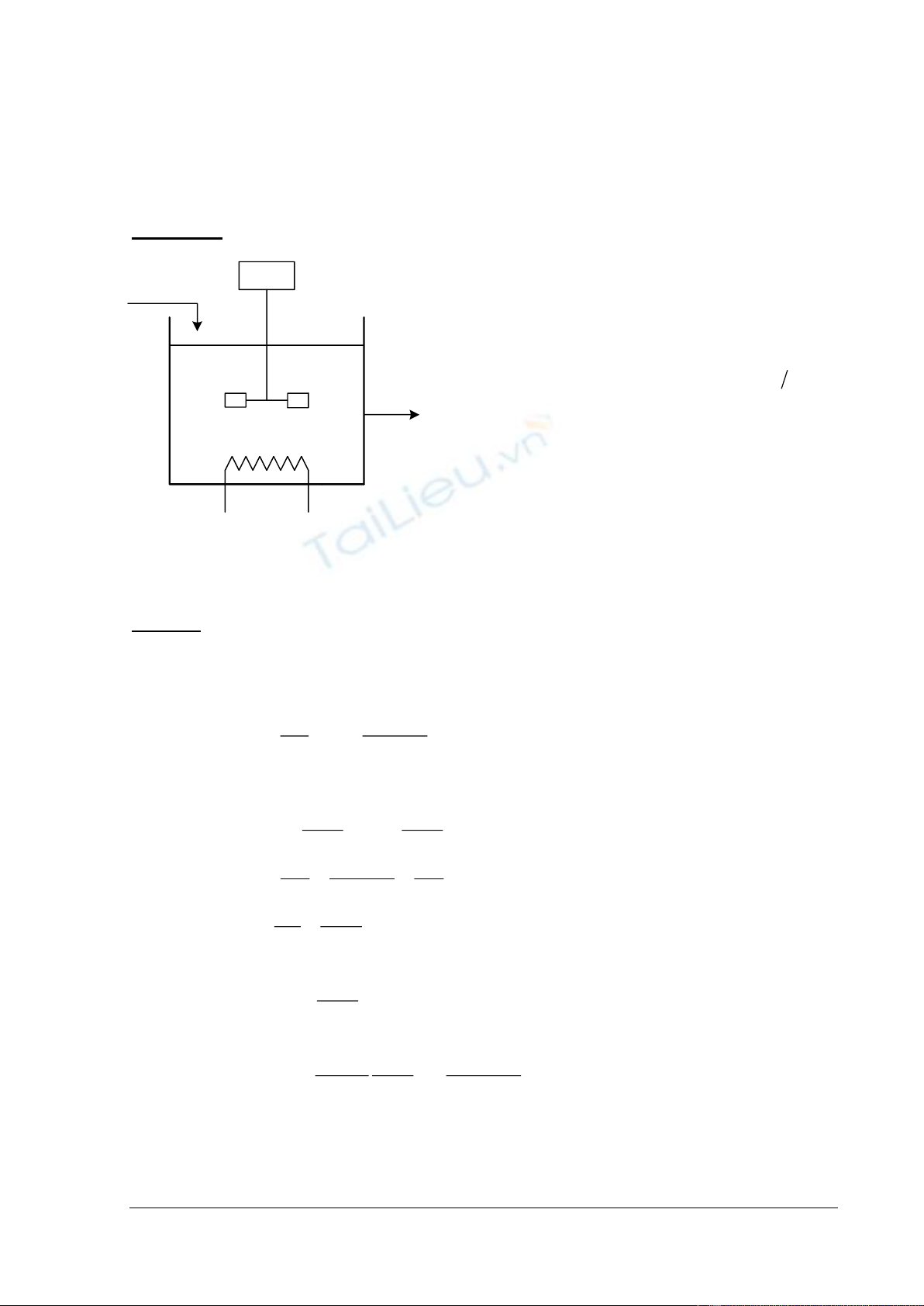
Bài 1 (4đ): Cho hệ gia nhiệt như hình.
Lưu lượng khối của chất vào,
1500 /w kg h
.
Thể tích của bình chứa V= 1 m3 (không đổi).
Trọng lượng riêng và nhiệt dung riêng của chất
vào lần lượt là:
3
900 / , 1.2 / .o
kg m C cal g C
.
Quá trình gia nhiệt đang hoạt động ổn định với
nhiệt độ vào T1= 300C và
18000 ( )Q kcal h
a. Hỏi nhiệt độ ra T tại trạng thái ổn định?
b. Hệ đang hoạt động ổn định thì bộ gia
nhiệt (heater) gặp sự cố và giảm công
suất 1/3. Hỏi nhiệt độ dòng ra thay đổi
như thế nào, vẽ đồ thị?
c. Đề suất phương pháp điều khiển nhiệt độ dòng ra. Hãy tự chọn biến điều khiển,
nhiễu quá trình và vẽ lưu đồ P&ID của hệ?
Đáp án:
a. Phương trình (2.44) slide bài giảng:
0 w w
is s s
CT CT Q
w ( )
s s is
Q C T T
0
18000 30 60
500 1.2
s
s is
Q
T T C
wC
(1)
b. Sử dụng pt (2.48) slide bài giảng, ta có hàm truyền:
' ' '
1
( ) ( ) ( )
11
i
K
T s Q s T s
ss
1 1 1
w 500 1.2 600
KC
900.1 1.8(h)
w 500
V
(0.5)
Bộ gia nhiệt giảm công suất 1/3, suy ra:
3
'6.10
()Qs s
(0.5)
Do đó, ta có phương trình của sự thay đổi nhiệt độ dòng ra:
3
'1/ 600 6.10 10
() 1.8 1 (1.8 1)
Ts s s s s
' /1.8
(t) 10(1 e )
t
T
'( ) 10T
Vậy nhiệt độ dòng ra giảm 100C (0.5)
11
,wT
,wT
Heater
Q
Số hiệu: BM1/QT-PĐBCL-RĐTV 1
Đồ thị đáp ứng (0.5)
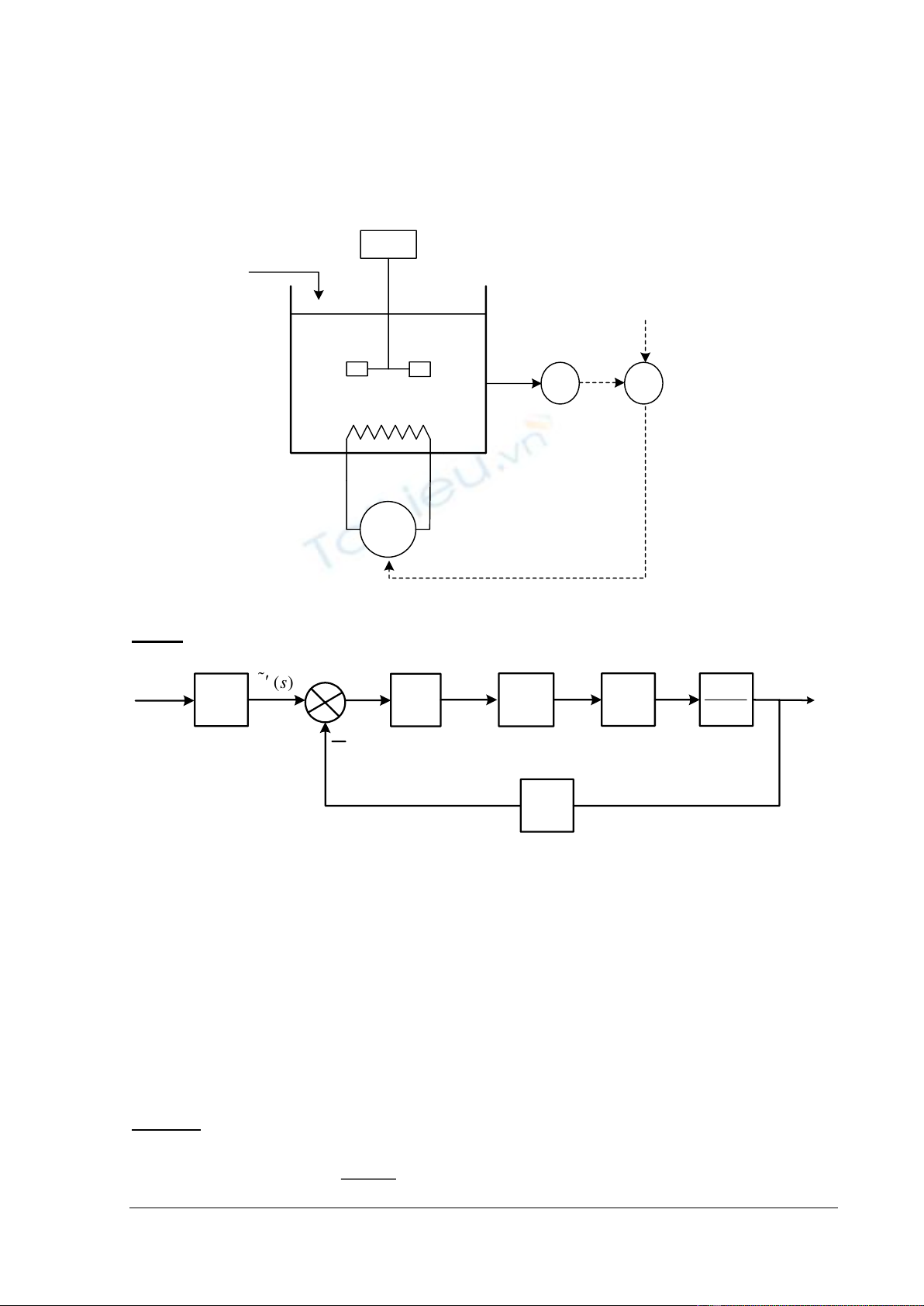
c. Sử dụng bộ điều khiển feedback với thuật toán điều khiển PID để điều khiển
nhiệt độ dòng ra. Lựa chọn biến quá trình
MV: Q
CV: T (0.5)
DV: T1
1
T
Heater
Q
TT FBC
SP
SCR
(0.5)
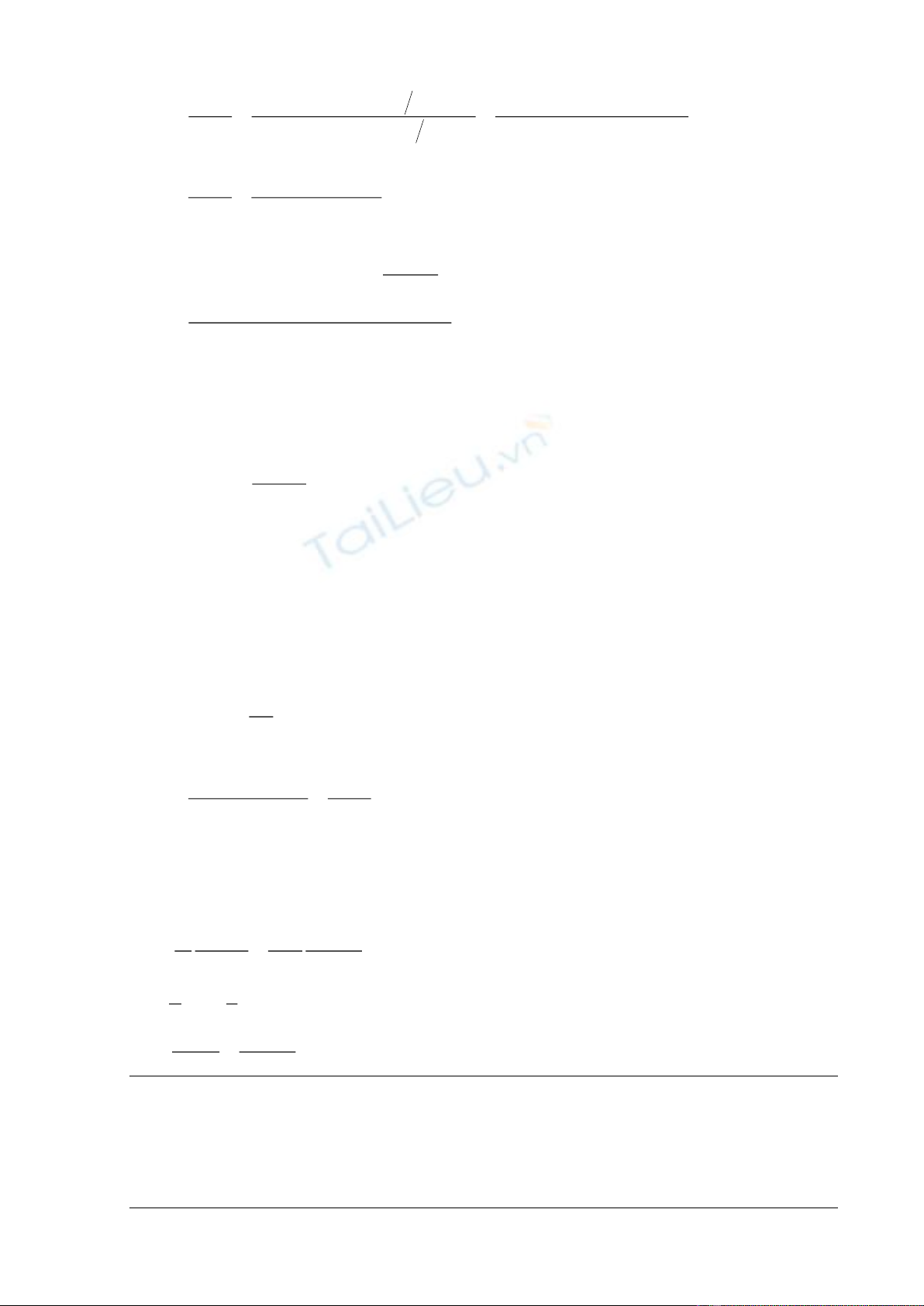
Bài 2: (6đ) Cho hệ điều khiển nhiệt có sơ đồ khối như hình
m
K
0C
()
sp
Ts
()
sp
Ts
mA
mA
()Es
()Ps
GcIP
Kv
K
()
t
Ps
mA
psi
1
s
p
Ke
s
m
K
0C
()Ts
()
m
Ts
mA
()
s
Ps
psi
Biết thiết bị đo nhiệt (cảm biến và bộ chuyển đổi) có thông số: tầm đo (0-2000C), tín
hiệu trả về dòng điện (4-20mA); Độ lợi (gain) cho bộ chuyển đổi dòng sang áp suất và
van điều khiển lần lượt là
0.75 (psi/mA)
IP
K
và
1.2
v
K
; Độ lợi, hằng số thời gian và
thời gian trễ của đối tượng điều khiển lần lượt là
5
p
K
,
5 (min)
và
1 (min)
a. Tìm hệ số Km của thiết bị đo. Tìm hàm truyền tổng quát của hệ?
b. Với bộ điều điều khiển tỉ lệ Gc(s) = Kc. Tìm điều kiện của Kc để hệ kín ổn định?
c. Chọn Kc = 2, tính offset của hệ khi tín hiệu vào thay đổi nấc đơn vị? Vẽ đáp ứng?
d. Để tăng chất lượng điều khiển, các kỹ sư đã sử dụng bộ điều khiển PID. Tìm các
thông số của bộ điều khiển bằng phương pháp IMC-PID với xấp xỉ Padé 1/1, chọn
c
theo đề xuất của Skogestad?.
Đáp án:
a. Tìm hệ số Km của thiết bị đo. Tìm hàm truyền tổng quát của hệ?
Hệ số
20 4 0.08
200 0
m
K
(mA/0C) (0.25)
Số hiệu: BM1/QT-PĐBCL-RĐTV 1
Hàm truyền tổng quát của hệ:
( s 1)
()
() ( ) 1 ( s 1) s 1
ss
m c IP v p m c IP v p
ss
sp m c IP v p m c IP v p
K G K K K e K G K K K e
Ts
Gs T s K G K K K e K G K K K e
(0.25)
Thế các giá trị vào, ta có:
0.36
()
() ( ) 5 1 0.36
s
c
s
sp c
Ge
Ts
Gs T s s G e
(0.5)
b. (SV có thể sử dụng các phương pháp xấp xỉ khác)
Sử dụng xấp xỉ Padé 1/1,
1 0.5
1 0.5
ss
es
, ta có:
2
0.36 (1 0.5 )
() 2.5 (5.5 0.18 ) 1 0.36
c
cc
Ks
Gs s K s K
(0.5)
Để hệ kín ổn định:
5.5 0.18 0 2.77 30.5
1 0.36 0
c
c
c
KK
K
(0.5)
c. Chọn Kc=2, sử dụng công thức tính offset 4.28, slide bài giảng:
offset 1
sp
OL
Y
K
(0.5)
với
1
sp
Y
OL m c IP v p
K K K K K K
0.72
Vậy offset = 1/(1+0.72) = 0.58 (0.5)
Vẽ đáp ứng (1)
d. Hàm truyền bộ điều khiển PID:
1
( ) 1
c c D
I
G s K s
s
(0.25)
Hàm truyền vòng hở của đối tượng điều khiển:
() 11
ss
m IP v p
K K K K e Ke
Gs ss
(0.5)
với
0.36
m IP v p
K K K K K
;
1
;
5
Theo đề xuất của Skogestad, chọn
1
c
(0.25)
Các thông số bộ điều khiển tính theo phương pháp IMC-PID, công thức 4.66 slide bài
giảng:
1 2 1 2 5 1 10.185
2 0.36 2 1 1
c
c
KK
15 5.5
22
I
(1)
50.455
2 2 5 1
D

























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)