Đề cương chi tiết môn học điều khiển logic Bộ môn tự động Đo Lường – Khoa Điện
Người biên soạn: Lâm Tăng Đức - Nguyễn Kim Ánh 60
AR=
OR=
thực IN1 và IN2.
Trạng thái tiếp điểm là đóng khi
lệnh so sánh IN1 = IN2 là đúng.
SMD, SD, LD, AC,
Constant, ∗VD,
∗AC, ∗LD
LDR<>
AR<>
OR<>
Lệnh so sánh giá trị của hai số
thực IN1 và IN2.
Trạng thái tiếp điểm là đóng khi
lệnh so sánh IN1 <> IN2 là đúng
ID, QD, MD, VD,
SMD, SD, LD, AC,
Constant, ∗VD,
∗AC, ∗LD
Real
LDR>
AR>
OR>
Lệnh so sánh giá trị của hai số
thực IN1 và IN2.
Trạng thái tiếp điểm là đóng khi
lệnh so sánh IN1 > IN2 là đúng
ID, QD, MD, VD,
SMD, SD, LD, AC,
Constant, ∗VD,
∗AC, ∗LD
Real
LDR>=
AR>=
OR>=
Lệnh so sánh giá trị của hai số
thực IN1 và IN2.
Trạng thái tiếp điểm là đóng khi
lệnh so sánh IN1 >= IN2 là đúng
ID, QD, MD, VD,
SMD, SD, LD, AC,
Constant, ∗VD,
∗AC, ∗LD
Real
LDR<
AR<
OR<
Lệnh so sánh giá trị của hai số
thực IN1 và IN2.
Trạng thái tiếp điểm là đóng khi
lệnh so sánh IN1 < IN2 là đúng
ID, QD, MD, VD,
SMD, SD, LD, AC,
Constant, ∗VD,
∗AC, ∗LD
Real
LDR<=
AR<=
OR<=
Lệnh so sánh giá trị của hai số
thực IN1 và IN2.
Trạng thái tiếp điểm là đóng khi
lệnh so sánh IN1 <= IN2 là đúng
ID, QD, MD, VD,
SMD, SD, LD, AC,
Constant, ∗VD,
∗AC, ∗LD
Real
==R
IN1
IN2
<>R
IN1
IN2
>R
IN1
IN2
>=R
IN1
IN2
<R
IN1
IN2
<=R
IN1
IN2
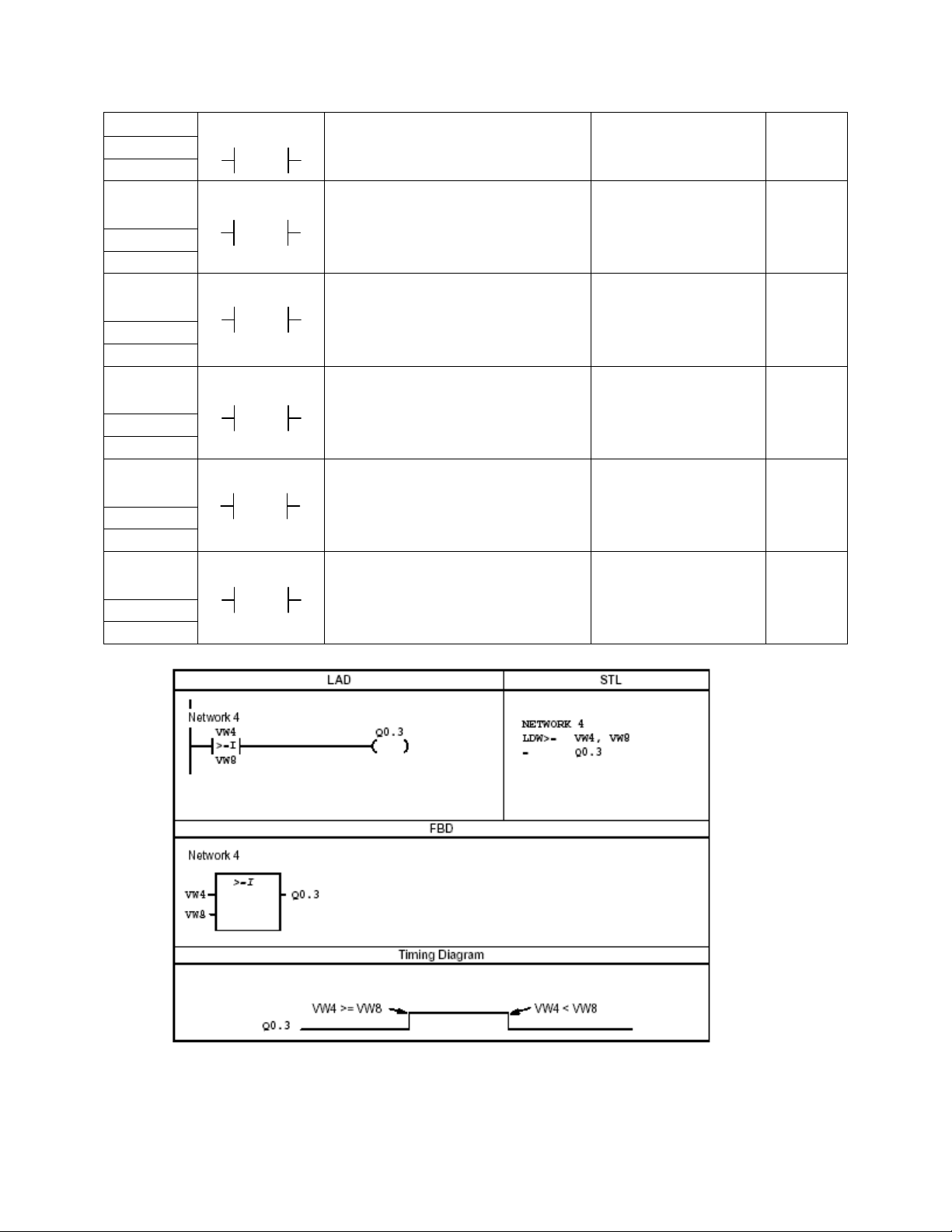
Hình 3.22: Ví dụ minh hoạ lệnh so sánh trong chương trình LAD, FBD và STL.
Đề cương chi tiết môn học điều khiển logic Bộ môn tự động Đo Lường – Khoa Điện
Người biên soạn: Lâm Tăng Đức - Nguyễn Kim Ánh 61
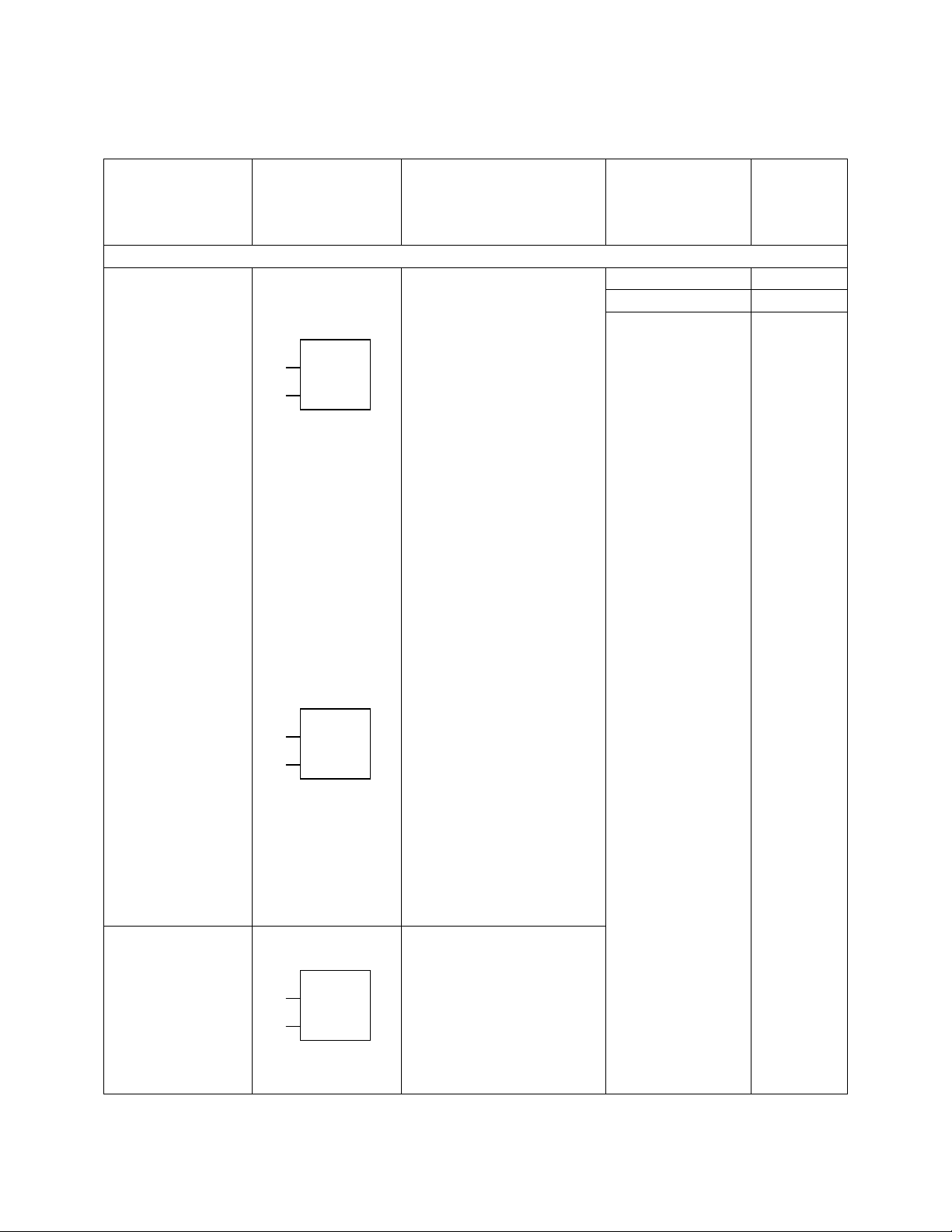
3. SIMATIC Timer Instructions:
STL
LAD
Mô tả
Description
Toán hạng
Operands
Kiểu dữ
liệu
Data
Types
On_Delay_Timer (TON)
Txxx: Constant word
IN : power flow bool
TON Txxx, PT
TON Txxx, PT
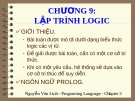
Đây là lệnh đếm thời
gian hoạt khi tín hiệu EN
là ON.
Khi giá trị dếm tức thời
trong thanh ghi CT >=
giá trị đặt trước trong
thanh ghi PT thì bit trạng
thái Txxx của bộ Timer
là ON.
Gía trị đếm tức thời
trong thanh ghi CT = 0
và bit trạng thái về off
khi tín hiệu ở đầu vào
là off. Ngược lại với
bộ TON, thanh ghi CV
và bit trạng thái vẫn
giữ nguyên trừ khi có
lệnh Reset bộ TONR.
Ngoài ra có thể sử
dụng lệnh Reset để
xoá thanh ghi tức thời
cũng như bit trạng thái
của bộ TON.
Ta có thể sử dụng toán
hạng Word (INT)
tương ứng với lệnh
INT hay toán hạng
tương ứng với bit trạng
thái.
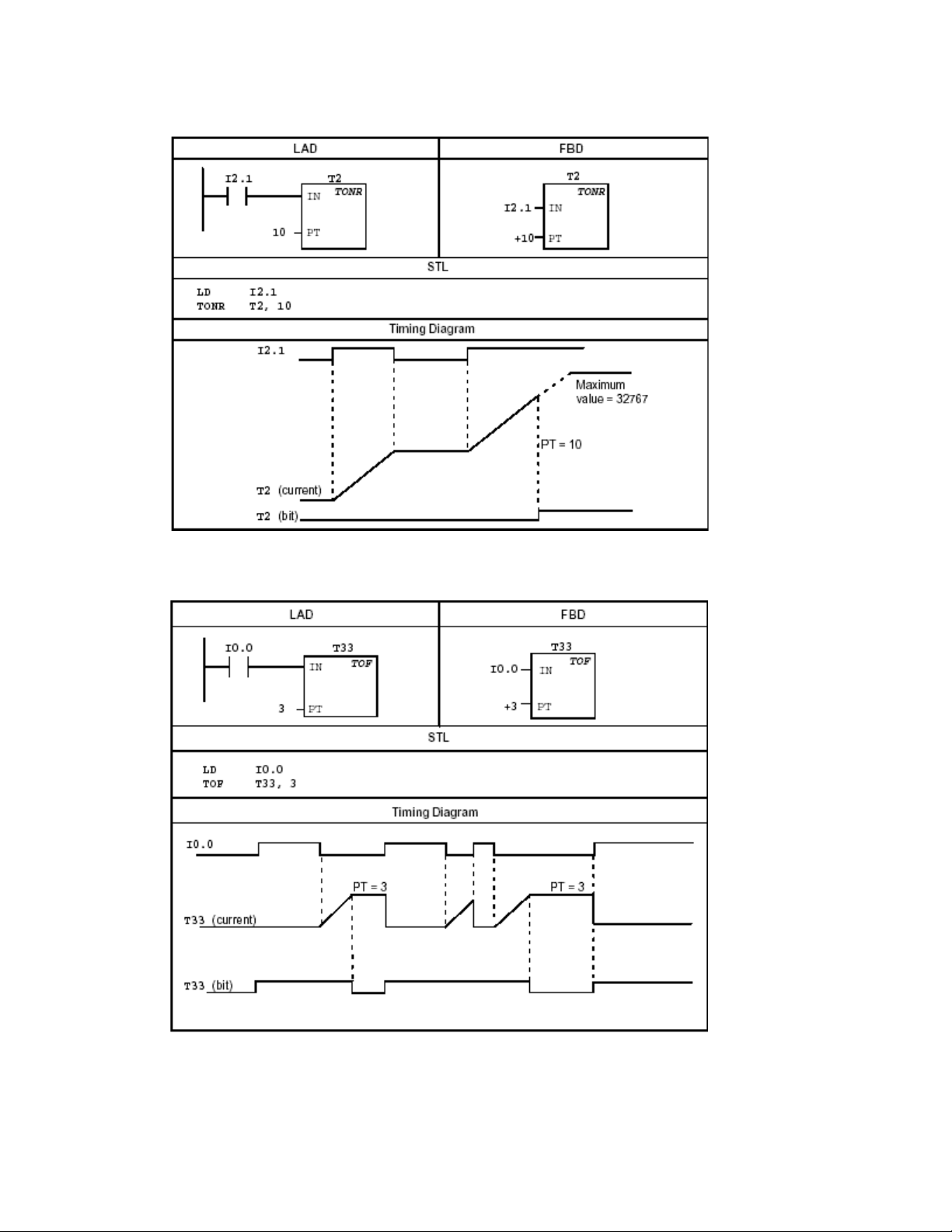
TOF Txxx, PT
Khi tín hiệu đầu vào
EN = 1 bộ TOF không
hoạt động. chỉ hoạt
động khi có sườn
xuống của tín hiệu đầu
vào. Bit trạng thái
được bật lên ON khi
PT: IW, QW,
MW, SMW,
VW, LW, SW,
AIW, T, C, AC,
Constant, ∗VD,
∗AC, ∗LD
INT
TONR
E
N
P
T
Txxx
TON
E
N
P
T
Txxx
TOF
E
N
P
T
Txxx
Đề cương chi tiết môn học điều khiển logic Bộ môn tự động Đo Lường – Khoa Điện
Người biên soạn: Lâm Tăng Đức - Nguyễn Kim Ánh 62
CV = PT.
Reset TOF (cả CV và
bit trạng thái) bằng
cách cung cấp tín hiệu
vào đầu vào EN.
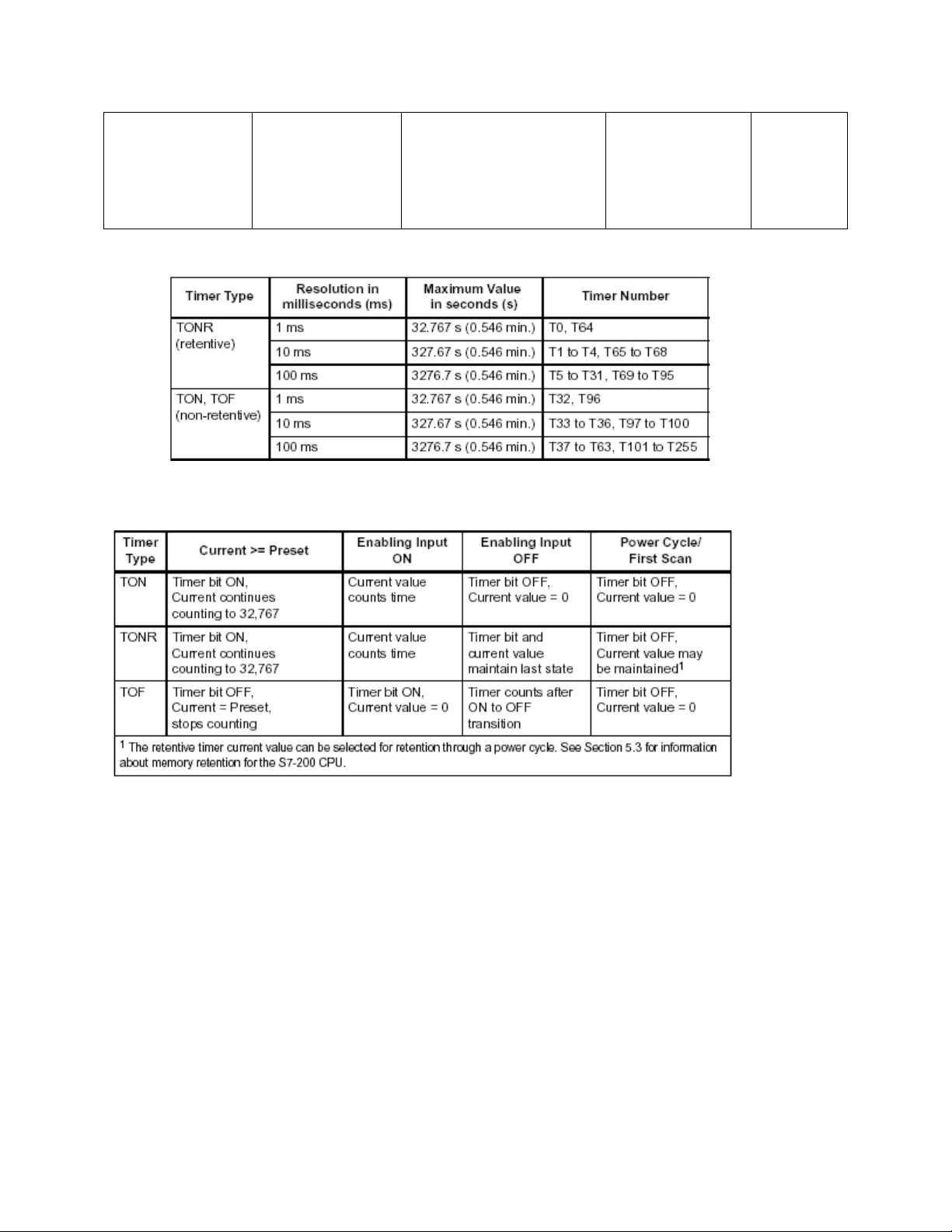
Bảng : Số Timer và độ phân giải.
Note: Không thể cùng một lúc sử dụng cả 2 bộ TON và TOF cho cùng 1 địa chỉ (ví dụ
T37).
Bảng : Gía trị đặt tối đa cho từng loại và trạng thái làm việc của các loại Timer.
Việc sử dụng tiếp điểm thường đóng Q0.0 bên dưới để đảm làm tín hiệu đầu vào cho
Timer đảm bảo cho Q0.0 sẽ có giá trị logic bằng 1 trong một vòng quét ở mỗi thời điểm
mà giá trị đếm tức thời của bộ Timer đạt giá trị đặt trước PT.
Đề cương chi tiết môn học điều khiển logic Bộ môn tự động Đo Lường – Khoa Điện
Người biên soạn: Lâm Tăng Đức - Nguyễn Kim Ánh 63
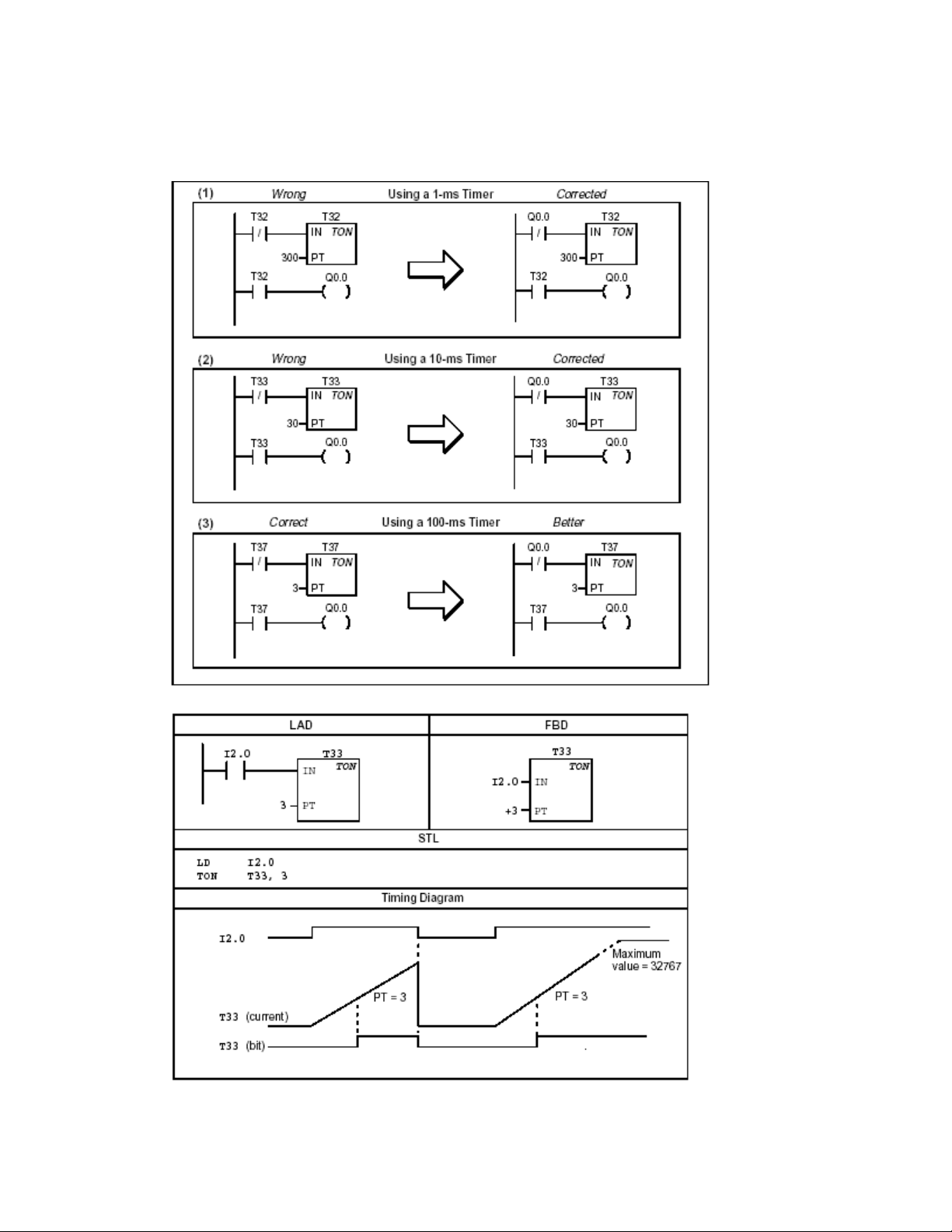
Tạo khoảng thời gian trễ 300ms bằng các loại timer có độ phân giải khác nhau
Hình 23: Ví dụ cách sử dụng bộ TON.
Đề cương chi tiết môn học điều khiển logic Bộ môn tự động Đo Lường – Khoa Điện
Người biên soạn: Lâm Tăng Đức - Nguyễn Kim Ánh 64
Hình 24: Ví dụ cách sử dụng bộ TONR
.
Hình 25: Ví dụ cách sử dụng bộ TOF












![Bài giảng Tin học đại cương Trường Đại học Lâm Nghiệp [Năm mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/85781779160272.jpg)
![Giáo trình Cấu trúc dữ liệu và giải thuật - TS. Đào Thị Hường [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/49281779160273.jpg)





![Câu hỏi ôn tập Đồ hoạ máy tính [năm/khóa/chương trình]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/48771779155952.jpg)





%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)