
PHÂN M DÂU Ơ
GI IƠ THIÊU HÊ THÔNG ROBOT CÔNG NGHI P VA HÊ Ệ
THÔNG SAN XUÂT LINH HOAT FMS
I. TÔNG QUAN VÊ C ĐIÊN T Ơ Ư
C đi n t (Mechatronics) là m t k ch b n t nhiên trong quá trình phát tri n c a k thu t hi n đ i.ơ ệ ử ộ ị ả ự ể ủ ỹ ậ ệ ạ
S phát tri n c a máy tính, và sau đó là máy tính siêu nh , máy tính tích h p, công ngh thông tin, kự ể ủ ỏ ợ ệ ỹ
thu t ph n m m, đã bu c c đi n t ph i phát tri n nh m t yêu c u c p thi t vào nh ng năm cu i c aậ ầ ề ộ ơ ệ ử ả ể ư ộ ầ ấ ế ữ ố ủ
th k 20. Đ ng tr c ng ng c a c a th k 21, v i s mong ch nh ng ti n b trong các h C -ế ỷ ứ ướ ưỡ ử ủ ế ỷ ớ ự ờ ữ ế ộ ệ ơ
đi n - Sinh h c, máy tính l ng t , h th ng pico và nano, và nh ng công ngh khác đang tri n khai.ệ ọ ượ ử ệ ố ữ ệ ể
T ng lai c a c đi n t là đ y ti m năng.ươ ủ ơ ệ ử ầ ề
Đ nh nghĩa c đi n t đã b t đ u đ c quan tâm k t khi đ nh nghĩa ban đ u đ c đ a ra b iị ơ ệ ử ắ ầ ượ ể ừ ị ầ ượ ư ở
công ty đi n Yasakawa. Trong các tài li u th ng m i, Yasakawa đã đ nh nghĩa c đi n t nh sau:ệ ệ ươ ạ ị ơ ệ ử ư
T "mechatronics" đ c t o ra b i "mecha" trong t mechanism(có nghĩa là c c u) và "tronics" trongừ ượ ạ ở ừ ơ ấ
t electronics(có nghĩa là đi n t ). Nói cách khác công ngh và các s n ph m đ c phát tri n s đ c k từ ệ ử ệ ả ẩ ượ ể ẽ ượ ế
h p nhi u ph n đi n t và c khí m c đ tích h p r t cao, không th nói đâu là đi m b t đ u và đâu làợ ề ầ ệ ử ơ ở ứ ộ ợ ấ ể ể ắ ầ
đi m k t thúc, không có m t ranh gi i rõ ràng.ể ế ộ ớ
Đ nh nghĩa ti p theo v c đi n t đ c ti p t c phát tri n sau khi Yasakawa đ a ra đ nh nghĩa đ uị ế ề ơ ệ ử ượ ế ụ ể ư ị ầ
tiên. M t trong nh ng đ nh nghĩa c đi n t đ c trích d n phát tri n b i Harashima, Tomizuka vàộ ữ ị ơ ệ ử ượ ẫ ể ở
Fukada vào năm 1996. Trong đó c đi n t đ c đ nh nghĩa là s tích h p c a c khí, đi n t và đi uơ ệ ử ượ ị ự ợ ủ ơ ệ ử ề
khi n máy tính thông minh trong m t thi t k , ch t o các s n ph m và quy trình công nghi p.ể ộ ế ế ế ạ ả ẩ ệ
Trong cùng năm, m t đ nh nghĩa khác đ c đ a ra b i Auslander và Kempf: C đi n t là s áp d ngộ ị ượ ư ở ơ ệ ử ự ụ
t ng h p các quy t đ nh t o nên ho t đ ng c a các h th ng v t lý.ổ ợ ế ị ạ ạ ộ ủ ệ ố ậ
Ti p t c m t đ nh nghĩa khác xu t hi n năm 1997 c a Shetty và Kolk: C đi n t là m t ph ngế ụ ộ ị ấ ệ ủ ơ ệ ử ộ ươ
pháp t duy dùng cho vi c thi t k t i u các s n ph m c đi n.ư ệ ế ế ố ư ả ẩ ơ ệ
G n đây, W.Bolton đ nh nghĩa: M t h c đi n t không ch là m t s k t h p gi a c khí và đi nầ ị ộ ệ ơ ệ ử ỉ ộ ự ế ợ ữ ơ ệ
t , và cũng không đ n thu n là m t h th ng đi u khi n, nó là m t s k t h p toàn di n gi a t t cử ơ ầ ộ ệ ố ề ể ộ ự ế ợ ệ ữ ấ ả
chúng l i v i nhau.ạ ớ
T t c nh ng đ nh nghĩa và phát bi u trên v c đi n t đ u xác đáng và giàu thông tin, tuy nhiênấ ả ữ ị ể ề ơ ệ ử ề
b n thân chúng n u đ ng riêng l l i không đ nh nghĩa đ c đ y đ thu t ng C đi n tả ế ứ ẻ ạ ị ượ ầ ủ ậ ữ ơ ệ ử.
S phát tri n và tính n i tr i c a c đi n t t o cho các s n ph m và h th ng th c hi n t t h n ,linhự ể ổ ộ ủ ơ ệ ử ạ ả ẩ ệ ố ự ệ ố ơ
ho t h n,thông minh h n trong ch c năng và c trong kh năng v n chuy n, giao ti p truy n th ng.ngàyạ ơ ơ ứ ả ả ậ ể ế ề ố
nay đã xu t hiên. Ngày nay c đi n t đ c ng r t nhi u trong s n xu t công nghi p cũng nh nhi u lĩnhấ ơ ệ ử ượ ứ ấ ề ả ấ ệ ư ề
v c khác.Các s n ph n c đi n t đi n hình nh :robotics,h th ng s n xu t linh ho t FMS có tích h pứ ả ẩ ơ ệ ử ể ư ệ ố ả ấ ạ ợ
CIM,máy công c CNC,h vi c đi n t …đã t o nên m t n n công nghi p hi n đ i.ụ ệ ơ ệ ử ạ ộ ề ệ ệ ạ
Trong khuôn kh bài báo cáo ki n t p tôi xin gi i thi u v 2 s n ph m c a c đi n t là : “ ổ ế ậ ớ ệ ề ả ẩ ủ ơ ệ ử h th ngệ ố
Robot hàn OTC Daihen AII-V6 ” và “ tr m phân ph i v t gia công”ạ ố ậ

II. H TH NG ROBOT CÔNG NGHI PỆ Ố Ệ
Robot công nghi p là c c u chuy n đ ng t do có th l p trình l i b ng các ch ng trình,t ngệ ơ ấ ể ộ ự ể ậ ạ ằ ươ ổ
h p các ch ng trình đ t ra trên các t a đ ;có kha năng đ nh v đ nh h ng,di chuy n các đ i t ngợ ươ ặ ọ ộ ị ị ị ướ ể ố ươ
v t ch t :chi ti t .dao c .gá l p… theo nh ng hành trình thây đ i đã ch ng trình hóa nh m th c hi nậ ấ ế ụ ắ ữ ổ ươ ắ ự ệ
các nhi m v công ngh khác nhau. ệ ụ ệ
OTC Daihen AII-V6 là robot hàn c a công tiủ OTC Daihen Nh t B nậ ả ,m t công ti chuyênộ
s n ảxu t các thi t b hàn,thi t b c t,robot hàn công nghi p có đ chính xác cao.ấ ế ị ế ị ắ ệ ộ Dòng Robot OTC
Daihen AII-V6 đ c trang b b đi u khi n AX21, s d ng cho các ng d ng hàn TIG/MIG/MAG/CO2ượ ị ộ ề ể ử ụ ứ ụ
và các ng d ng c t Plasma.ứ ụ ắ
III. H TH NG S N XU T LINH HO T FMSỆ Ố Ả Ấ Ạ
Trong nên công nghiêp hoa hiên đai hoa hiên nay, công nghê san xuât đa phat triên rât manh.môt thanh phân 3
không thê thiêu cua nên công nhiêp nay la hê thông san xuât linh hoat FMS
Hê thông san xuât linh hoat FMS(Flexible Manufacturing System) la hê thông đ c san xuât đ c điêu kiên ươ ươ
t đông băng may tinh,co kha năng thay đôi ch nh trinh điêu kiên va san phâm môt cach linh hoat trong quaư ươ
trinh san xuât.
Bên canh khai niêm FMS con co khai niêm san xuât co s tr giup cua may tinh CIM(Computer Integrated ư ơ
Manufacturing) đ c s đung đê mô ta môt ph ng th c san xuât hiên đai.Măc du CIM ch a nhiêu côngươ ư ươ ư ư
nghê san xuât tiên tiên nh CAD/CAM/CNC/ROBOT…nh ng no đ c hiêu v i cai nghia la công nghê m i ư ư ươ ơ 3 ơ
h n la môt khai niêm m i.ơ ơ
Trong bai bao cao nay tôi xin trinh bay vê mô hinh “ TRAM PHÂN PHÔI VÂT GIA CÔNG ”
Môt mô hinh thê hiên phân nao cua hê thông san xuât linh hoat FMS.Mô hinh nay đ c san xuât b i công ti ươ ơ
“TNHH đ u t phát tri n công ngh đi n t t đ ng hoá DK”.ầ ư ể ệ ệ ử ự ộ
PH N I Ầ
Đ C ĐI M C B N C A H TH NG ROBOT CÔNG NGHI P Ặ Ể Ơ Ả Ủ Ệ Ố Ệ
VÀ H TH NG S N XU T LINH HO T FMSỆ Ố Ả Ấ Ạ
A. ROBOT CÔNG NGHI PỆ
I. C U T O H TH NGẤ Ạ Ệ Ố
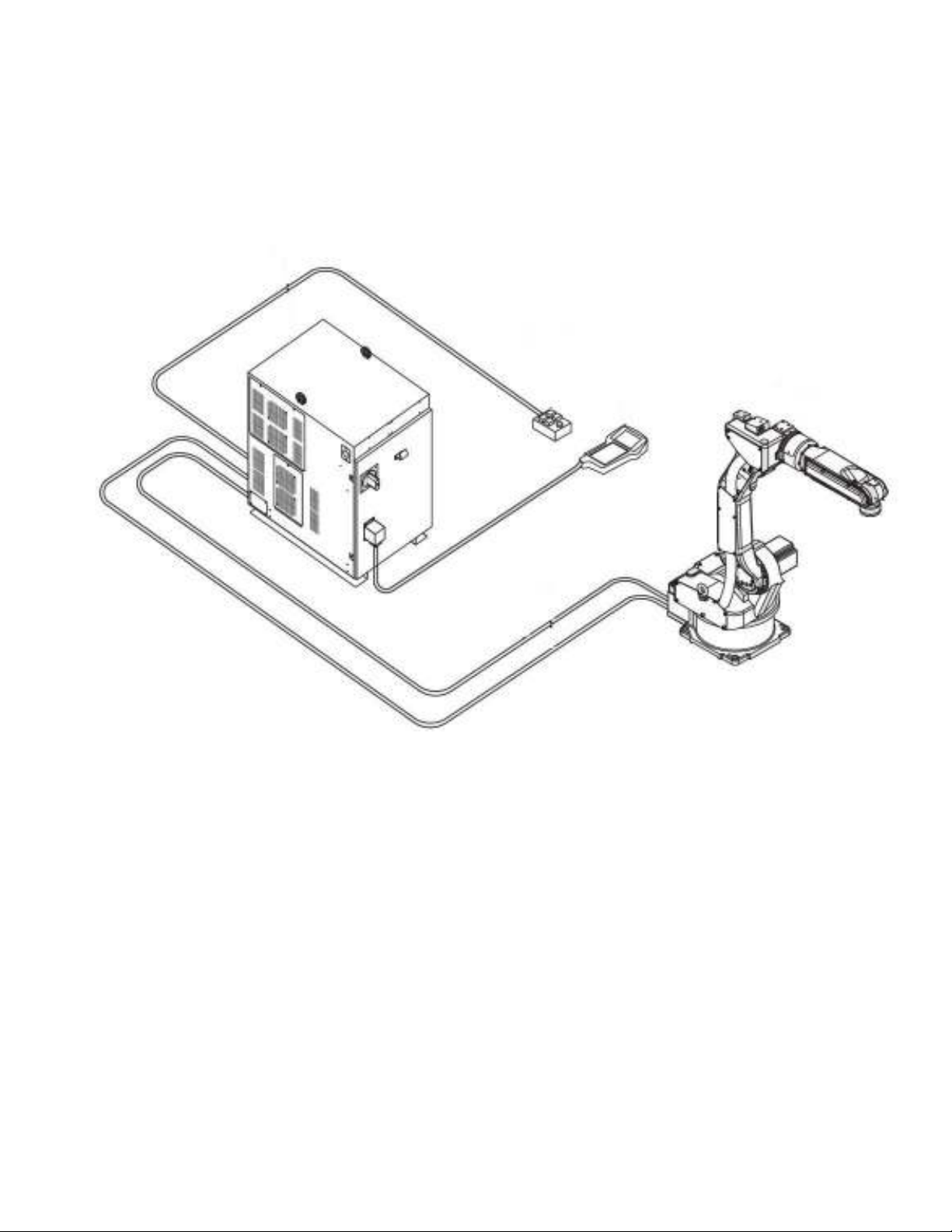
H th ng c b n g m 3 ph n:ệ ố ơ ả ồ ầ
1. Cánh tay robot (Manipulator)
C c u c khí ơ ấ ơ ROBOT g m 6 khâu đ ng 6 kh p t o ra m t c c u có 6 b t t do.ồ ộ ớ ạ ộ ơ ấ ậ ự Ở
6 kh p là 6 đ ng c servo v i các kích th c và công su t khác nhau.ớ ộ ơ ớ ướ ấ
2. B đi u khi n AX21 (ộ ề ể Controller AX21)
B đi u khi n g m h p cpu AX21 v i các c ng ra là h p đi u ki n b ng tay (Teach pendant) và h pộ ề ể ồ ộ ớ ổ ộ ề ể ằ ộ
thu t toán (Operation Box).ậ

3. Thi t b hàn h quangế ị ồ
Thi t b hàn bao g m: súng hàn đ c g n vào khâu cu i c a cánh tay robot,b ph n đi u khi n khíế ị ồ ươ ắ ố ủ ộ ậ ề ể
hàn, ngu n hàn DTC-DM350 ,bình khí hàn và h th ng đây hàn.ồ ệ ố
II. NGUYÊN LÍ HO T ĐÔNG C A H TH NGẠ Ủ Ệ Ố
D u tiên,h th ng s nh n đ c các l nh di u khi n t h p đi u ki n b ng tay và h p thu tầ ệ ố ẽ ậ ượ ệ ề ể ừ ộ ề ể ằ ộ ậ
toán,cpu s nh n l nh đó và x lí nó.Sau đó đ a ra các l nh đi u ki n các đ ng c servo và h th ngẽ ậ ệ ử ư ệ ề ể ộ ơ ệ ố
hàn đ có đ c m t đ ng hàn theo ý mu n.các đ ng c servo đ c đi u khi n các góc quay r t chínhể ượ ộ ườ ố ộ ơ ượ ề ể ấ
xác,s k t h p đ ng th i c a các đ ng c đó s t o cho qu đ o chuy n đ ng c a d u súng hàn đ cự ế ợ ồ ờ ủ ộ ơ ẽ ạ ỹ ạ ể ộ ủ ầ ượ
theo ý mu n.ố
III. PH M VI NG D NG C A H TH NGẠ Ứ Ụ Ủ Ệ Ố
Ngày nay robot công nghi p đ c ng d ng r t r ng rãi, đ c bi t là trong n n công nhi p s nệ ượ ứ ụ ấ ỗ ặ ệ ề ệ ả
xu t s n ph m tiêu dùng.Theo thông kê cho th y ấ ả ẩ ấ robot công nghi p ch y u là robot hàn và robot l pệ ủ ế ắ
ráp,trong đó robot hàn chi m 25%,robot l p ráp chi m 33% dân s robot trên th gi i .ế ắ ế ố ế ớ H th ngệ ố
Robot hàn OTC Daihen AII-V6 đ c ượ ng d ng trong hàn TIG/MIG/MAG/CO2 và các ng d ng c tứ ụ ứ ụ ắ
Plasma,ngoài ra h th ng có th đ c ng d ng đ nâng các đ v t.ệ ố ể ượ ứ ụ ể ồ ậ OTC Daihen AII-V6 có th đ cể ượ
trang b cho dây chuy n s n xu t otị ề ả ấ o,xe máy,các s n ph m c khí… t đ ng .V i đ c thù c a côngả ẩ ơ ự ộ ớ ặ ủ
vi c hàn là r t nguy hi m,đ c h i và đòi h i s chính xác cao nên robot hàn là m t gi i pháp thay thệ ấ ể ộ ạ ỏ ự ộ ả ế
c n thi t cho vi c hàn th công.ầ ế ệ ủ
B. HÊ THÔNG SAN XUÂT LINH HOAT FMS
I. C U T O H TH NGẤ Ạ Ệ Ố
Hê thông tram phân phôi vât gia công bao gôm:
1.Cac thiêt bi vân chuyên va thao lăp chi tiêt gôm thông gôm 2 băng tai truyên ,1 vanh xoay tron co cac
ranh tru đê ch a vât gia công,1 canh tay robot găp cac vât gia công va hê thông pitong đây cac vân gia3 ư
công.
2.May công cu gôm 3 may gia công may khoa vât gia công,may tiên va may phay.
3. Hê thông đô ga:do chi d ng lai mô hinh nên hê thông không co đô ga đê kep chi tiêt ma thay vao đo ư ơ
la cac ranh tru trên vanh xoay dê gi cac vât gia công 3 ư3
4. Cac thiêt bi căt gôm cac mui khoan,dao phay hay dao tiên. 3
5.hê thông cac may tinh ,hê điêu kiên PLC va cam biên.
II. NGUYÊN LÍ HO T ĐÔNG C A H THÔNGẠ Ủ Ệ
Khi hê thông kh i đông cac băng tai hoat đông.Pitong đâu tiên se hoat đông va đây vât gia công vao ơ 3
băng tai 1,băng tai 1 đ a vât gia công vao vanh quay đê gia công.Trên đ ng di chuyên trên băng tai ư ươ
co 1 sensors mau,sensors nay se g i tinh chât cua vât gia công đo vê bô x li trung tâm.Sau đo bô x li 3 ư ư ư
trung tâm se đ a ra lênh đê diêu khiên ban xoay t i vi khi may gia công cân thiêt cho vât gia công đo3 ư ơ
,qua cac lênh cua cpu cac may công cu se gia công thêo tinh chât cua vât gia công.Sau khi gia công,ban 3
xoay se đ a vât gia công đên vi tri robot va robot găp vât gia công rôi nha vao băng truyên 2.Trên băng3 ư
truyên 2 co 3 sensors va d i 3 sensors co 3 pitong đây vât gia công xuông buông ch a san phâm.Khi ươ ư
vât gia công đi qua sensors th nhât la sensors mau,hê băng truyên se d ng lai,sensors tiên hanh kiêm ư 3 ư
tra tinh chât cua vât gia công va g i vê cpu cpu x li tin hiêu vât gia công rôi đ a ra tinh chât cua vât ư ư ư
gia công.Sau đo nêu vât gia công thoa man tinh chât nao đo thi cpu se ra lênh cho pitong đây vât gia 3 3
công xuông buông san phâm,nêu không thi hê thông băng truyên se tiêp tuc hoat đông va đên cac 3
sensors sau.Sau qua trinh nh thê hê thông se gia công đ c san phân va tiên hanh phân loai no theo ư 3 ươ
tinh chât.
III. PHAM VI NG DUNG CUA HÊ THÔNG Ư
Hê thông co thê đ c ap dung cho dây chuyên gia công cac san phâm co tinh chât khac nhau va ươ
phân loai cac san phâm đo.Đây chi la mô hinh nh ng vê c ban thi no co nguyên li cung nh cac ư ơ 3 ư
thanh phân hoan toan t ng t nh dây chuyên san xuât th c tê. ươ ư ư ư
PH N IIIẦ
PHÂN TÍCH CÁC TÍNH NĂNG VÀ THÀNH PH N C B N C AẦ Ơ Ả Ủ
H TH NGỆ Ố
A.H TH NG ROBOT CÔNG NGHI PỆ Ố Ệ
I.H TH NG C KHÍ Ệ Ố Ơ 1
2
3
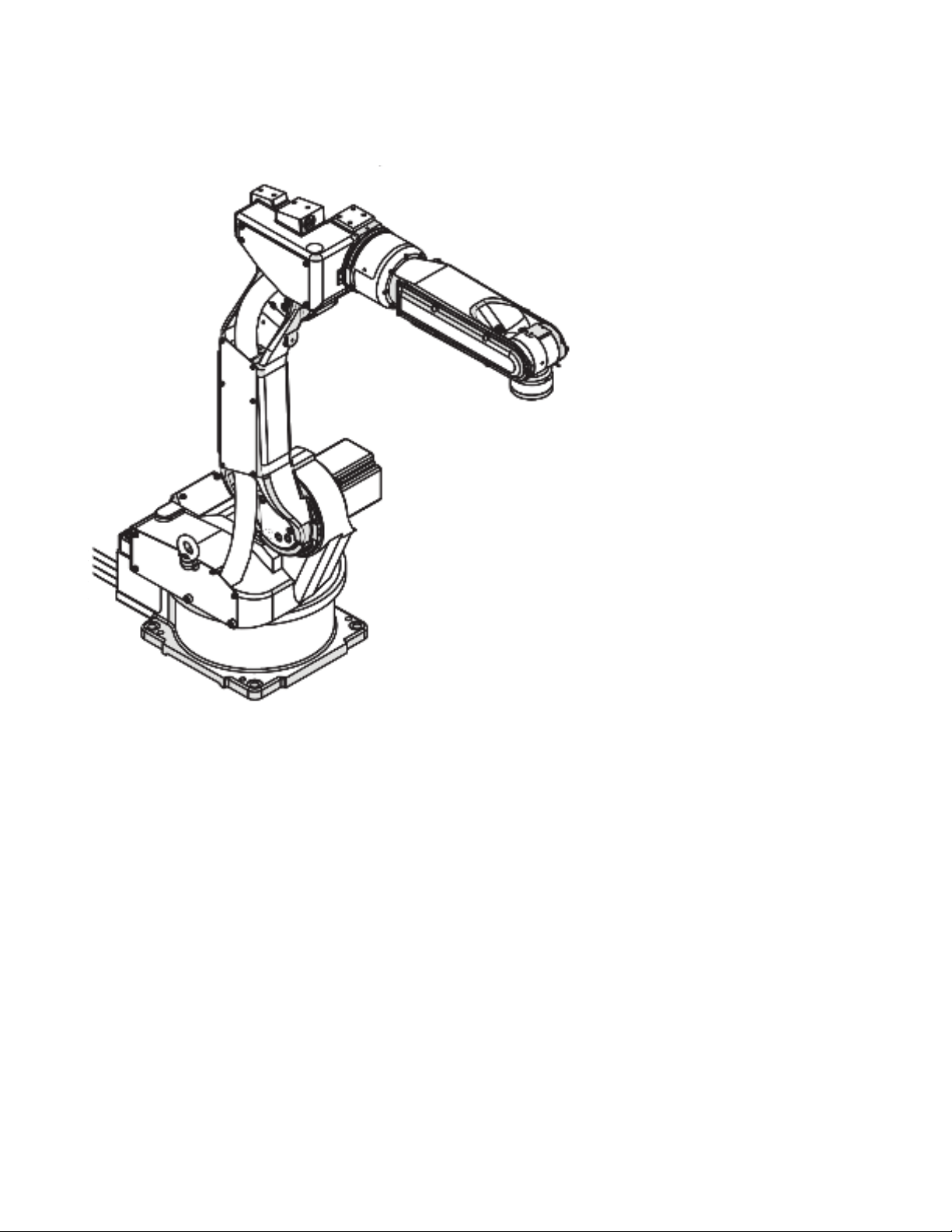
Hê thông c khi đ n gian chi gôm 6 khâu đông,1 khâu c ng va 6 kh p (hinh ve).khâu c ng (khâu 3) la ơ ơ ư ơ 3 ư
phân đ c găn tr c tiêp vao nên va khâu nay không di chuyên.vi tri kh p 2 la vi tri nôi khâu cuôi cua robot ươ ươ ơ
va trên khâu cuôi nay đ c găn sung han.toan bô c câu hoat đông se đinh vi cho đâu sung han di chuyên ươ ơ 3
theo môt quy đao xac đinh,qua đo co thê tao ra cac đ ng han theo mong muôn.vi tri 1 dê găn bô điêu chinh ươ
han va bô phân nay la bô phân trung gian đ c nôi v i sung han ,nguôn han va cpu. ươ ơ
Kich th c cac khâu va gi i han không gian lam viêc cua c câu robot: ươ ơ ơ




![Sử dụng Ethernet cho máy móc và robot [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130623/sea123123/135x160/1504768_259.jpg)


















![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)