Robotics
ng d ng Maple trong tính toán rô b tỨ ụ ố
1. X lý file và th hi n s li uử ể ệ ố ệ
-T o 1 th m c (folder) đ làm vi cạ ư ụ ể ệ
-L u 1 file maple (ví d : xulyfile.mw) vào th m c trênư ụ ư ụ
-Ch ng trình ch y s t đ ng t o file trong th m c nàyươ ạ ẽ ự ộ ạ ư ụ
-D li u th ng l u tr d ng file text (.txt) d đ c và x lý, s li u l u đ n gi n d ng ma tr n s ,ữ ệ ườ ư ữ ạ ễ ọ ử ố ệ ư ơ ả ạ ậ ố
l y d li u ra d ng ma tr n s và x lý ma tr n s này.ấ ữ ệ ạ ậ ố ử ậ ố
1. X lý fileử
-M file d li u, vi t d li u, l u d li u.ở ữ ệ ế ữ ệ ư ữ ệ
-M file d li u, đ c d li u (l y d li u t file l u tr )ở ữ ệ ọ ữ ệ ấ ữ ệ ừ ư ữ
1.1.X lý file văn b nử ả
Nguyên t c: T o file m i (m file)->Ghi d li u lên file->Đóng fileắ ạ ớ ở ữ ệ
L nh m file:ệ ở fopen
C th : HEPLụ ể
fopen(name, mode)
fopen(name, mode, type)
Vi t lên file:ế fprintf
C th : HEPLụ ể
Đóng file: close
Ví d :ụ
>fh := fopen("xuly.txt", WRITE)
>fprintf(fh, "x=%d,y=%d", 1, 2)
>fclose(fh)
1.2.X lý file d ng sử ạ ố
Nguyên t c: T o file m i (m file)->Ghi d li u lên file->Đóng fileắ ạ ớ ở ữ ệ
L nh m file:ệ ở fopen
Vi t d li u d ng s lên file:ế ữ ệ ạ ố writedata
L nh đ c d li u:ệ ọ ữ ệ readdata
L nh đóng fileệ: fclose
Ví d vi t d li u:ụ ế ữ ệ
>A := matrix([[1, 2, 3, 90], [6, 8, 80, 56], [1, 5, 8, 3]])
>fh := fopen("matrandulieu.txt", WRITE)
>writedata(fh, A, float)
>fclose(fh)
Mu n m và l u file vào th m c khác:ố ở ư ư ụ
fh := fopen("D:/study/fileMOI.txt", WRITE)
fclose(fh)
Ví d đ c d li u:ụ ọ ữ ệ
> fh := fopen("matrandulieu.txt", READ);
0

> datalayra := readdata(fh, float, 4);
[[1., 2., 3., 90.], [6., 8., 80., 56.], [1., 5., 8., 3.]]
> datalayra;
[[1., 2., 3., 90.], [6., 8., 80., 56.], [1., 5., 8., 3.]]
> datalayra[1, 1];
1.
> fclose(fh);
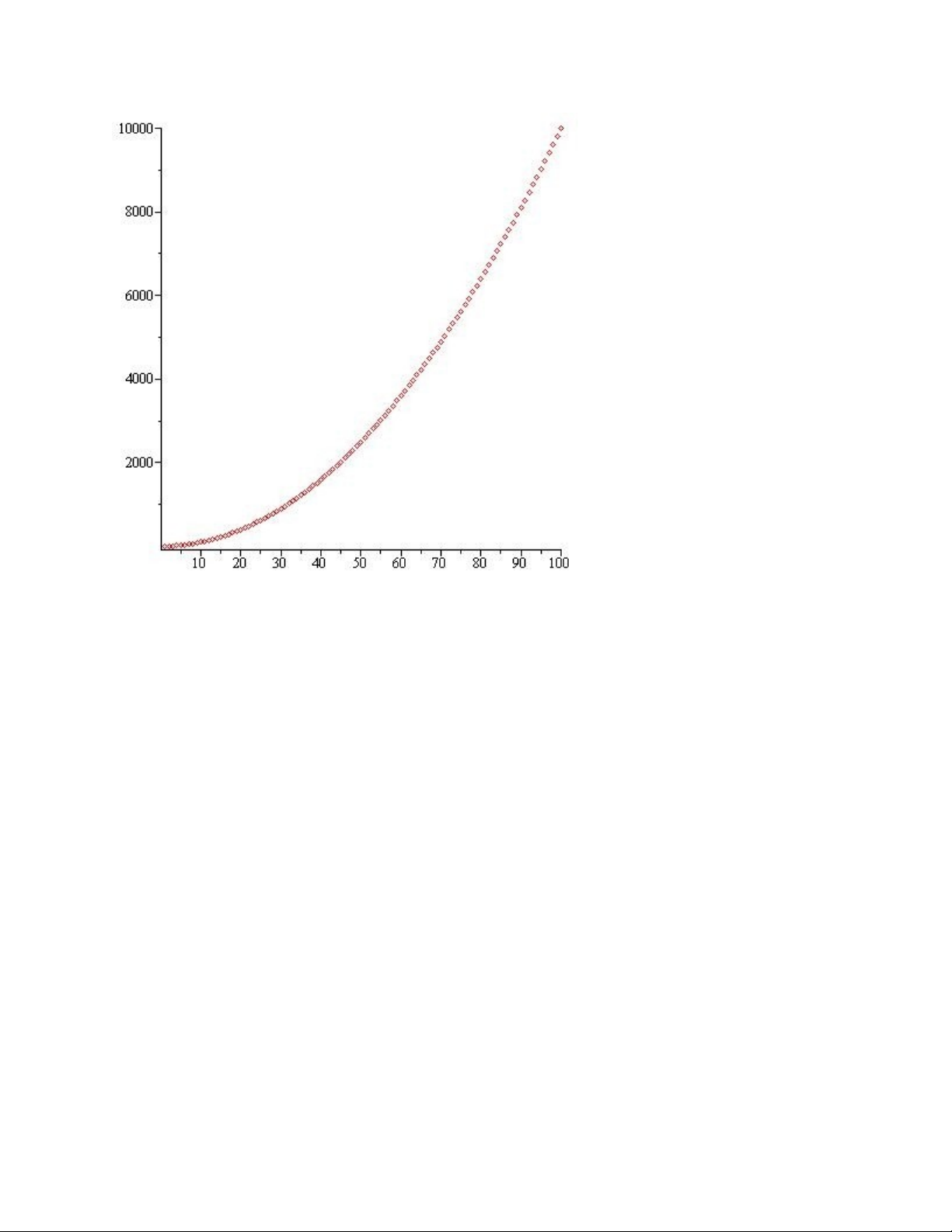
2. Hi n th s li u d ng sể ị ố ệ ạ ố
2.1 T o file d li uạ ữ ệ
Ví d :ụ
> matran := matrix(100, 2);
> for i from 1to 100 by 1 do
matran[i, 1] := i:
matran[i, 2] := i^2:
end do;
> fh := fopen("thehiensolieu.txt", WRITE);
0
> writedata(fh, matran, integer);
> fclose(fh);
2.2 Th hi n d li uể ệ ữ ệ
- đ c file: readdataọ
fh := fopen("thehiensolieu.txt", READ)
-L u thành ma tr nư ậ
matransolieu := readdata(fh, integer, 2)
-V đ th các đi m riêng rẽ ồ ị ể ẽ
> points := {seq([matransolieu[i, 1], matransolieu[i, 2]], i = 1 .. 100)};
> pointplot(points, color = red, thickness = 3);
II. H NG D N GI I PH NG TRÌNH Đ NG H C B NG MAPLEƯỚ Ẫ Ả ƯƠ Ộ Ọ Ằ
1. Khai báo th vi n s d ngư ệ ử ụ
with(linalg);
with(VectorCalculus);
with(LinearAlgebra);
with(plots);
with(plottools):
2. Thi t l p ph ng trình đ ng h cế ậ ươ ộ ọ
-B ng cách gán ma tr n tr ng thái khâu thao tác A theo t a đ thao tácằ ậ ạ ọ ộ
p=[xE,yE,zE,rotx,roty,rotz]T và ma tr n tr ng thái khâu thao tác A theo c u trúc đ ngậ ạ ấ ộ
h c q=[q1,q2,zE,…,qn]T. Ta đ c ph ng trình đ ng h c.ọ ượ ươ ộ ọ
-Sau đây là 1 ví d ph ng trình đ ng h c:ụ ươ ộ ọ
f1:=0.28-(.61*(cos(q2)*cos(q3)-sin(q2)*sin(q3)))*cos(q4)*sin(q5)+(.61*(-cos(q2)*sin(q3)-
sin(q2)*cos(q3)))*cos(q5)-.86*cos(q2)*sin(q3)-.86*sin(q2)*cos(q3)+.7*cos(q2)-xE:
f2:=-0.61*(cos(q2)*sin(q3)+sin(q2)*cos(q3)))*cos(q4)*sin(q5)+(.61*(cos(q2)*cos(q3)-
sin(q2)*sin(q3)))*cos(q5)-.86*sin(q2)*sin(q3)+.86*cos(q2)*cos(q3)+.7*sin(q2)-yE:
f3:=-0.61*sin(q4)*sin(q5)+q1-zE:
f4:=-((cos(q2)*cos(q3)-sin(q2)*sin(q3))*cos(q4)*cos(q5)+(-cos(q2)*sin(q3)-
sin(q2)*cos(q3))*sin(q5))*sin(q6)-(cos(q2)*cos(q3)-
sin(q2)*sin(q3))*sin(q4)*cos(q6)+cos(roty)*sin(rotz):
f5:=(cos(q2)*sin(q3)+sin(q2)*cos(q3))*cos(q4)*sin(q5)-(cos(q2)*cos(q3)-

sin(q2)*sin(q3))*cos(q5)+sin(rotx)*cos(roty):
f6:=sin(q4)*cos(q5)*cos(q6)+cos(q4)*sin(q6)+cos(rotx)*sin(roty)*cos(rotz)-sin(rotx)*sin(rotz):
f := [f1, f2, f3, f4, f5, f6]:
3. Gi i bài toán thu nả ậ
3.1. Đ u vào bài toán thu nầ ậ
- Cho tr c q=[q1,q2,q3,…,qn]T (chú ý sv cho ph i phù h p v i c u hình)ướ ả ợ ớ ấ
Ví d :ụ
q1:=1+0.8*sin(Pi/4*t):
q2:=-0.5+0.2*sin(Pi/5*t):
q3:=0.3-0.5*sin(Pi/6*t):
q4:=0.2+0.3*sin(Pi/3*t):
q5:=-0.4-0.3*sin(Pi/4*t):
q6:=0.1+0.4*sin(Pi/5*t):
q := [q1, q2, q3, q4, q5, q6];
-Bi n (đ u ra bài toán thu n)ế ầ ậ
unknow := [xE, yE, zE, rotx, roty, rotz];
3.2. Cách gi iả
- Tìm nghi m đ uệ ầ unknowinit
qinit := evalf(subs(t = 0, q));
f0 := evalf(subs(t = 0, f));
unknow0 := solve(f0, unknow);
assign(unknow0[10]);
unknowinit := [xE, yE, zE, rotx, roty, rotz];
unassign('xE', 'yE', 'zE', 'rotx', 'roty', 'rotz');
-Dùng thu t gi i NewtonRaphson đ gi iậ ả ể ả
read "NewtonRS.txt";
L := 100:
nghiemthuan := matrix(L, 6):
nghiemthuan[1, 1] := unknowinit[1]:
nghiemthuan[1, 2] := unknowinit[2]:
nghiemthuan[1, 3] := unknowinit[3]:
nghiemthuan[1, 4] := unknowinit[4]:
nghiemthuan[1, 5] := unknowinit[5]:
nghiemthuan[1, 6] := unknowinit[6]:
for i from 1 to L-1 by 1 do
Eqts := subs(t = VectorCalculus[`*`](.1, i), f):
jaco := jacobian(f, unknow):
y := Newton_Raphson(Eqts, jaco, unknow, unknowinit):
nghiemthuan[i+1, 1] := evalf(y[1]):
nghiemthuan[i+1, 2] := evalf(y[2]):

nghiemthuan[i+1, 3] := evalf(y[3]):
nghiemthuan[i+1, 4] := evalf(y[4]):
nghiemthuan[i+1, 5] := evalf(y[5]):
nghiemthuan[i+1, 6] := evalf(y[6]):
end do:
-L u k t qu bài toán thu n (l u thành c t” xE yE zE rotx roty rotz”)vàoư ế ả ậ ư ộ
file nghiembaitoanthuan.txt
fh := fopen("nghiembaitoanthuan.txt", WRITE);
writedata(fh, nghiemthuan, float);
fclose(fh);
-Đ c d li uọ ữ ệ
fh := fopen("nghiembaitoanthuan.txt", READ);
vethuan := readdata(fh, float, 6);
fclose(fh);
-L p t a đ đi m tác đ ng cu i theo th i gian tậ ọ ộ ể ộ ố ờ
pointxE := [seq(0.1*i, vethuan[i, 1]], i = 1 .. 100)]:
pointyE := [seq(0.1*i, vethuan[i, 2]], i = 1 .. 100)]:
pointzE := [seq(0.1*i, vethuan[i, 3]], i = 1 .. 100)]:
-V t a đ đi m tác đ ng cu i (thành ph n t a đ và t a đ 3D)ẽ ọ ộ ể ộ ố ầ ọ ộ ọ ộ
point1 := pointplot(pointxE, color = red, legend = "xE");
point2 := pointplot(pointyE, color = green, legend = "yE");
point3 := pointplot(pointzE, color = blue, legend = "zE");
display({point1, point2, point3});



![Sử dụng Ethernet cho máy móc và robot [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130623/sea123123/135x160/1504768_259.jpg)



















![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)