NGÂN HÀNG CÂU H I MÔN ROBOT CÔNG NGHI PỎ Ệ
A. PH N CÂU H I LÝ THUY TẦ Ỏ Ế
Ch ng 1: Các khái ni m c b n và phân lo i robot công nghi pươ ệ ơ ả ạ ệ
Câu 1: Phân bi t hai khái ni m robot và robotics?ệ ệ
Câu 2: Trình bày khái ni m robot công nghi p?ệ ệ
Câu 3: Trình bày c u trúc chung c a m t robot công nghi p?ấ ủ ộ ệ
Câu 4: Nêu các d ng ch y u c a robot công nghi p trong th c t ?ạ ủ ế ủ ệ ự ế
Câu 5: Phân lo i robot công nghi p?ạ ệ
Câu 6: Trình bày các ng d ng ch y u c a robot công nghi p trong th c t ?ứ ụ ủ ế ủ ệ ự ế
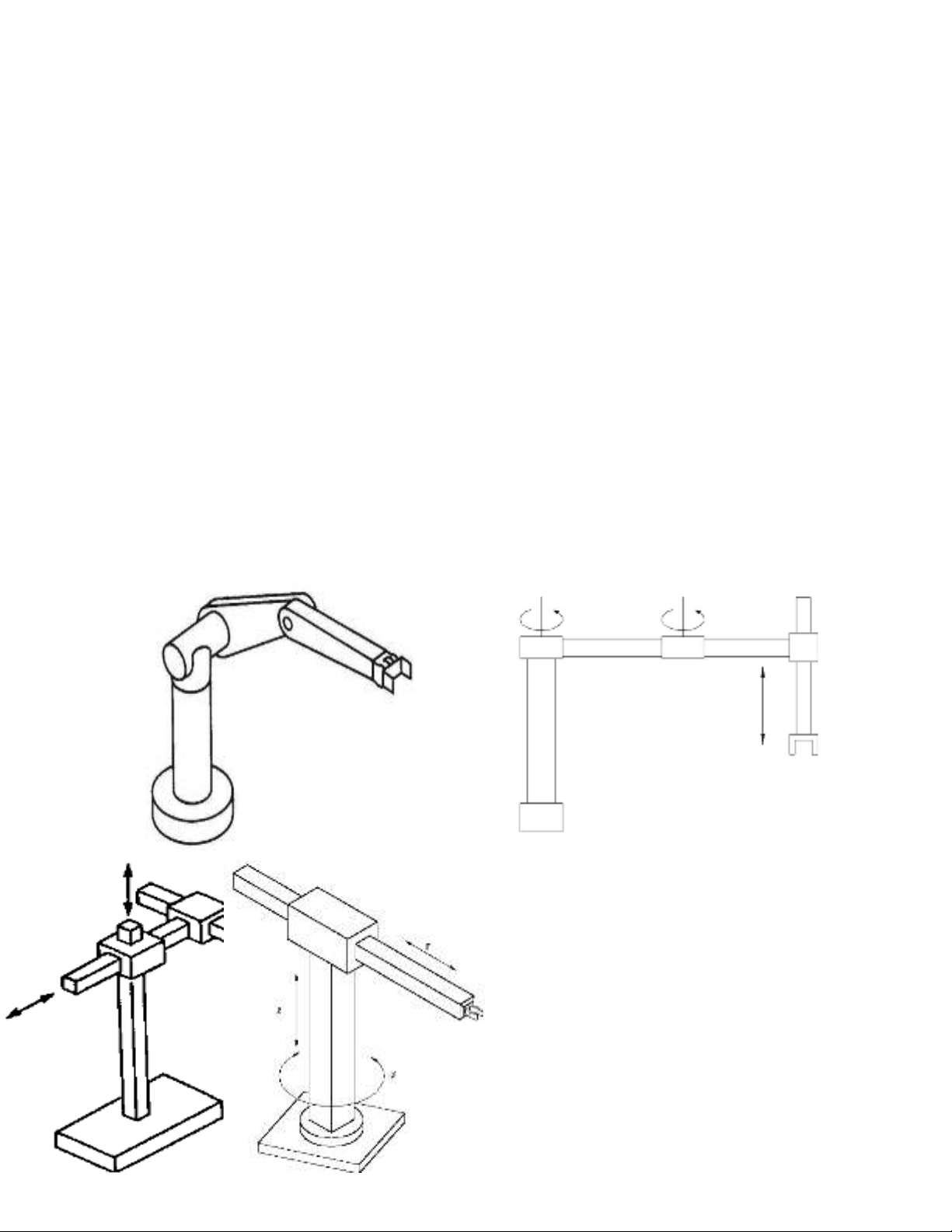
Câu 7: Mô t không gian làm vi c c a các tay máy sau? Tay máy d ng này đc xả ệ ủ ạ ượ ử
d ng trong nh ng tr ng h p nào?ụ ữ ườ ợ

Ch ng II Đng h c tay máyươ ộ ọ
Câu 1: Các h t a đ đc s d ng trong robot công nghi p?ệ ọ ộ ượ ử ụ ệ
Câu 2: Phát bi u quy t c bàn tay ph i xác đinh ph ng, chi u c a các h t a để ắ ả ươ ề ủ ệ ọ ộ
trong robot công nghi p?ệ
Câu 3: Trình bày các khái ni m đnh v và đnh h ng trên robot công nghi p?ệ ị ị ị ướ ệ
Câu 4: Ma tr n quay là gì? Trình bày cách xác đnh ma tr n quay c a khâu công tácậ ị ậ ủ
trên robot công nghi p?ệ
Câu 5: Trình bày tác d ng c a phép bi n đi thu n nh t trong vi c nghiên c uụ ủ ế ổ ầ ấ ệ ứ
đng h c tay máy robot công nghi p?ộ ọ ệ
Câu 6: Trình bày c u trúc c a ma tr n bi n đi thu n nh t và ph ng pháp xâyấ ủ ậ ế ổ ầ ấ ươ
d ng ma tr n bi n đi thu n nh t gi a các h tr c t a đ?ự ậ ế ổ ầ ấ ữ ệ ụ ọ ộ
Câu 7: Các tr ng h p riêng c a phép bi n đi thu n nh t ? Xây d ng các ma tr nườ ợ ủ ế ổ ầ ấ ự ậ
bi n đi thu n nh t cho t ng tr ng h p đó?ế ổ ầ ấ ừ ườ ợ
Câu 8: Ph ng trình đng h c tay máy là gì? Các ph ng pháp xây d ng ph ngươ ộ ọ ươ ự ươ
trình đng h c robot công nghi p?ộ ọ ệ
Câu 9: Trình bày phép bi n đi thu n nh t các h tr c t a đ theo quy t c Denavitế ổ ầ ấ ệ ụ ọ ộ ắ
– Hartenberg? u đi m c a phép bi n đi các h tr c t a đ theo quy t c DenavitƯ ể ủ ế ổ ệ ụ ọ ộ ắ
– Hartenberg so v i phép bi n đi thu n nh t các h tr c t a đ t ng quát?ớ ế ổ ầ ấ ệ ụ ọ ộ ổ
Câu 10: Nêu quy t c đt các h tr c t a t a đ theo Denavit – Hartenberg?ắ ặ ệ ụ ọ ọ ộ
Câu 11: Nêu quy t c xác đnh các thông s đng h c c a b ng D-H?ắ ị ố ộ ọ ủ ả
Câu 12: Trình bày các b c l p ph ng trình đng h c robot công nghi p theo quyướ ậ ươ ộ ọ ệ
t c Denavit – Hartenberg?ắ
Câu 13: Bài toán đng h c ng c tay máy là gì? Vi c gi i bài toán đng h cộ ọ ượ ệ ả ộ ọ
ng c tay máy có ý nghĩa nh th nào trong đi u khi n robot công nghi p?ượ ư ế ề ể ệ
Câu 14: Phân bi t hai khái ni m nghi m toán và nghi m v t lý c a bài toán đngệ ệ ệ ệ ậ ủ ộ
h c ng c tay máy?ọ ượ

Câu 15: Trình bày bài toán đng h c ng c tay máy cho c c u 3 khâu ph ng?ộ ọ ượ ơ ấ ẳ
Câu 16: Trình bày bài toán đng h c ng c tay máy cho c c u 3 khâu c u?ộ ọ ượ ơ ấ ầ
Ch ng III Đng l c h c tay máyươ ộ ự ọ
Câu 1: Bài toán đng l c h c tay máy là gì? Vi c gi i quy t bài toán đng l c h cộ ự ọ ệ ả ế ộ ự ọ
tay máy có ý nghĩa nh th nào trong thi t k và đi u khi n robot công nghi p?ư ế ế ế ề ể ệ
Câu 2: Nêu các ph ng pháp gi i bài toán đng h c ng c tay máy? ươ ả ộ ọ ượ
Câu 3: Trình bày ph ng pháp Lagrange trong vi c gi i bài toán đng l c h c tayươ ệ ả ộ ự ọ
máy?
Câu 4: Trình bày ph ng pháp Newton – Euler trong vi c gi i bài toán đng l cươ ệ ả ộ ự
h c tay máy?ọ
Ch ng IV: C s đi u khi n robotươ ơ ở ề ể
Câu 1: Qu đo chuy n đng c a tay máy là gì? Khi nào thì c n quan tâm đn vi cỹ ạ ể ộ ủ ầ ế ệ
đi u khi n tay máy robot theo qu đo?ề ể ỹ ạ
Câu 2: Nh ng tr ng h p nào sau đây c n quan tâm đn vi c thi t k quy đo choữ ườ ợ ầ ế ệ ế ế ạ
khâu công tác c a robot công nghi p và vì sao?ủ ệ
- Robot hàn đi mể
- Robot hàn đngườ
- Robot l p rápắ
- Robot phun s nơ
- Robot phân lo i s n ph mạ ả ẩ
Câu 3: Nêu các ph ng pháp thi t k và đi u khi n robot công nghi p theo quươ ế ế ề ể ệ ỹ
đo?ạ
Câu 4: Trình bày ph ng pháp thi t k qu đo cho khâu công tác c a robot côngươ ế ế ỹ ạ ủ
nghi p trong không gian kh p?ệ ớ
Câu 5: Trình bày ph ng pháp thi t k qu đo cho khâu công tác c a robot côngươ ế ế ỹ ạ ủ
nghi p trong không gian công tác?ệ

Câu 6: Trình bày m i quan h gi a bài toán đng h c ng c tay máy và bài toánố ệ ữ ộ ọ ượ
thi t k qu đo chuy n đng c a robot công nghi p?ế ế ỹ ạ ể ộ ủ ệ
Ch ng V Các h th ng đi n hình c a robot công nghi pươ ệ ố ể ủ ệ
Câu 1: Nêu các h th ng đi n hình c a robot công nghi p? (có v s đ minh h a)ệ ố ể ủ ệ ẽ ơ ồ ọ
Câu 2: Trình bày c u trúc chung và các thành ph n c a h th ng ch p hành trênấ ầ ủ ệ ố ấ
robot công nghi p?ệ
Câu 3: Các lo i c m bi n hay đc s d ng trên robot công nghi p? Nêu tác d ngạ ả ế ượ ử ụ ệ ụ
c a các lo i c m bi n đó trong quá trình ho t đng c a robot công nghi p?ủ ạ ả ế ạ ộ ủ ệ
Câu 4: Trình bày c u trúc c a m t h th ng đi u khi n robot công nghi p?ấ ủ ộ ệ ố ề ể ệ
Ch ng VI: C s thi t k robot công nghi pươ ơ ở ế ế ệ
Câu 1: Trình bày các thông s k thu t c a robot công nghi p? Khi s d ng robotố ỹ ậ ủ ệ ử ụ
công nghi p đ hàn đi m cho các m ch đi n t c n quan tâm đn thông s nàoệ ể ể ạ ệ ử ầ ế ố
c a robot công nghi p? Vì sao?ủ ệ
Câu 2: Trình bày các b c đ thi t k m t robot công nghi p?ướ ể ế ế ộ ệ
Câu 3: Trình bày ph ng pháp thi t k robot công nghi p theo t h p modul?ươ ế ế ệ ổ ợ
Ph ng pháp này có u đi m gì so v i ph ng pháp thi t k truy n th ng?ươ ư ể ớ ươ ế ế ề ố
Câu 4: Nêu các d ng k t c u tay k p thông d ng cho robot công nghi p? ạ ế ấ ẹ ụ ệ
Ch ng VII: S d ng robot trong công nghi pươ ử ụ ệ
Câu 1: Nêu các ng d ng đi n hình c a robot công nghi p?ứ ụ ể ủ ệ
Câu 2: Trình bày tác d ng c a robot công nghi p trong m t h th ng s n xu t linhụ ủ ệ ộ ệ ố ả ấ
ho t FMS?ạ
Câu 3: Trình bày bài toán tính toán nhu c u s d ng robot công nghi p s n xu t?ầ ử ụ ệ ả ấ
Câu 4: Trình bày hi u qu kinh t trong vi c s d ng robot công nghi p?ệ ả ế ệ ử ụ ệ
B. PH N BÀI T PẦ Ậ
D ng I:ạ Vi t các ma tr n bi n đi thu n nh t gi a các h tr c t a đ theo quy t cế ậ ế ổ ầ ấ ữ ệ ụ ọ ộ ắ
Denavit – Hartenberg.
D ng II: ạL p ph ng trình đng h c robot công nghi p theo quy t c Devavit –ậ ươ ộ ọ ệ ắ
Hartenberg, cho các giá tr kích th c tay máy, bi n kh p tìm h ng và v trí c aị ướ ế ớ ướ ị ủ
khâu công tác
D ng III:ạ Gi i bài toán đng h c ng c tay máy, tính các giá tr góc quay, l ngả ộ ọ ượ ị ượ
t nh ti n c a các kh p khi cho khâu công tác di chuy n t v trí A sang v trí Bị ế ủ ớ ể ừ ị ị
D ng IV:ạ Tìm quy lu t chuy n đng c a các bi n kh p, v đ th bi u di n thayậ ể ộ ủ ế ớ ẽ ồ ị ể ễ
đi giá tr c a góc quay và l ng t nh ti n m i bi n kh p khi đi u khi n tay máyổ ị ủ ượ ị ế ở ỗ ế ớ ề ể
di chuy n theo qu đoể ỹ ạ
























![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)