HiỂN LED 7 THANH
Giới thiệu chung
LED 7 thanh được dùng nhiều trong các mạch hiện thị thông
báo, hiện thị số, kí tự đơn giản... LED 7 được cấu tạo từ các LED
đơn sắp xếp theo các thanh nét để có thể biểu diễn các chữ số hoặc
các kí tự đơn giản như từ số 0 đến 9 và A đến F chả hạn. LED 7
thanh dùng để hiện số thì rất đẹp và dễ nhìn. Tùy vào kích thước của
số và kí tự mà mỗi thanh được cấu tạo bởi một hay nhiều LED đơn.
Các LED đơn đó được ghép và được đặt tên bằng các chữ cái a...g
và có một dấu chấm dot ( dấu chấm này có thể sáng và tắt tùy theo
yêu cầu) được cấu tạo bởi 1 LED đơn. Qua đó người ta chỉ cần 8 bit
tương ứng với 8 LED đơn để điều khiển được và hiện thị số từ 0 đến
9 và các kí tự từ A đến F
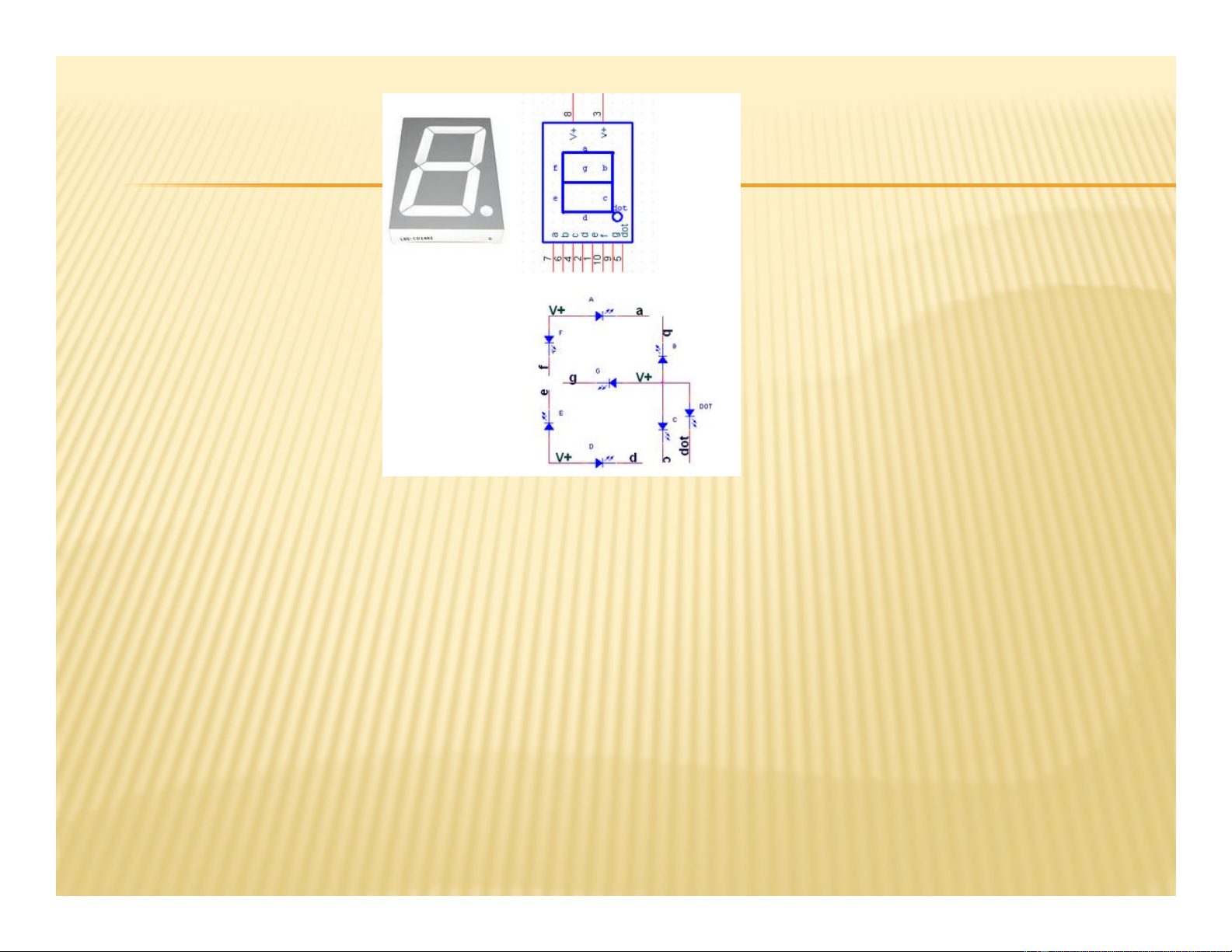
Ở trên là hình dạng LED7 ngoài thực tế và trong mạch nguyên lý và cấu tạo.
Cấu tạo của LED chúng ta nhìn trên rất đơn giản chúng chỉ gồm các LED đơn
được xếp lại với nhau thành hình như trên hình vẽ. Các LED đơn này chỉ chung
nhau Anot hoặc Katot và riêng nhau các chân con lại Anot hặc Katot. Nhiệm vụ
của chúng ta là cho sáng các LED đơn đó để cho nó thành số hay kí tự đơn giản.
Hiện nay LED 7 được sản xuất theo 2 kiểu là Anot chung và Katot chung và được điều
khiển làm việc tương tự như bơm dòng hay nuốt dòng của các LED đơn có trong LED7
(Thường hay thiết kế theo kiểu bơm dòng cho LED). Thông thường trong các mạch
thiết kế thực tế người thiết kế thường hay sử dụng loại Anot chung. Phương pháp
ghép nối là cấp dòng, đảo trạng thái thông qua đệm và quét LED
2 cách ghép nối thường dùng:
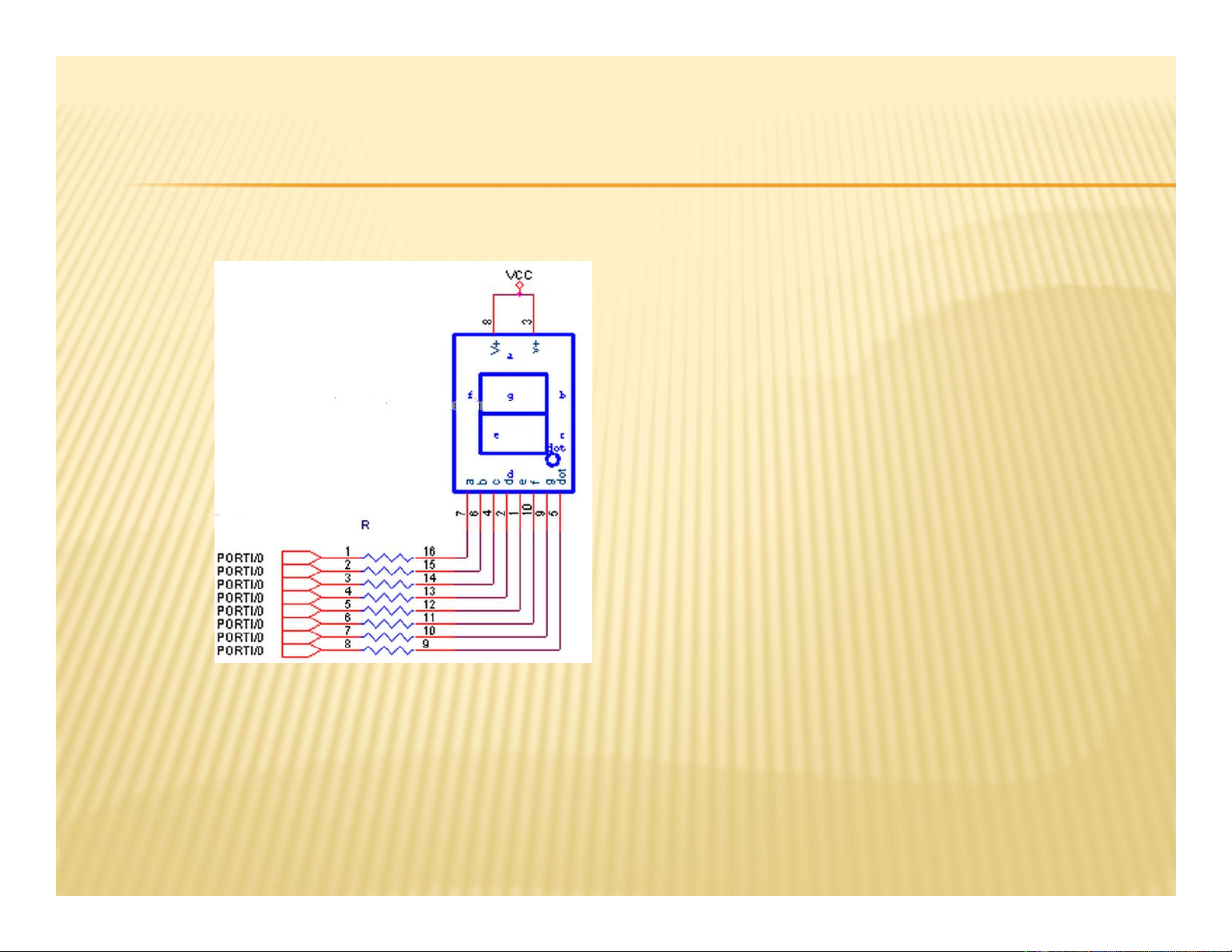
+ Cách 1 : Dùng trực tiếp các chân
điều khiển (vi xử lý) Đối với cách này thì rất tốn chân của vi xử
lý. Và dòng của LED sẽ dồn tất cả về vi xử
lý. Nếu một hệ thống lớn thì cách này
không ổn vì ảnh hưởng đến vi xử lý và
nhiều dòng dồn về vi xử lý sẽ làm vi xử lý
nóng và dẫn tới chết ( chúng ta tưởng
tượng xem nếu mà hệ thống nhiều phần
điều khiển từ các chân vi xử lý mà tất cả
các tải điều khiển dồn trực tiếp dòng về vi
xử lý thì lúc đó dòng trong 1 thời điểm khá
lớn vượt quá ngưỡng cho phép của vi xử
lý.
Dòng mà vi xử lý chịu đựng được cũng khá
nhỏ dưới 100mA ). Các này chỉ dùng được
hệ thống điều khiển ít, mạch dùng vi xử lý
khá đơn giản như hiện thị LED, đếm số từ
0 đến 9 ...
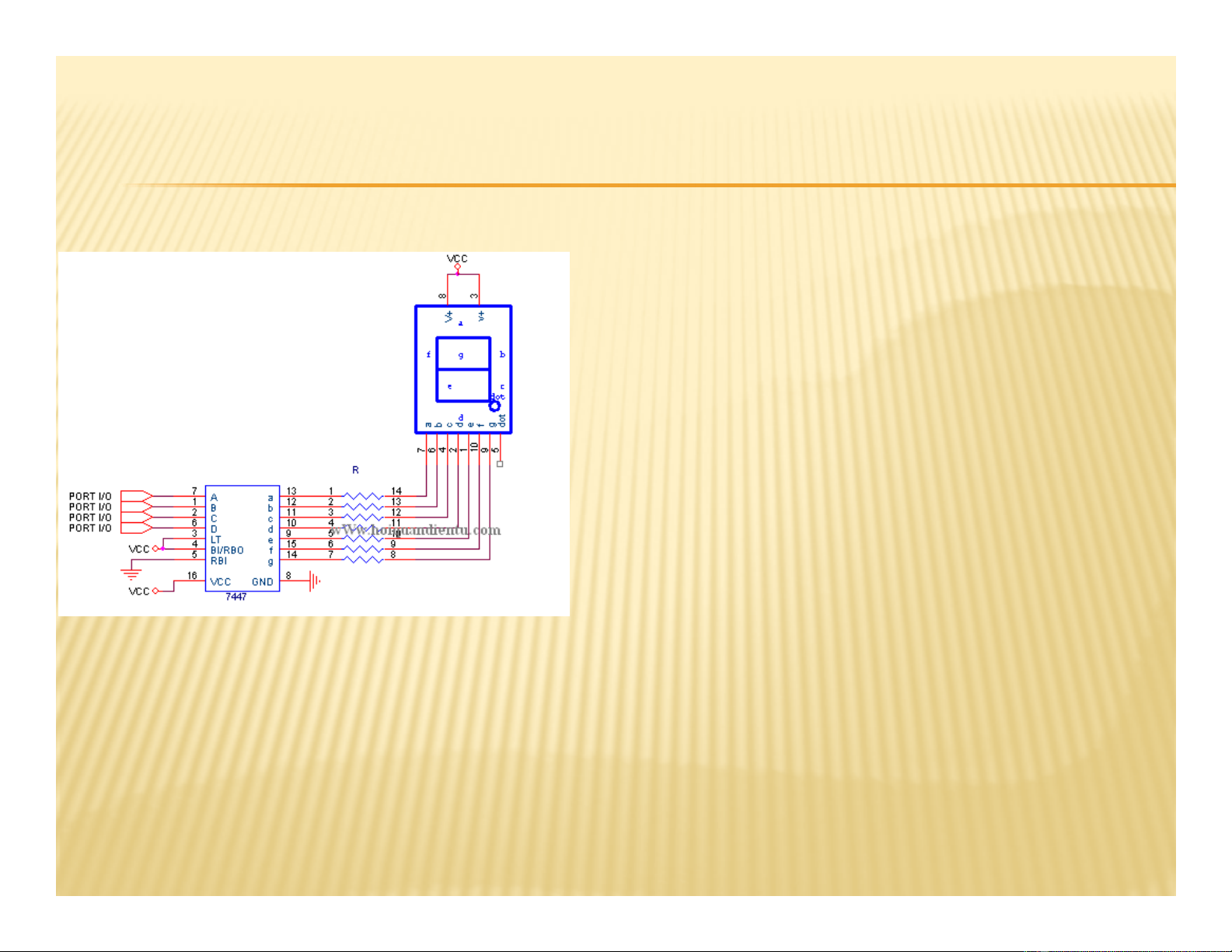
+ Cách 2 : Dùng IC giải mã BCD sang LED 7 thanh
Sử dụng IC giải mã 7447 để giả mã từ mã
BCD sang mã LED7. Đối với cách này vừa
tiếp kiệm được chân vi xử lý và tránh được
dòng dồn về vi xử lý (dòng ở đây được dồn
về 7447). Đây là cách mà người thiết kế
thường dùng trong các hệ thống cần đến
hiện thị.
Thông thường các thiết kế, LED 7 thanh
được dùng để hiện thị các giá trị các giá trị
số từ 0 đến 9 và đôi khi cần phải hiện thị
các kí tự đơn giản như A đến F trong hệ
thống để báo trạng thái của hệ thống. Các
giá trị hiện thị bao gồm nhiều chữ số tức là
chúng ta phải dùng đến nhiều LED7 ghép
lại thì mới hiện thị được nhiều số. Ví dụ
như muốn hiện thị số 123 chẳng hạn thì
chúng ta phải dùng đến 3 LED 7 thanh
ghép lại.


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)