Giới thiệu tài liệu
Trong lĩnh vực kỹ thuật điều khiển tự động, việc hiểu và phân tích các hệ thống phức tạp đòi hỏi một nền tảng vững chắc về mô hình toán học. Chương này giới thiệu các khái niệm cơ bản về mô hình hóa hệ điều khiển liên tục, đặt nền móng cho việc phân tích và thiết kế hệ thống. Bắt đầu với phương trình vi phân như một công cụ mô tả ban đầu, chúng ta sẽ khám phá tầm quan trọng của việc chuyển đổi các hệ vật lý đa dạng thành các biểu diễn toán học để dễ dàng nghiên cứu, từ đó mở ra hướng tiếp cận các phương pháp mạnh mẽ hơn trong lý thuyết điều khiển.
Đối tượng sử dụng
Sinh viên ngành Kỹ thuật điều khiển và Tự động hóa, Kỹ thuật điện, Kỹ thuật cơ khí; kỹ sư và những người nghiên cứu quan tâm đến lý thuyết và ứng dụng mô hình hóa hệ thống điều khiển.
Nội dung tóm tắt
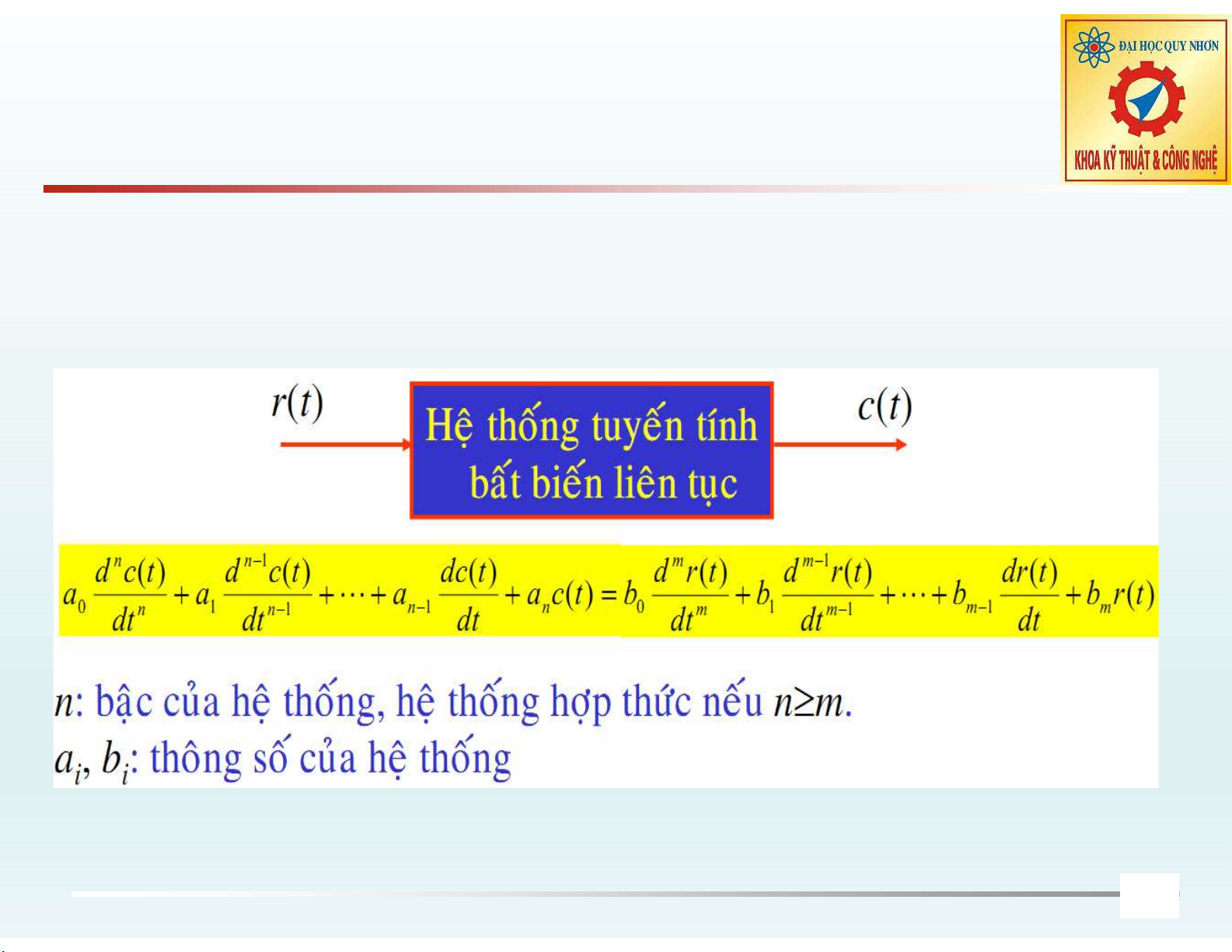
Chương 2 tập trung vào các mô hình toán học cho hệ điều khiển liên tục, bắt đầu bằng việc khái quát hóa sự cần thiết của chúng trong phân tích và thiết kế các hệ thống điều khiển đa dạng. Các mô hình cơ bản bao gồm phương trình vi phân, hàm truyền đạt, graph tín hiệu và phương pháp không gian trạng thái. Ban đầu, tài liệu trình bày chi tiết cách mô tả hệ thống tuyến tính bất biến bằng phương trình vi phân, minh họa qua ví dụ thực tế về đặc tính động học thang máy. Tuy nhiên, nó cũng nhấn mạnh những hạn chế của phương trình vi phân, đặc biệt đối với hệ bậc cao, thúc đẩy việc sử dụng các phương pháp mô tả toán học khác. Để khắc phục những hạn chế này, chương giới thiệu rộng rãi phép biến đổi Laplace, một công cụ toán học thiết yếu. Phần này định nghĩa biến đổi Laplace, trình bày các tính chất quan trọng của nó như tính tuyến tính, định lý chậm trễ, ảnh của đạo hàm và tích phân, cùng với các biến đổi Laplace của các hàm cơ bản (nấc đơn vị, Dirac, dốc, mũ, sin). Từ đó, khái niệm hàm truyền đạt được xây dựng một cách chặt chẽ. Hàm truyền đạt được định nghĩa là tỷ số của biến đổi Laplace của tín hiệu ra và tín hiệu vào, với điều kiện ban đầu bằng không. Điểm cốt lõi là hàm truyền đạt chỉ phụ thuộc vào cấu trúc và thông số của hệ thống, chứ không phụ thuộc vào tín hiệu vào/ra cụ thể, làm cho nó trở thành công cụ lý tưởng để mô tả đặc tính động học của hệ. Cuối cùng, chương hướng dẫn cách tìm hàm truyền đạt cho các phần tử cơ bản (điện, cơ, nhiệt) và các bộ điều khiển/khâu hiệu chỉnh thụ động (mạch tích phân, vi phân, sớm pha, trễ pha) và tích cực (khâu tỉ lệ P, tích phân tỉ lệ PI), cung cấp một khung làm việc toàn diện cho việc phân tích và thiết kế hệ thống điều khiển.





























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)