
LÝ THUYẾT
ĐIỀU KHIỂN
TỰ ĐỘNG
Giảng viên: Lê Lương Hương Thảo
1
Ma$họcphần: 0101003072

Chương 1. Phần tử và hệ thống điều khiển tự động
Chương 2. Mô hình toán học hệ thống điều khiển liên tục
Chương 3. Khảo sát tính ổn định của hệ thống
Chương 4. Đánh giá chất lượng hệ thống điều khiển
Chương 5. Thiết kế hệ thống điều khiển liên tục
Chương 6. Mô tả toán học hệ thống điều khiển rời rạc
Chương 7. Phân tích và thiết kế hệ thống điều khiển rời rạc
NỘI DUNG HỌC PHẦN
2023 2
Chương 2. Mô hình toán học hệ thống điều khiển liên tục

2.1. Khái niệm về mô hình toán học
2.2. Hàm truyền
2.3. Hàm truyền hệ thống tự động
2.4. Phương trình trạng thái
CHƯƠNG 2. MÔ HÌNH TOÁN HỌC
HỆ THỐNG ĐIỀU KHIỂN LIÊN TỤC
2023 Chương 2. Mô hình toán học hệ thống điều khiển liên tục 3
2.1. KHÁI NIỆM VỀ MÔ HÌNH TOÁN
HỌC
2023 4
Chương 2. Mô hình toán học hệ thống điều khiển liên tục
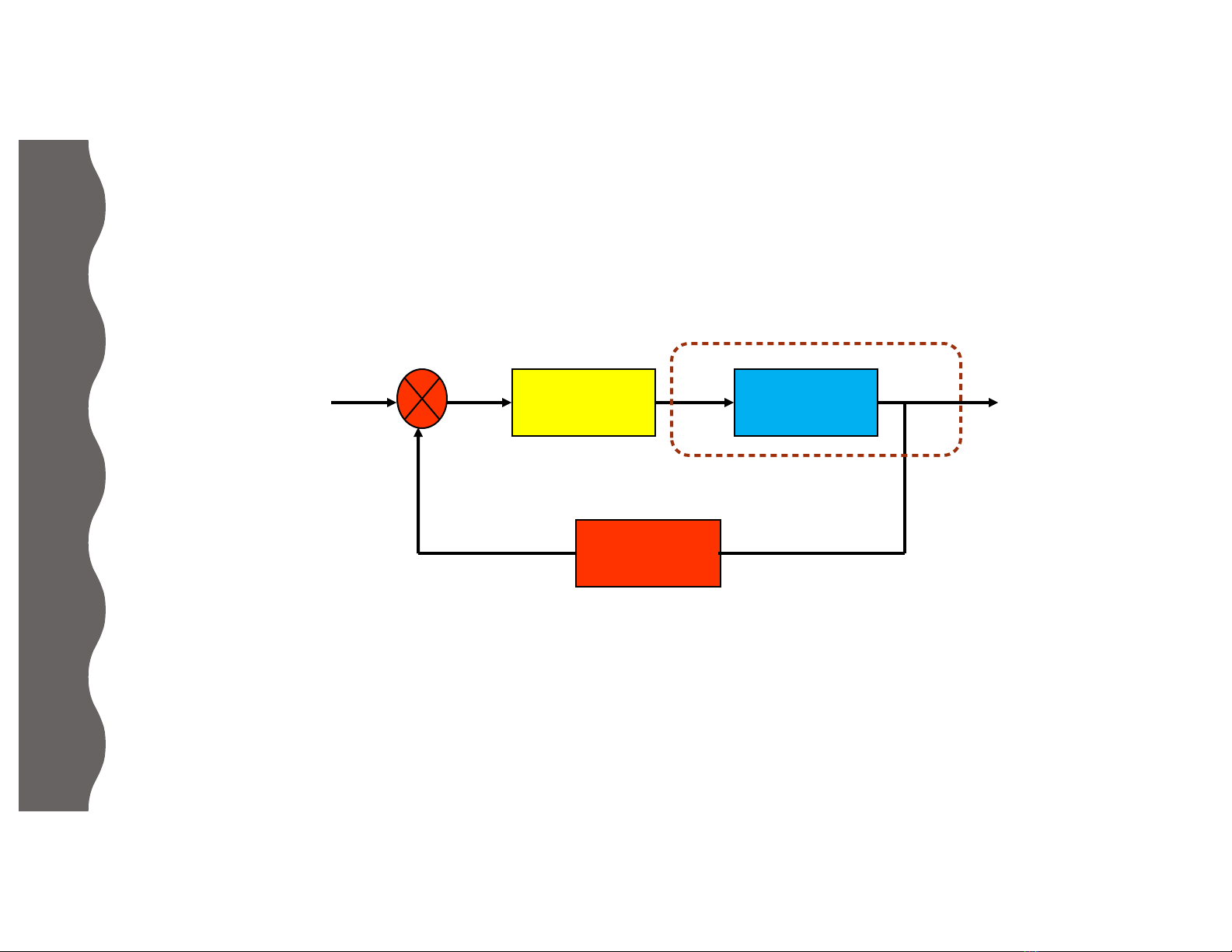
r(t) e(t) u(t) c(t)
cht(t)
Bôv điều khiển Đối tượng
Cảm biến
+-
Hệ thống thực tế :Mô hình toán học
2.1. KHÁI NIỆM VỀ MÔ HÌNH TOÁN
HỌC
2023 5
Chương 2. Mô hình toán học hệ thống điều khiển liên tục
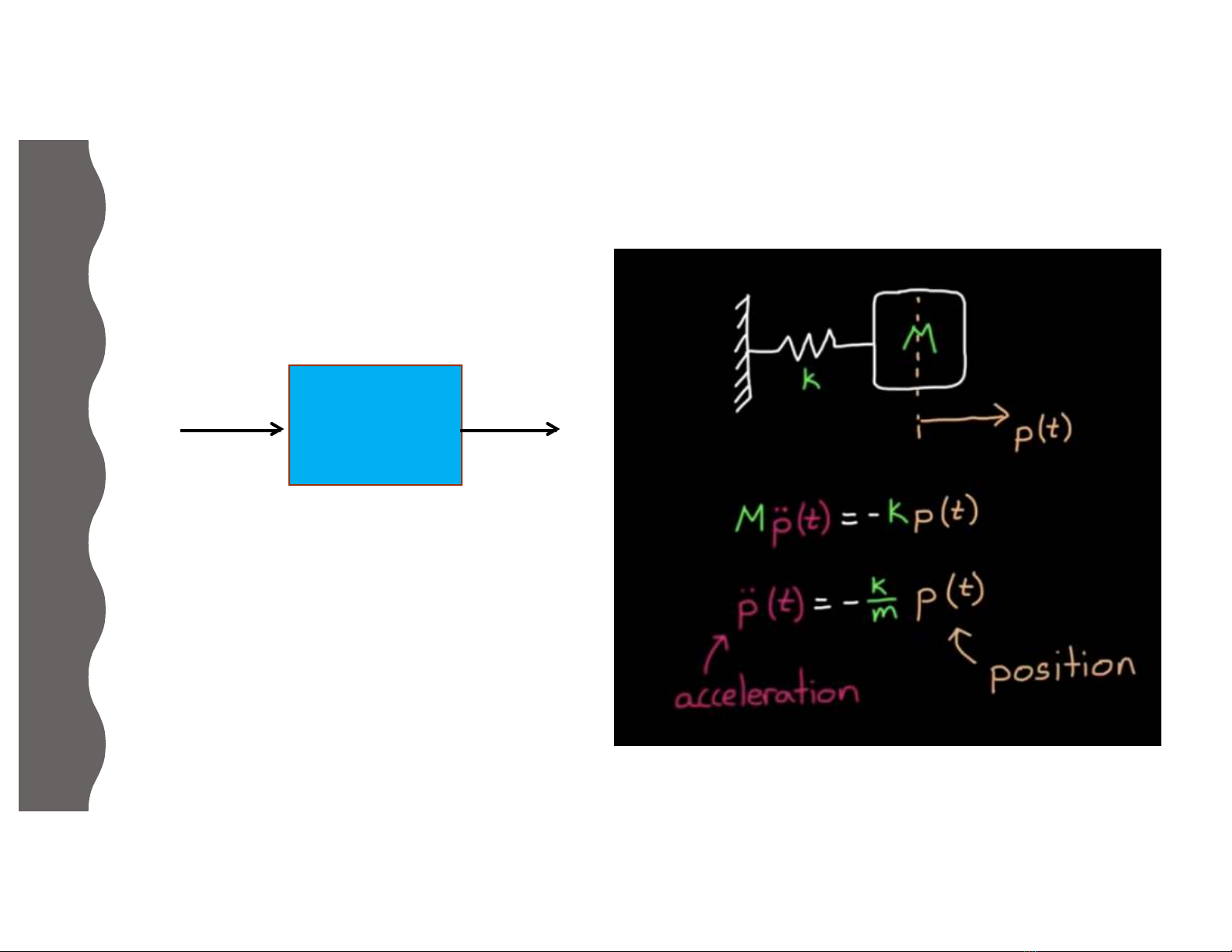
Đối tượng
u(t) c(t)





![Bài giảng môn Mô phỏng và mô hình hóa [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260210/diegomaradona04/135x160/97521771929274.jpg)



















