3/8/2024
1
3/8/2024 Văn Tấn Lượng 1
LÝ THUYẾT ĐIỀU KHIỂN HIỆN ĐẠI
Bô Môn: Điện Công Nghiệp
Khoa Công nghệ Điện – Điện Tử
NỘI DUNG MÔN HỌC
Chương 1: Giới thiệu
Chương 2: Điều khiển phi tuyến
Chương 3: Điều khiển tối ưu và bền vững
Chương 4: Điều khiển thích nghi
3/8/2024 Văn Tấn Lượng 2
3/8/2024
2
3/8/2024 Văn Tấn Lượng 3
NỘI DUNG CHƯƠNG 3
Chất lượng tối ưu
Các phương pháp điều khiển tối ưu
Điều khiển tối ưu dạng toàn phương tuyến
tính LQR
Ứng dụng Matlab giải bài toán tối ưu
Nội dung chương 3
Giới thiệu
Tối ưu hóa tĩnh
Tối ưu hóa động và phương pháp biến phân
Điều khiển tối ưu liên tục dùng phương pháp biến phân
Phương pháp qui hoạch động Bellman
Điều khiển tối ưu toàn phương tuyến tính LQR
Ước lượng trạng thái tối ưu (lọc Kalman)
Điều khiển tối ưu LQG
3/8/2024 Văn Tấn Lượng 4
3/8/2024
3
Giới thiệu
Điều khiển tối ưu : xác luật ĐK cho hệ thống động định cho trước sao
cho tối thiểu hóa một chỉ tiêu chất lượng.
ĐK tối ưu được phát triển trên cơ sở toán học: phương pháp biến
phân (Bernoulli, Euler, Lagrange, Weiertrass,…)
Từ những năm 1950, ĐK tối ưu phát triển mạnh mẽ và trở thành
một lĩnh vực độc lập.
Phương pháp quy hoạch động do Richard Bellman đưa ra trong
thập niên1950.
Nguyên lý cực tiểu Pontryagin do Lev Pontryagin và các đồng sự
đưa ra trong thập niên 1950.
Bài toán điều chỉnh toàn phương tuyến tính và lọc Kalman do
Rudolf Kalman đưa ra trong những năm1960.
3/8/2024 Văn Tấn Lượng 5
Phân loại bài toán điều khiển tối ưu
Có nhiều toán điều khiển tối ưu, tùy theo:
Loại đối tượng điều khiển
Miền thời gian liên tục hay rời rạc
Chỉ tiêu chất lượng
Bài toán tối ưu có ràng buộc hay không
ĐK tối ưu tĩnh: chỉ tiêu chất lượng không phụ thuộc thời gian
ĐK tối ưu động: chỉ tiêu chất lượng phụ thuộc thời gian
Bài toán chỉnh toàn phương tuyến tính (Linear Quadractic
Regulator – LQR)
Bài toán điều khiển tối ưu H2
3/8/2024 Văn Tấn Lượng 6
3/8/2024
4
Ứng dụng
Ngày nay, điều khiển tối ưu được ứng dụng trong
nhiều lĩnh vực:
Không gian (aerospace)
Điều khiển quá trình (proccess control) Robot
Kỹ thuật sinh học (bioengineering)
Kinh tế
Tài chính
...........
3/8/2024 Văn Tấn Lượng 7
Tối ưu hóa tĩnh không ràng buộc
Bài toán tìm mthông tối ưu tĩnh không ràng buộc: số
thực (hay phức) u1, u2,…, um sao cho hàm
L(u1, u2,…, um) đạt cực tiểu:
L(u)=L(u1, u2,…, um) min
trong đó u=[u1, u2,…, um]T
Điểm u* được gọi là điểm cực tiểu cục bộ nếu
L(u)≥L(u*) với mọi unằm trong lân cận của u*.
Điểm u* được gọi là điểm cực tiểu toàn cục nếu
L(u)≥L(u*) với mọiu
3/8/2024 Văn Tấn Lượng 8
3/8/2024
5
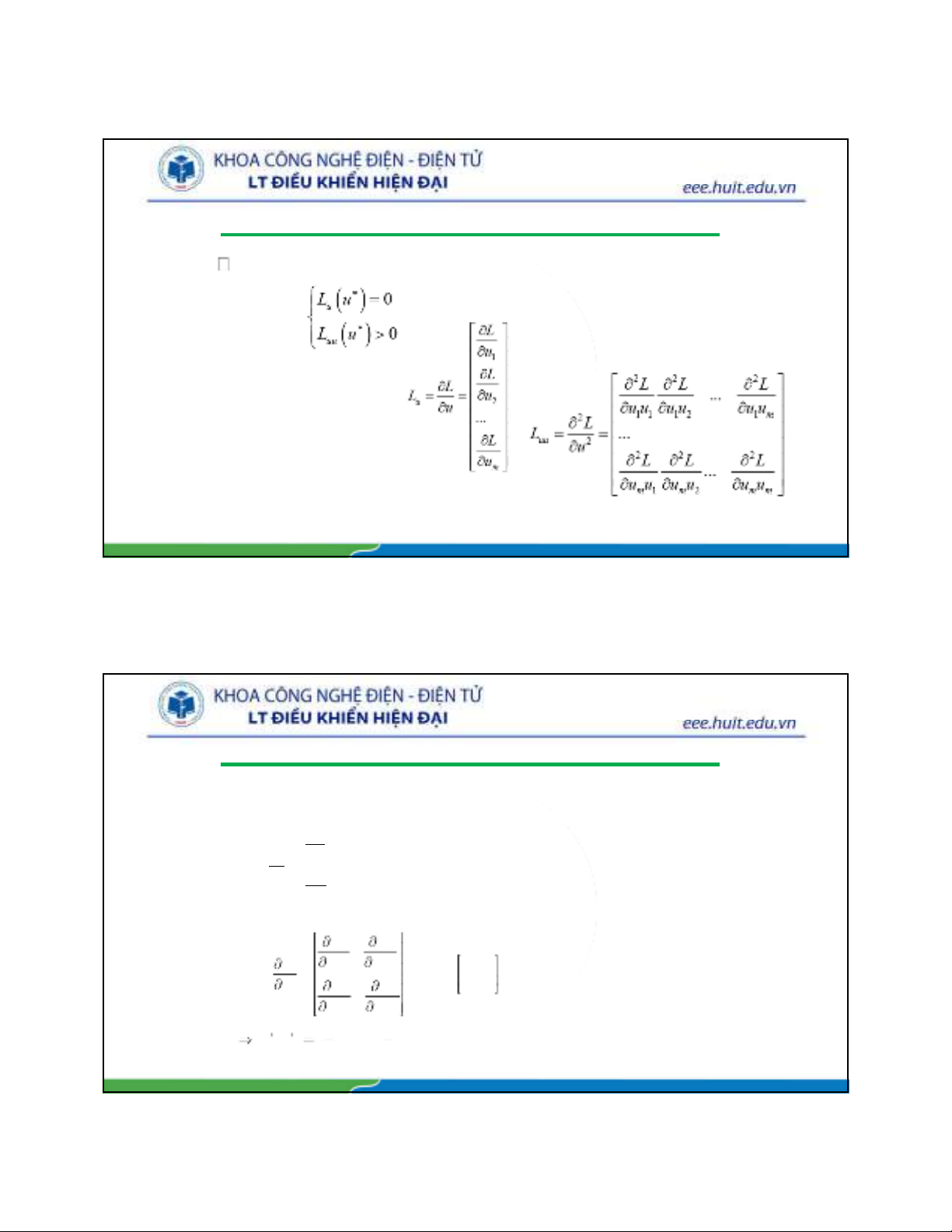
Điều kiện cực trị không ràng buộc
Giả L(u) khả đạo uthì điều và sử hàm theo u, kiện cần đủ để u* là điểm cực
tiểu cục bộ là:
3/8/2024 Văn Tấn Lượng 9
Tìm cực trị không ràng buộc – Thí dụ 1
Tìm cực trị hàm: Lu5u2
12u22 2u u
1 2 8u
13u2
Giải: Điều kiện cần có cực trị:
L
uL
u
L
u
1
L
u
2
0
10u12u80
2
2u4u30
1 2
u
1*
u
2*
0.7222
0.3889
Xét vi phân bậc hai
L
uu
2L
u2
2L
u u
1 1
2L
u u
2 1
2L
u u
1 2
2L
u u
2 2
L
uu
10 2
2 4 L
uu 0
u,u
1 2 0.7222; 0.3889 là điểm cực tiểu
3/8/2024 Văn Tấn Lượng 10


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)