TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI SME.EDU - Mẫu 6.a rev1
VIỆN CƠ KHÍ Học kỳ: 1
Đơn vị chuyên môn: Nhóm Cơ điện tử
Năm học: 2012-2013
ĐỒ ÁN MÔN HỌC: THIẾT KẾ HỆ THỐNG CƠ ĐIỆN TỬ Mã HP: ME4336
Thời gian thực hiện: 15 tuần; Mã đề: VCK05-….;
Ngày giao nhiệm vụ: …/…/20…; Ngày hoàn thành: …/…/20…:
Họ và tên sv:…………….………………… MSSV: ………… Mã lớp: ………… Chữ ký sv: ……….
Ngày …/…/20…
ĐƠN VỊ CHUYÊN MÔN
(ký, ghi rõ họ tên)
Ngày …/…/20…
NGƯỜI RA ĐỀ
(ký, ghi rõ họ tên)
Ngày …/…/20…
CB Hướng dẫn
(ký, ghi rõ họ tên)
I. Nhiệm vụ thiết kế: THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN CHO ROBOT CÔNG NGHIỆP
II. Số liệu cho trước:
Chiều dài các khâu:
1. Khâu 1: a1= (mm)
2. Khâu 2: a2= (mm)
3. Các góc quay 1, 2 (độ)
4. Khoảng trượt d3 = (mm)
5. Chiều dài cần cố đinh d4= (mm)
....
II. Nội dung:
1. Giải bài toán động học, động lực học robot CN, Xác định miền làm việc.
2. Thiết kế điều khiển vận tốc/ vị trí cho khâu tác động cuối của Robot theo luật điều khiển (có CM tính ổn
định)
BẢNG SỐ LIỆU CÁC PHƯƠNG ÁN THIẾT KẾ
Đề
Số
Gh
(kg)
H
(mm)
h
(mm)
vn
(m/ph)
vx
(m/ph)
vh
(m/ph)
L
(mm)
L1
(mm)
L2
(mm) lh
(h)
ĐT
tải
Ghi
chú
VCK05-01
200 4000
L/4 2,0 5,0 7,0 1300
1000
700 18000 ÊM
VCK05-02
195 3900
nt 2,2 5,0 7,0 1300
1000
700 18000 VĐN
VCK05-03
190 3800
nt 2,4 5,0 7,0 1300
1000
700 18000 VĐV
VCK05-04
185 3700
nt 2,6 5,0 7,0 1250
950 650 18500 ÊM
VCK05-05
180 3600
nt 2,8 5,0 7,0 1250
950 650 18500 VĐN
VCK05
175 3500
nt 2,9 5,0 7,0 1250
950 650 18500 VĐV
VCK05
170 3400
nt 3,0 5,0 7,0 1200
900 600 19000 ÊM
VCK05
165 3300
nt 3,2 5,0 7,0 1200
900 600 19000 VĐN
VCK05
160 3200
nt 3,4 5,5 7,5 1200
900 600 19000 VĐV
VCK05
155 3100
nt 3,6 5,5 7,5 1150
850 550 19500 ÊM
VCK05
150 3000
nt 3,8 5,5 7,5 1150
850 550 19500 VĐN
VCK05
145 2900
nt 4,0 5,5 7,5 1150
850 550 19500 VĐV
VCK05
140 2800
nt 4,2 5,5 7,5 1100
800 500 20000 ÊM
VCK05
135 2700
nt 4,4 5,5 7,5 1100
800 500 20000 VĐN
VCK05
130 2600
nt 4,6 5,5 7,5 1100
800 500 20000 VĐV
VCK05
120 2500
nt 4,7 5,5 7,5 1050
850 650 25000 VĐN
VCK05
110 2400
nt 4,8 6,0 8,0 1000
800 600 25000 VĐV
VCK05
100 2300
nt 4,9 6,0 8,0 980 780 580 25000 ÊM
VCK05
90 2200
nt 5,0 6,0 8,0 960 760 560 30000 VĐN
VCK05
80 2100
nt 4,5 6,0 8,0 940 740 540 30000 VĐV
VCK05
70 2000
nt 4,6 6,0 8,0 920 720 520 30000 ÊM
VCK05
60 1900
nt 4,7 6,0 8,0 900 700 500 35000 VĐN
VCK05
50 1800
nt 4,8 6,0 8,0 880 680 480 35000 VĐV
VCK05
40 1700
nt 4,9 6,0 8,0 860 660 460 35000 ÊM
VCK05
30 1600
nt 5,0 6,0 8,0 840 640 440 35000 VĐN
VCK05
190 3800
L/4 2,2 4,0 7,0 1100
900 700 18000 ÊM
VCK05
195 3700
nt 2,4 4,0 7,0 1000
900 700 18000 VĐN
VCK05
194 3300
nt 2,4 5,0 7,0 900 900 700 18000 VĐV
VCK05
180 3500
nt 2,6 5,0 7,0 1150
900 650 18500 ÊM
VCK05
179 3200
nt 2,8 6,0 7,0 1050
920 650 18500 VĐN
VCK05
177 3100
nt 2,9 6,0 7,0 1150
920 650 18500 VĐV
VCK05
183 3000
nt 3,0 4,0 7,0 950 920 600 19000 ÊM
Tài liệu tham khảo chính
1. Trịnh Chất, Lê Văn Uyển: Tính toán thiết kế hệ dẫn động cơ khí, tập 1&2.
2. Đào Trọng Thường: Tính toán máy trục
3. Vũ Liêm Chính: Thang máy – cấu tạo, lựa chọn, lắp đặt và sử dụng
TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI SME.EDU - Mẫu 6.a rev1
VIỆN CƠ KHÍ Học kỳ: 1
Đơn vị chuyên môn: Nhóm Cơ điện tử
Năm học: 2012-2013
ĐỒ ÁN MÔN HỌC: THIẾT KẾ HỆ THỐNG CƠ ĐIỆN TỬ Mã HP: ME4336
Thời gian thực hiện: 15 tuần; Mã đề: VCK05-01;
Ngày giao nhiệm vụ: …/…/20…; Ngày hoàn thành: …/…/20…:
Họ và tên sv:…………….………………… MSSV: ………… Mã lớp: ………… Chữ ký sv: ……….
Ngày …/…/20…
ĐƠN VỊ CHUYÊN MÔN
(ký, ghi rõ họ tên)
Ngày …/…/20…
NGƯỜI RA ĐỀ
(ký, ghi rõ họ tên)
Ngày …/…/20…
CB Hướng dẫn
(ký, ghi rõ họ tên)
I. Nhiệm vụ thiết kế: THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN CHO ROBOT CÔNG NGHIỆP
II. Số liệu cho trước:
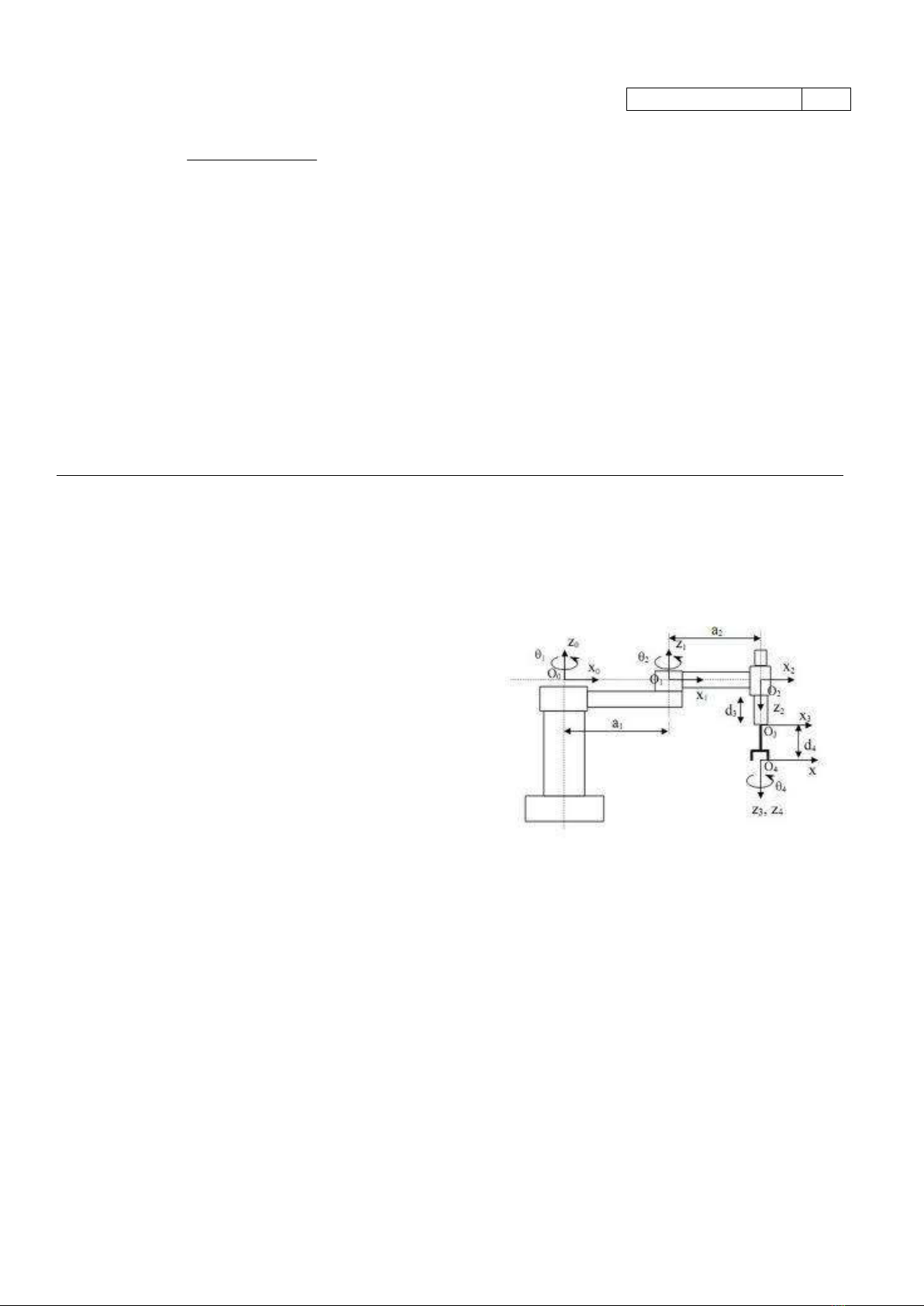
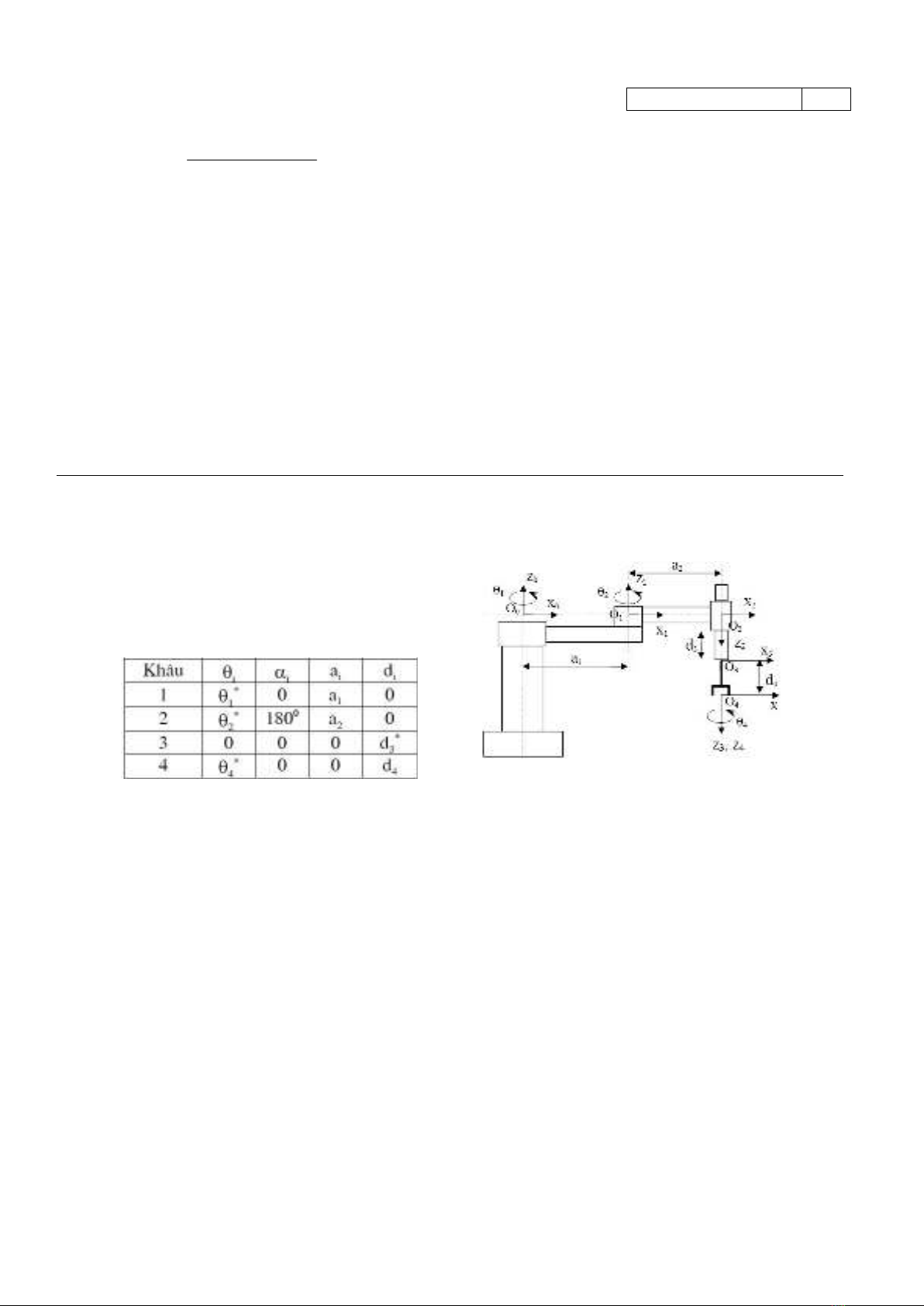
Scara lμ một robot có 4 khâu với cấu
hình RRTR
Bảng thông số D-H
II. Nội dung:
1. Giải bài toán động học, động lực học robot CN, Xác định miền làm việc.
2. Thiết kế điều khiển vận tốc/ vị trí cho khâu tác động cuối của Robot theo luật điều khiển
PD / PID / PI
3. Mô kết quả điều điển bằng phần mềm Matlab SIMULINK


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)