
4
HƯỚNG DẪN THIẾT KẾ HỆ THỐNG CƠ ĐIỆN TỬ
(Bộ môn Cơ điện tử BM Cơ sở thiết kế máy và Robot
Viện Cơ Khí Đại học Bách Khoa Hà Nội - Tài liệu lưu hành nội bộ)
Chương 1: Phân tích nguyên lý và thông số kỹ thuật
Sinh viên cần tìm hiểu và trình bày các nội dung như sau:
1.1. Nguyên lý hoạt động
- Phân tích nguyên lý hoạt động và các thông số kỹ thuật quan trọng của hệ thống.
1.2. Xác định các thành phần của hệ thống dẫn động
- Lập sơ đồ động học của hệ thống
- Trình bày các bộ phận chính của hệ thống
5
Chương 2. Thiết kế hệ thống cơ khí
2.1. Tính toán động học
- Tham khảo tài liệu [1-3].
- Việc xác định công suất sơ bộ và tốc độ trục công tác được trình bày ở cuối tài liệu này.
2.2. Tính chọn các bộ truyền cơ khí và động cơ
- Xe nâng: Tính công suất, số vòng quay, và tỉ số truyền từ đó lựa chọn động cơ và bộ truyền
động cơ khí.
- Xe di chuyển ngang: Tính công suất, số vòng quay, và tỉ số truyền từ đó lựa chọn động cơ và
bộ truyền động cơ khí.
Tham khảo tài liệu [1]
2.3. Tính chọn các khớp nối, trục, ổ lăn, phanh
Tham khảo tài liệu [1-3]

6
Chương 3. Xây dựng bản vẽ lắp và mô phỏng
3.1. Thiết kế chi tiết và xây dựng bản vẽ lắp
- Xây dựng bản vẽ lắp 2D/3D
- Lựa chọn dung sai cho mối ghép
- Xây dựng bản vẽ chế tạo 1 chi tiết
3.2. Mô phỏng nguyên lý hoạt động (động học)
- Mô phỏng chuyển động của hệ thống
7
Tài liệu tham khảo
1. Trịnh Chất – Lê Văn Uyển: “Tính toán thiết kế hệ dẫn động cơ khí tập I và tập II,” nhà xuất
bản giáo dục, 1998.
2. Đào Trọng Thường: Tính toán máy trục.
3. Vũ Liêm Chính: Thang máy – cấu tạo, lựa chọn, lắp đặt và sử dụng.
8
Phụ lục hướng dẫn về TÍNH ĐỘNG HỌC
Tham khảo tài liệu [1, 2] để có hướng dẫn chi tiết. Trong đó, công suất và tốc độ trên (các) trục
công tác của (các) hệ thống dẫn động được xác định như sau:
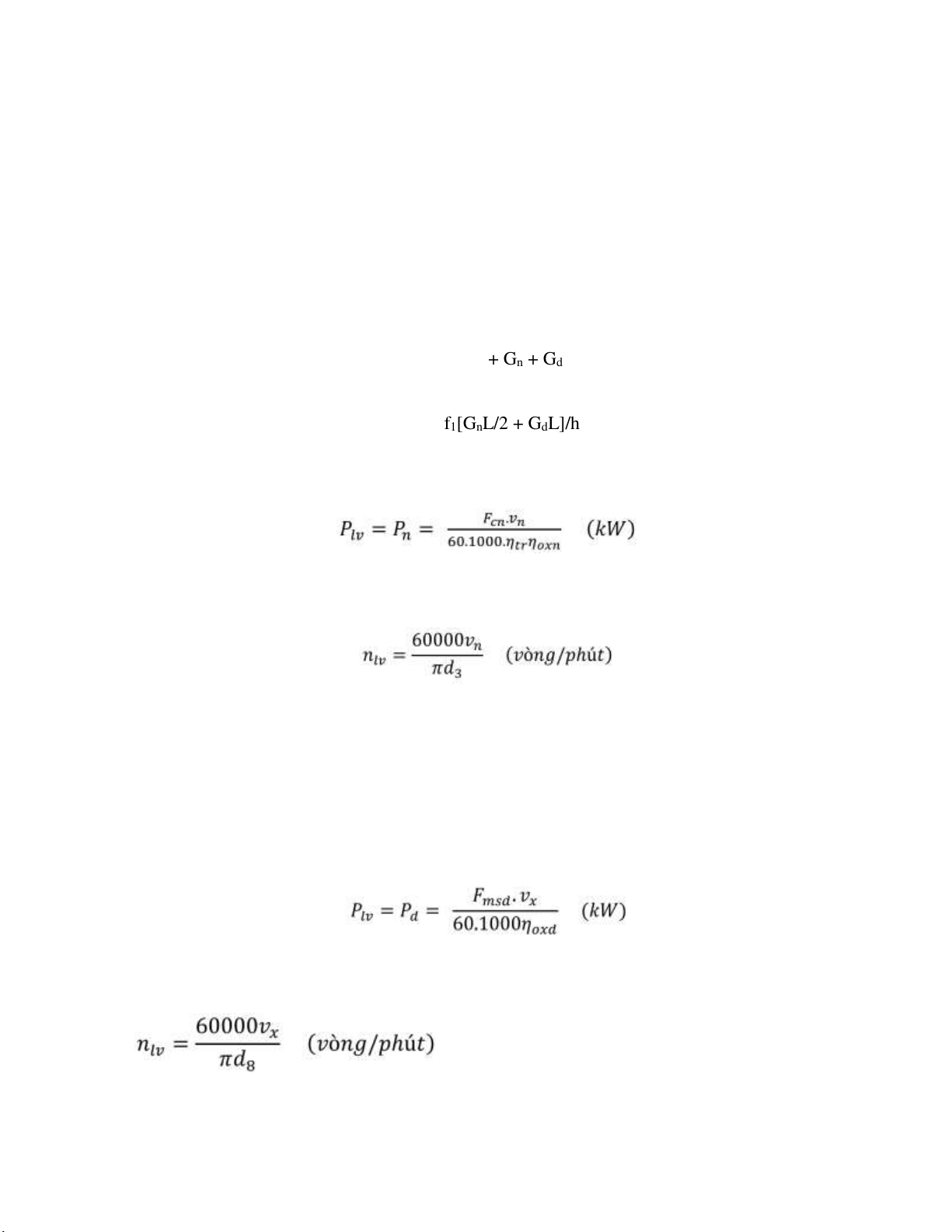
1. Cơ cấu nâng
1.1 Công suất Plv
Lực cản khi nâng (N)
Fcn = Fmsn + Gn + Gd
trong đó, lực ma sát Fmsn được tính sơ bộ như sau:
Fmsn = f1[GnL/2 + GdL]/h
với f1 là hệ số ma sát giữa con lăn và dẫn hướng.
Công suất trên trục ra của hộp giảm tốc của bộ phận nâng là:
Trong đó 𝜂𝑡𝑟 là hiệu suất của thanh răng-bánh răng, 𝜂𝑜𝑥𝑛 là hiệu suất của ổ trục con lăn xe nâng.
1.2 Tốc độ nlv
2. Xe đẩy
2.1 Công suất Plv
Lực cản xe đẩy do ma sát giữa con lăn và ray:
Fmsd = f2.Gd
Với f2 là hệ số ma sát giữa con lăn và dẫn hướng.
Công suất trên trục bánh xe của xe đẩy là:
Trong đó 𝜂𝑜𝑥𝑑 là hiệu suất của ổ trục bánh xe đẩy.
2.2 Tốc độ nlv
+ g.(Gn+Gd)
f1.g.[GnL/2+ GdL]/h
1000
1000




![Các chip bổ trợ: [Thông tin chi tiết/Hướng dẫn chọn mua/Nơi bán]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20111130/monocin/135x160/cac_chip_bo_tro_119.jpg)

![Hệ thống đèn chạy ban ngày tốt nhất: [Hướng dẫn]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20111124/gauhaman123/135x160/dien_xe_36__8662.jpg)
![Tài liệu về 555: [Thêm từ mô tả nếu có thể, ví dụ: hướng dẫn, phân tích chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20111105/1231020082/135x160/555_la_mot_loai_linh_kien_kha_la_pho_bien_bay_gio_voi_viec_de_dang_tao_duoc_xung_vuong_va_co_the_thay_doi_tan_so_tuy_thich_3818.jpg)

![Transistor trường MOSFET: [Thông tin chi tiết/Hướng dẫn/Phân loại/Ứng dụng]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20111004/tonghoangduy1503/135x160/transistor_truong_8023.jpg)














![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)