
KỶ YẾU NGHIÊN CỨU KHOA HỌC SINH VIÊN NĂM HỌC 2018-2019
P a g e 14 | 82
NGHIÊN CỨU, THIẾT KẾ VÀ CHẾ TẠO MÔ HÌNH XE TỰ LÁI
Giảng viên hướng dẫn: TS. Trần Văn Lợi
Sinh viên thực hiện: Đặng Gia Hiển Lớp: CQ.56.CKOT
Võ Văn Trà Lớp: CQ.56.CKOT
Nguyễn Trung Nhân Lớp: CQ.56.CKOT
Đỗ Nguyễn Đình Văn Lớp: CQ.56.CKOT
Nguyễn Trung Hiếu Lớp: CQ.56.CKOT
Tóm tắt: Nghiên cứu và chế tạo mô hình ô tô tự lái trên chương trình mô phỏng toán học bằng
Matlab Simulink. Giải quyết bài toán ngược là xác định góc đánh lái từ một quỹ đạo có sẵn bằng
phương pháp mới là sử dụng mô phỏng toán học. Từ kết quả góc đánh lái ở mô hình toán học ta đưa
vào mô hình ô tô thật, sau đó, so sánh hai kết quả này. Nếu kết quả có độ sai khác nhau nhỏ nhất hoặc
bằng không tức là mô hình toán học của ta phù hợp với mô hình ô tô thật. Từ đó, ta có thể tác động
lên một chiếc ô tô thực tế đang chạy trên đường để ô tô tự lái trên quỹ đạo có sẵn. Nếu như dữ liệu
quỹ đạo có sẵn được cập nhật liên tục thì khả năng tự lái của ô tô sẽ dần hoàn thiện.
Từ khóa: Solidwork, Tự Lái, Qũy Đạo.
1. ĐẶT VẤN ĐỀ
Hệ thống lái tự động là hướng nghiên cứu chính trong ô tô ngày nay. Mức cao nhất trong
chế độ lái tự động cho phép các phương tiện thực hiện tất cả các chức năng lái xe và theo dõi
tình trạng đường đi.
Để nghiên cứu động lực học lái xe, cần nghiên cứu kết hợp nhiều công nghệ khác nhau:
quỹ đạo chuyện động của xe, mạng Thông tin tín hiệu giao thông thông minh, khả năng kết
nối thông tin giữa các phương tiện tham gia giao thông
Đặc biệt, quỹ đạo chuyển động của xe được xác định bằng GPS, máy quét laser, cảm
biến radar, cảm biến vị trí, camera… quỹ đạo thực tế của ô tô bởi phanh và lái.
Hệ thống lái tự động bao gồm các hệ thống quỹ đạo mong muốn và hệ thống quỹ đạo
thực tế (bao gồm hệ thống truyền động điện, hệ thống điện, hệ thống phanh điện). Hệ thống
xác định quỹ đạo mong muốn của hệ thống: GPS, máy quét laser, cảm biến vị trí, camera và
điều khiển máy tính. Hệ thống truyền động điện là một hệ thống thành phần trong hệ thống
lái tự động. Hệ thống truyền động điện bao gồm ba thành phần chính: bộ tạo tín hiệu, bộ điều
khiển, và bộ truyền động.
2. CÁC NỘI DUNG CHÍNH
2.1. Tổng quan về mô hình xe tự lái
Mô hình xe tự lái được chế tạo dựa trên một xe tự lái thực tế
KỶ YẾU NGHIÊN CỨU KHOA HỌC SINH VIÊN NĂM HỌC 2018-2019
P a g e 15 | 82
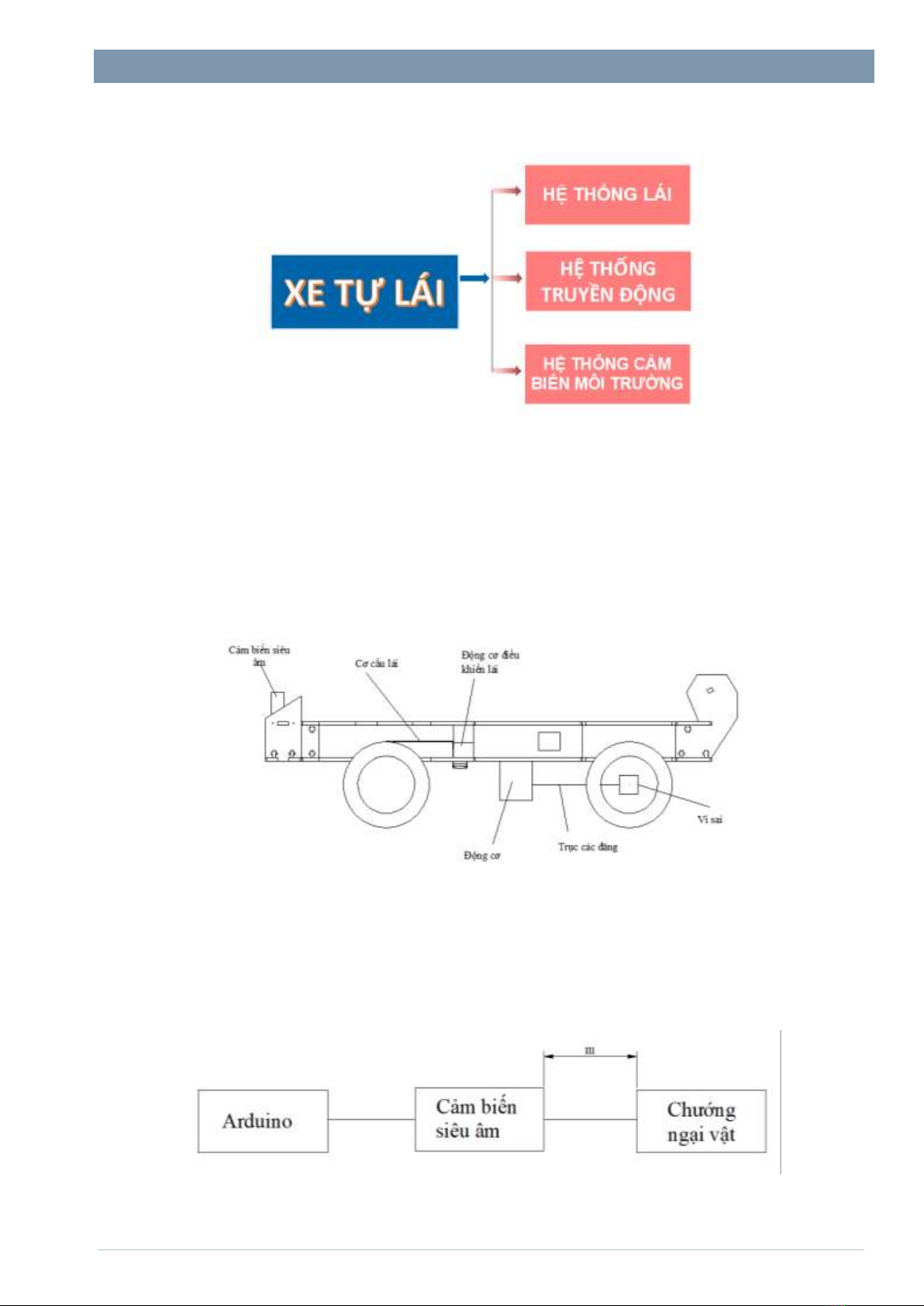
Hình 1. Cấu tạo mô hình xe tự lái
Mô hình xe tự lái gồm ba hệ thống:
- Hệ thống lái
- Hệ thống truyền động
- Hệ thống cảm biến môi trường
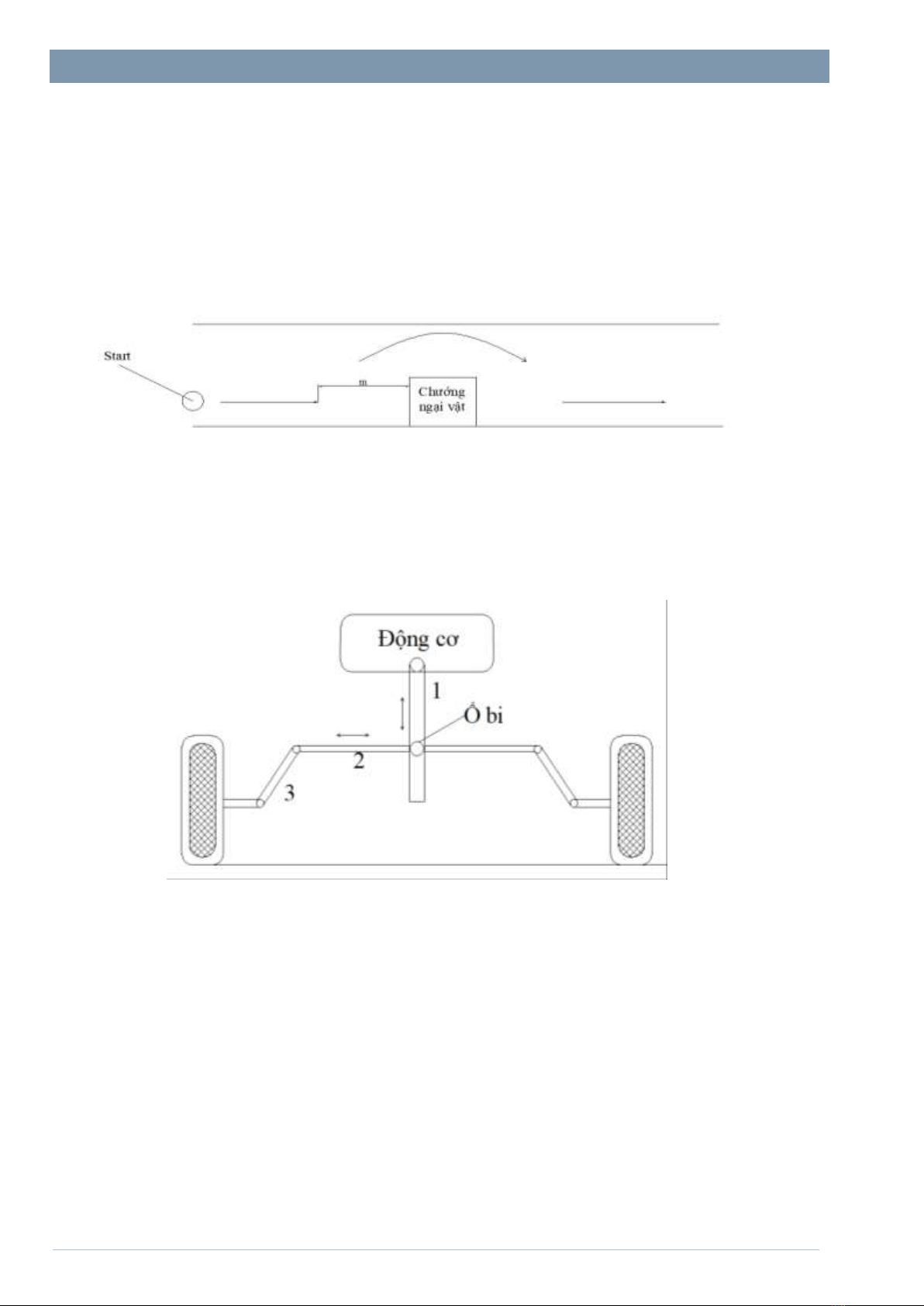
Hình 2. Mô hình xe tự lái
2.2. Các nguyên lý trên mô hình xe tự lái
2.2.1. Nguyên lý 1: Xác định chướng ngại vật
Để xác định chướng ngại vật nhóm dùng cảm biến siêu âm
Hình 3. Sơ đồ xác định chướng ngại vật
KỶ YẾU NGHIÊN CỨU KHOA HỌC SINH VIÊN NĂM HỌC 2018-2019
P a g e 16 | 82
Khi xe chạy trên đường, sóng siêu âm từ cảm biến siêu âm sẽ truyền đi trong không khí,
gặp vật cản (vật cần đo khoảng cách tới) sẽ phản xạ ngược trở lại và được đầu thu ghi lại.
Vận tốc truyền âm thanh trong không khí là một giá trị xác định trước, ít thay đổi. Do đó nếu
xác định được khoảng thời gian từ lúc phát sóng siêu âm tới lúc nó phản xạ về đầu thu sẽ quy
đổi được khoảng cách từ cảm biến tới vật thể
2.2.2 Xác định quỹ đạo tọa độ ban đầu
Hình 4. Sơ đồ xác định tọa độ ban đầu
Xe được đặt tại vị trí Start, khi di chuyển cũng dựa vào cảm biến siêu âm để xác định
khoảng cách giữa xe và chướng ngại vật đã được lập trình sẵn, sau đó xe sẽ đánh lái để tránh
chướng ngại vật, sau khi vượt qua được chướng ngại vật xe sẽ bẻ lái lại và di chuyển theo
đường đi ban đầu.
Hình 5. Nguyên lý điều khiển lái
2.2.3 Nguyên lý điều khiển lái
Thanh 1 thì có một đầu cố định được gắn với động cơ servo đầu còn lại tự do, ở thanh
này có 1 ổ bi có thể di chuyển lên xuống trong thanh. Thanh 2 được nối với thanh 1 bằng bu
lông gắn ngay chỗ ổ bi. Khi động cơ quay cùng chiều kim đồng hồ thì đầu tự do của thanh 1
sẽ di chuyển về phía bên trái, ô bi sẽ trượt lên trong thanh 1, khi đó bánh xe sẽ đánh sang bên
trái. Ngược lại khi động cơ quay ngược chiều kim đồng hồ thì bánh xe sẽ đánh sang bên phải
2.2.4 Nguyên lý truyền lực
KỶ YẾU NGHIÊN CỨU KHOA HỌC SINH VIÊN NĂM HỌC 2018-2019
P a g e 17 | 82
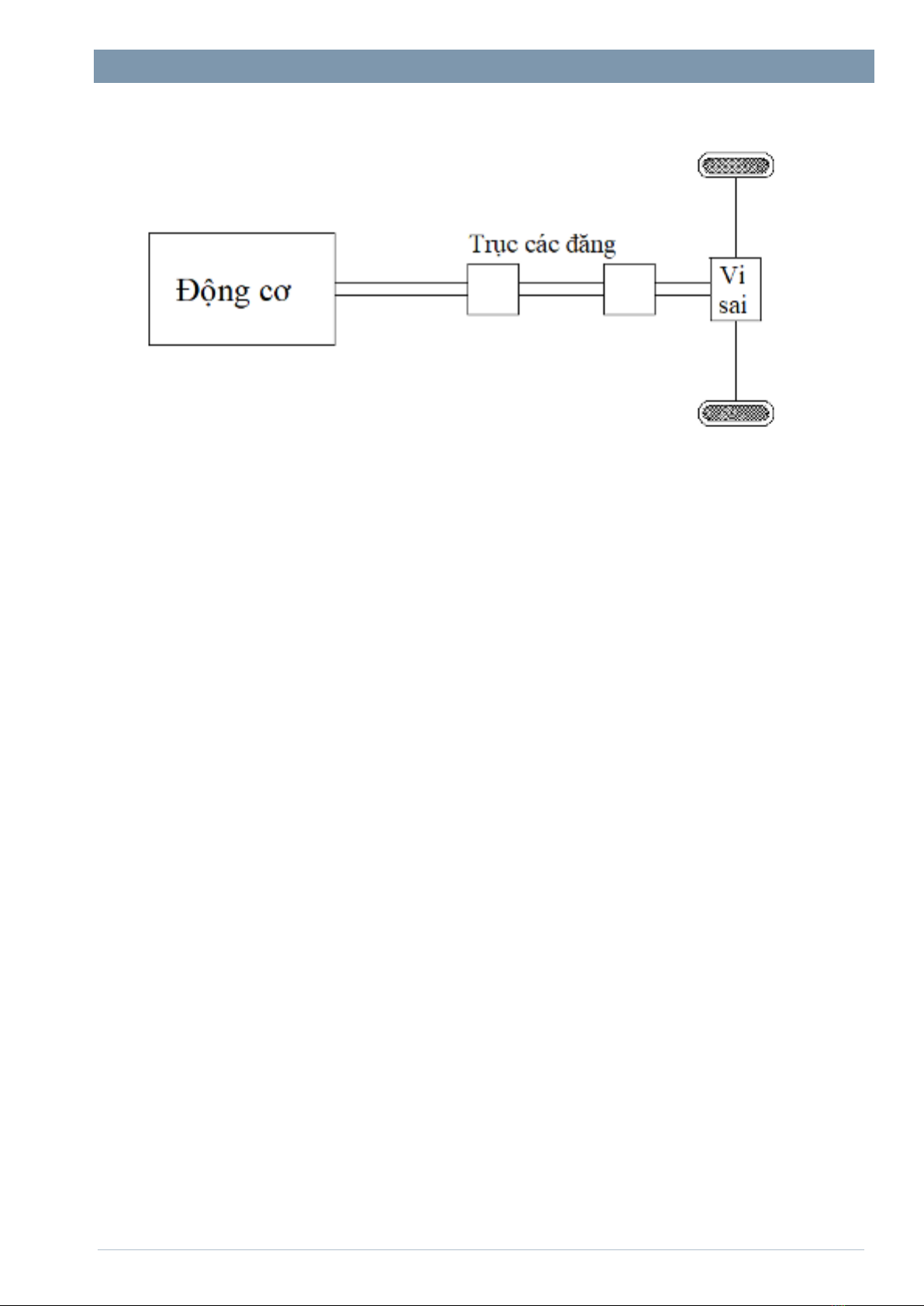
Hình 6. Sơ đồ nguyên lý truyền lực
Mô men sẽ được truyền từ động cơ tới vi sai qua trục các đăng và truyền tới hai bánh xe
làm bánh xe chuyển động
2.3. Thiết kế chế tạo mô hình
Mô hình ô tô tự lái gồm có 2 phần chính: Phần cơ khí và phần điện tử
- Phần cơ khí bao gồm: Thân, vỏ, bánh xe, vi sai, cơ cấu lái, hệ thống nhíp
- Phần điện tử bao gồm: Mạch Adruino, các cảm biến, động cơ và một số linh kiện khác
Mô hình được thiết kế trên phần mềm solidword và dựa vào đó để tạo nên mô hình thực tế.
3. KẾT LUẬN
Trong quá trình thực hiện đề tài sẽ xảy ra nhiều bất cập cũng như khó khăn, nhưng với sự
cố gắng, quyết tâm và sự đóng góp, giúp đỡ của thầy hướng dẫn, nhóm đã hoàn thành xong
đề tài.
Với đề tài trên sẽ có nhiều mặt hạn chế và khuyết điểm nhóm rất mong được sự đóng
góp tận tình của quý thầy cô để mô hình chúng em được tối ưu nhất có thể, để sớm có thể ứng
dụng được trong thực tế.
Tài liệu tham khảo
[1]. TS. Nguyễn Tuấn Anh, Bài giảng ứng dụng tin học trong ô tô- máy kéo
[2]. ThS. Phạm Thanh Bình, Điều khiển ổn định quỹ đạo chuyển động của ô tô
[3]. https://www.tesla.com/autopilot
[4]. TS. Trần Văn Lợi , Methods for determining the vehicle trajectory based on motion
model








![Hệ thống phanh Mazda CX5: [Mô tả/Đánh giá/Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2016/20160824/khoanhi1996/135x160/6221472045851.jpg)







![Đề thi Động cơ đốt trong kết thúc học phần: Tổng hợp [năm]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260320/hoabattu2026/135x160/24841774320014.jpg)








