BỘ GIÁO DỤC VÀ ĐÀO TẠO BỘ QUỐC PHÒNG
VIỆN KHOA HỌC VÀ CÔNG NGHỆ QUÂN SỰ
ĐẶNG NAM KIÊN
NGHIÊN CỨU TỔNG HỢP THUẬT TOÁN ĐIỀU KHIỂN
BÁM QUỸ ĐẠO CHO ROBOT TỰ HÀNH
BỐN BÁNH LÁI CHỦ ĐỘNG
Ngành: Kỹ thuật điều khiển và Tự động hóa
Mã số: 9 52 02 16
TÓM TẮT LUẬN ÁN TIẾN SĨ KỸ THUẬT
Hà Nội – 2025
CÔNG TRÌNH ĐƯỢC HOÀN THÀNH TẠI
VIỆN KHOA HỌC VÀ CÔNG NGHỆ QUÂN SỰ - BỘ TỔNG THAM MƯU
Người hướng dẫn khoa học:
1. PGS. TS Nguyễn Vũ
2. TS Vũ Quốc Huy
Phản biện 1: GS.TS Phan Xuân Minh
Đại học Bách Khoa Hà Nội
Phản biện 2: PGS.TSKH Phạm Đình Tùng
Học viện Kỹ thuật quân sự
Phản biện 3: PGS. TS Trần Đức Thuận
Viện Khoa học và Công nghệ quân sự
Luận án được bảo vệ trước Hội đồng đánh giá luận án tiến sĩ cấp
Viện họp tại Viện Khoa học và Công nghệ quân sự vào hồi: ……giờ
…… ngày ...... tháng……. năm 2025
Có thể tìm hiểu luận án tại:
- Thư viện Viện Khoa học và Công nghệ quân sự
- Thư viện Quốc gia Việt Nam

1
MỞ ĐẦU
1. Tính cấp thiết của đề tài luận án
Giai đoạn gần đây, các loại robot đang được phát triển mạnh mẽ và được
ứng dụng ở tất cả các lĩnh vực của đời sống kinh tế, xã hội và quốc phòng, đặc
biệt, sau khi đại dịch COVID-19 đã làm thay đổi mọi mặt của đời sống xã hội
loài người. Trong đó, robot tự hành chiếm một vị trí quan trọng và là đối tượng
nghiên cứu phổ biến trong nước và trên thế giới. Trong số các dạng robot tự
hành tiên tiến hiện nay, robot tự hành bốn bánh lái chủ động (4WD4WS) là dạng
robot dư dẫn động, sử dụng bốn bánh xe truyền động độc lập và bốn bánh lái
độc lập, có khả năng di chuyển linh hoạt với các chế độ điều khiển khác nhau.
Trong các bài toán điều khiển robot tự hành, bài toán điều khiển bám quỹ
đạo luôn là nhiệm vụ hàng đầu của. Việc đạt độ chính xác cao trong chuyển động
robot thường rất khó khăn bởi những yếu tố phi tuyến, bất định luôn tồn tại trong
mô hình robot. Rất nhiều nghiên cứu hiện có chia bài toán điều khiển bám quỹ
đạo của các loại robot tự hành có bánh lái thành hai thành phần, điều khiển động
lực truyền động và điều khiển góc lái. Tuy nhiên phần lớn trong số đó đặt trọng
số lên phần động lực truyền động, còn bài toán điều khiển góc lái chưa được
quan tâm đúng mực. Trong khi đó để bám được một quỹ đạo yêu cầu tốt với các
xe robot có bánh lái thì giải pháp tối ưu hơn là duy trì một tốc độ cho thân xe
sao cho lực li tâm không vượt quá giới hạn cho phép và tập trung nhiều hơn vào
điều khiển góc lái.
Khi đó, bài toán bám quỹ đạo có thể được tổng hợp với hai vòng điều khiển,
vòng ngoài sẽ coi góc lái của các bánh xe là đầu vào điều khiển. Vòng trong sẽ
là các bộ điều khiển bánh lái bám theo các góc lái yêu cầu. Với vòng ngoài hiện
tại các giải pháp hiện có thường sử dụng các bộ điều khiển động hình học ngang
thân xe (hay các thuật toán dẫn đường hình học), tuy nhiên trong những ưu điểm
riêng của xe robot dạng 4WD4WS thì các thuật toán này chưa tận dụng được.
Do vậy cần thiết phải xây dựng một thuật dẫn có thể tận dụng tốt hơn đặc điểm
động học độc đáo của 4WD4WS. Ở vòng điều khiển trong, hiện nay các tác giả
đa phần sử dụng những bộ điều khiển kinh điển như PI và PID thì hiệu quả bám
quỹ đạo sẽ thấp, đặc biệt là khi bánh lái chịu tải thay đổi từ tương tác giữa lốp
xe với mặt đường. Như vậy vòng trong cũng cần được cải thiện bằng những
thuật toán điều khiển bền vững và tiên tiến hơn.
2. Mục tiêu nghiên cứu
Nghiên cứu, đề xuất thuật toán điều khiển trượt bám quỹ đạo mới cho robot
bốn bánh truyền động và bốn bánh lái độc lập 4WD4WS có mô hình phi tuyến
bất định. Với mục tiêu như vậy luận án đặt ra hai mục tiêu cụ thể sau đây:
- Xây dựng thuật toán dẫn đường hình học mới cho robot 4WD4WS.
- Xây dựng thuật toán điều khiển bám góc lái mới cho robot 4WD4WS
trên nền tảng của điều khiển phi tuyến và điều khiển bền vững.
3. Đối tượng và phạm vi nghiên cứu

2
Đối tượng nghiên cứu: Robot tự hành bốn bánh lái chủ động 4WD4WS
trong đó đi sâu vào nghiên cứu thuật toán dẫn đường, thuật toán điều khiển bám
góc lái cho 4WD4WS.
Phạm vi nghiên cứu: Robot 4WD4WS di chuyển trên bề mặt nằm ngang
với tốc độ không đổi, không bị nghiêng, chịu tác động của nhiễu do tương tác
với mặt đường khi bám theo một quỹ đạo yêu cầu được xác định trước.
4. Nội dung nghiên cứu
Nghiên cứu về mô hình động học của robot tự hành bốn bánh lái chủ động
4WD4WS, tổng hợp và phân tích về các phương pháp điều khiển bám quỹ đạo
cho robot 4WD4WS đã công bố làm cở sở cho định hướng nghiên cứu luận án.
Nghiên cứu các thuật toán dẫn đường cho robot 4WD4WS trên nền tảng đó
xây dựng thuật toán dẫn đường mới cho 4WD4WS.
Nghiên cứu lý thuyết điều khiển phi tuyến hiện đại và khả năng áp dụng cho
các hệ bậc ba, là đặc trưng của hệ thống điều khiển bánh lái của robot
4WD4WS,với yêu cầu cao về thời gian đáp ứng của hệ thống, từ đó phát triển
bộ điều khiển trượt hữu hạn cho các hệ bậc ba và ứng dụng vào bài toán điều
khiển bám quỹ đạo cho robot 4WD4WS.
5. Phương pháp nghiên cứu
Kết hợp giữa phương pháp lý thuyết với mô phỏng số. Các phương pháp
dẫn đường hình học: Ngắm theo điểm đích ảo, Stanley; phát triển thuật toán dẫn
đường mới. Lý thuyết điều khiển phi tuyến: điều khiển chế độ trượt, điều khiển
trượt hữu hạn; tổng hợp các bộ điều khiển mới cho robot 4WD4WS, phân tích
tính ổn định bằng tiêu chuẩn Lyapunov; mô phỏng số cho hệ thống bằng phần
mềm Matlab-Simulink.
6. Ý nghĩa khoa học và thực tiễn
Ý nghĩa khoa học: Xây dựng thuật toán dẫn đường và điều khiển bám
góc lái mới cho robot 4WD4WS hoạt động trong điều kiện giới hạn về thời gian
hội tụ của hệ thống trên nền tảng lý thuyết điều khiển chế độ trượt và chế độ
trượt bậc cao, có khả năng dễ dàng áp dụng trong thực tế.
Ý nghĩa thực tiễn: Kết quả nghiên cứu của luận án là cơ sở khoa học để
áp dụng và triển khai thuật toán đề xuất vào một robot cụ thể trong phòng thí
nghiệm để kiểm chứng thuật toán và sẵn sàng ứng dụng cho robot phục vụ trong
kho hàng hoặc các robot vận chuyển, các xe ô tô tự hành bám làn đường.
7. Bố cục của luận án
Với các mục tiêu nghiên cứu đặt ra, ngoài các phần mở đầu, kết luận, danh
mục tài liệu tham khảo và phụ lục, luận án được bố cục thành 04 chương.
Chương 1
TỔNG QUAN VỀ ROBOT BỐN BÁNH LÁI CHỦ ĐỘNG 4WD4WS
VÀ BÀI TOÁN ĐIỀU KHIỂN BÁM QUỸ ĐẠO
1.1. Tổng quan về robot bốn bánh lái chủ động 4WD4WS
3
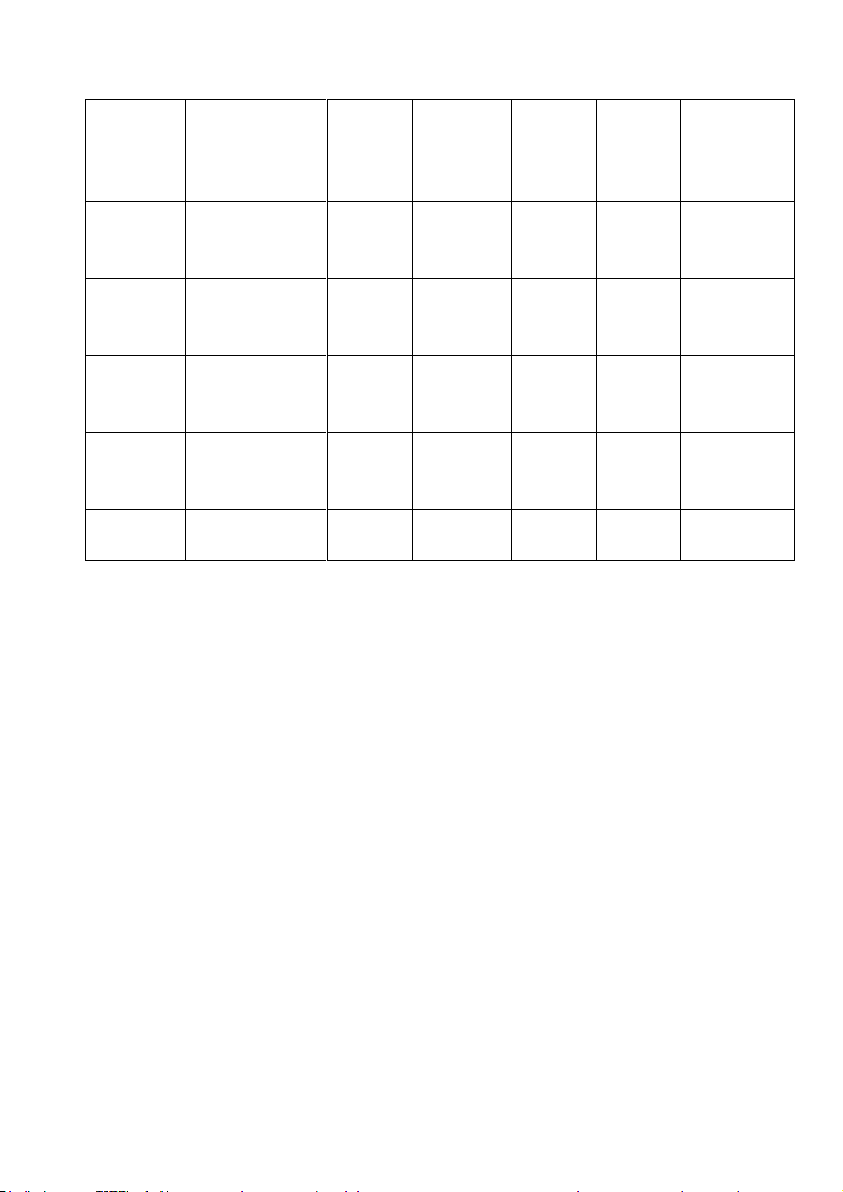
Bảng 1.1. Tổng hợp một số robot bốn bánh lái chủ động 4WD4WS
Hãng/
Model
Kích thước
(mm)
Khối
lượng
(kg)
Tốc độ
tối đa
(km/h)
Tải
trọng
(kg)
Công
suất
(W)
Thời gian
hoạt
động
(giờ)
JCB
Fastrac
4000
5400x 2550
x 2990
7575
60
7000
16000
0
N/A
Newton
Agri-
rover
N/A x 400 x
N/A
20
N/A
15
600
8
Agilex
Ranger
Mini
558 x 492 x
420
55
6
50
1000
5
Ambot
GRP
4400
1270x 1067
x N/A
N/A
19
249
N/A
8
Adept
Seekur
1340x1200x
964
300
6,48
70
N/A
8
Như trên bảng 1.1, robot 4WD4WS đã và đang được sử dụng rộng rãi với
nhiều ứng dụng khác nhau (các ứng dụng trong phòng thí nghiệm đến các ứng
dụng thực tế) từ kích thước nhỏ với khối lượng chỉ 20 kg cho đến các robot có
kích thước hơn 5m chiều dài và khối lượng hơn 7 tấn.
1.2. Động học hệ thống điều hướng robot bốn bánh lái chủ động
4WD4WS
1.2.1. Động học dựa trên sự trượt bánh kết hợp hai chiều (CWS )
Xấp xỉ sự trượt bánh kết hợp hai chiều với giá trị sai lệch rất đáng kể và
dùng giá trị này để xác định các lực tương tác lốp mặt đường gây ra sai lệch mô
hình, giảm độ tin cậy của mô hình động học.
1.2.2. Động học dựa trên khái niệm về độ cứng lái (cornering stiffness) và
tâm quay tức thời (ICR)
Với nhiều vòng tính toán thực hiện phép lấy xấp xỉ cũng như việc xác định
hệ số độ cứng lái (cornering stiffness) có quá nhiều tham số phụ thuộc và được
thay thế bởi một giá trị hằng số duy nhất để sử dụng vào tính toán lực tương tác
lốp với mặt đường cũng khiến mô hình động học cho robot chưa hoàn hảo.
1.2.3. Động học dựa trên tâm quay tức thời (ICR) hay lái Ackermann và
không có sự trượt bánh
Thông thường mô hình động học Ackermann được giản lược thành dạng xe
đạp 2 bánh: