
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC GIAO THÔNG VẬN TẢI
PHAN TẤN TÀI
NGHIÊN CỨU KIỂM SOÁT PHÂN PHỐI CÔNG
SUẤT KÉO TRÊN CẦU CHỦ ĐỘNG CỦA Ô TÔ
CON BẰNG ABS
Ngành: Kỹ thuật cơ khí động lực
Mã số: 9520116
TÓM TẮT LUẬN ÁN TIẾN SĨ
Hà Nội, 2025

Công trình được hoàn thành tại:
Bộ môn Cơ khí ô tô - Khoa Cơ khí
TRƯỜNG ĐẠI HỌC GIAO THÔNG VẬN TẢI
Người hướng dẫn khoa học:
1) PGS. TS. TRẦN VĂN NHƯ
2) PGS. TS. ĐÀO MẠNH HÙNG
Luận án được bảo vệ trước Hội đồng chấm luận án cấp trường họp tại:
TRƯỜNG ĐẠI HỌC GIAO THÔNG VẬN TẢI
vào hồi ...... giờ ngày ...... tháng ...... năm ......
Có thể tìm hiểu luận án tại thư viện TRƯỜNG ĐẠI HỌC GIAO
THÔNG VẬN TẢI và thư viện QUỐC GIA VIỆT NAM.

1
MỞ ĐẦU
Tính cấp thiết của đề tài nghiên cứu
Vi sai phân phối công suất ra các bánh xe có giá trị tùy vào trạng thái
bám ở 2 bên bánh xe, công suất lớn hơn cho bánh xe có độ bám nhỏ, làm
thất thoát công suất. Nhiều giải pháp đã áp dụng, kiểm soát phân phối
công suất kéo bằng ABS giữ vai trò quan trọng và đang trở nên cấp thiết.
Mục tiêu nghiên cứu
Nghiên cứu kiểm soát phân phối công suất kéo khi xe chuyển động trên
đường có độ bám 2 bên bánh xe khác nhau. Đề xuất bộ điều khiển kiểm
soát phân phối công suất kéo trên ô tô con bằng ABS, phanh độc lập ở 2
bên bánh xe. Chế tạo mô hình HIL để kiểm chứng phương án đã đề xuất.
Đối tượng nghiên cứu
Nghiên cứu hệ thống truyền lực cầu sau chủ động trên xe Ford Maverick
2.0L-2003 có bộ chấp hành phanh ABS thủy lực cho cơ cấu phanh guốc.
Phạm vi nghiên cứu
Khi xe chuyển động thẳng trên đường bằng có độ bám 2 bên bánh xe
khác nhau, thử nghiệm kiểm soát phân phối công suất trên mô hình HIL.
Ý nghĩa khoa học của luận án
Xây dựng mô hình động lực học hệ thống truyền lực ô tô có kể đến vi
sai, mô hình bám giữa bánh xe và mặt đường. Khảo sát ảnh hưởng của vi
sai đến phân phối công suất kéo. Đề xuất mô hình kiểm soát phân phối
công suất kéo theo 2 phương pháp điều khiển PID và LQR. Thiết kế bộ
điều khiển phân tầng kiểm soát phân phối công suất kéo có kể đến bộ chấp
hành ABS. Chế tạo mô hình HIL thí nghiệm bộ điều khiển đã thiết kế.
Ý nghĩa thực tiễn của luận án
Kiểm soát phân phối công suất kéo bằng ABS đã áp dụng thực tế.
Nghiên cứu thiết kế, cải thiện chất lượng đều có ý nghĩa thực tiễn, làm
2
chủ công nghệ. Bộ điều khiển kiểm soát phân phối công suất kéo có thể
tiếp tục nghiên cứu và lắp đặt trên xe thực tế. Kết quả sử dụng làm tài
liệu tham khảo, học tập và nghiên cứu động lực học và điều khiển ô tô.
CHƯƠNG 1.TỔNG QUAN VẤN ĐỀ NGHIÊN CỨU
1.1. Tổng quan về vấn đề kiểm soát kéo trên ô tô
Vi sai được bố trí trong cầu chủ động, hộp phân phối để phân phối
công suất cho các bánh xe, cầu chủ động, đồng đảm bảo hai bánh xe, cầu
chủ động có thể quay với tốc độ khác nhau, tránh hiện tượng tuần hoàn
công suất. Tuy nhiên, bánh xe có bám nhỏ hơn, hoặc không có bán lại
được vi sai phân phối công suất nhiều hơn làm bánh xe bị trượt hoàn toàn
dẫn đến ô tô di chuyển được được, gây tổn hao công suất động cơ. Do đó,
trong một số trường hợp đặc biệt, cần kiểm soát phân phối công suất cho
các bánh xe chủ động, cầu chủ động để đảm bảo ô tô có thể chuyển động
được, nâng cao khả năng kéo.
1.2. Các giải pháp nâng cao khả năng kéo của ô tô
Hình 1.1: Các giải pháp nâng cao
khả năng kéo trên ô tô
Các giải pháp thể hiện trên
Hình 1.1, theo đó xu hướng kết hợp
kiểm soát bánh xe và động cơ đang
được quan tâm và phát triển.
1.2.1. Sử dụng vi sai nội ma
sát
Hình 1.2 thể hiện sơ đồ phân
tích tĩnh lực cầu chủ động sử dụng
vi sai nội ma sát khi một bên bánh
xe trên mặt đường có hệ số bám
thấp (φmin) và một bên có hệ số
bám cao (φmax).
Hình 1.2: Sơ đồ phân tích lực trên cầu chủ động
Khi tốc độ hai
bên bánh xe khác
nhau làm xuất hiện
mô men nội ma sát
Mms. Mô men trên
bán trục M3,M4
xác định như biểu
thức (1.1).

3
M3=M1
2−Mms
M4=M1
2+Mms
(1.1)
Lực kéo tiếp xúc giữa bánh xe và mặt đường xác định theo biểu thức (1.2)
F5=M3
rbx
=M1
2rbx
−Mms
rbx
F6=M4
rbx
=M1
2rbx
+Mms
rbx
(1.2)
Trường hợp F5< Fφmin , bánh xe trái có khả năng tiếp nhận hết lực
F5. Trường hợp F5=Fφmin , bánh xe trái bị trượt hoàn toàn. Từ Biểu
thức (1.2), lực kéo F6được xác định theo F5:
F6=F5+2Mms
rbx
=Fφmin +2Mms
rbx
(1.3)
Nếu Mms = 0,−→ Fx= 2Fφmin . Khi Fx= 2Fφmin < Fc, nhỏ hơn lực cản
tổng cộng của xe, ô tô không chuyển động. Để ô tô chuyển động được, ta
sử dụng vi sai có Mms. Hệ số khóa vi sai được định nghĩa theo công thức:
Kδ=M4−M3
M4+M3
=2Mms
M1
(1.4)
Khi Mms = 0, thì Kδ= 0; khi Mms = 0,5M1, thì Kδ= 1. Trường hợp
một bên bánh xe không có bám (Fφmin = 0), phải sử dụng hệ số khóa vi
sai Kδ= 1 (hay Mms = 0,5M1) để đảm bảo truyền hết mô men.
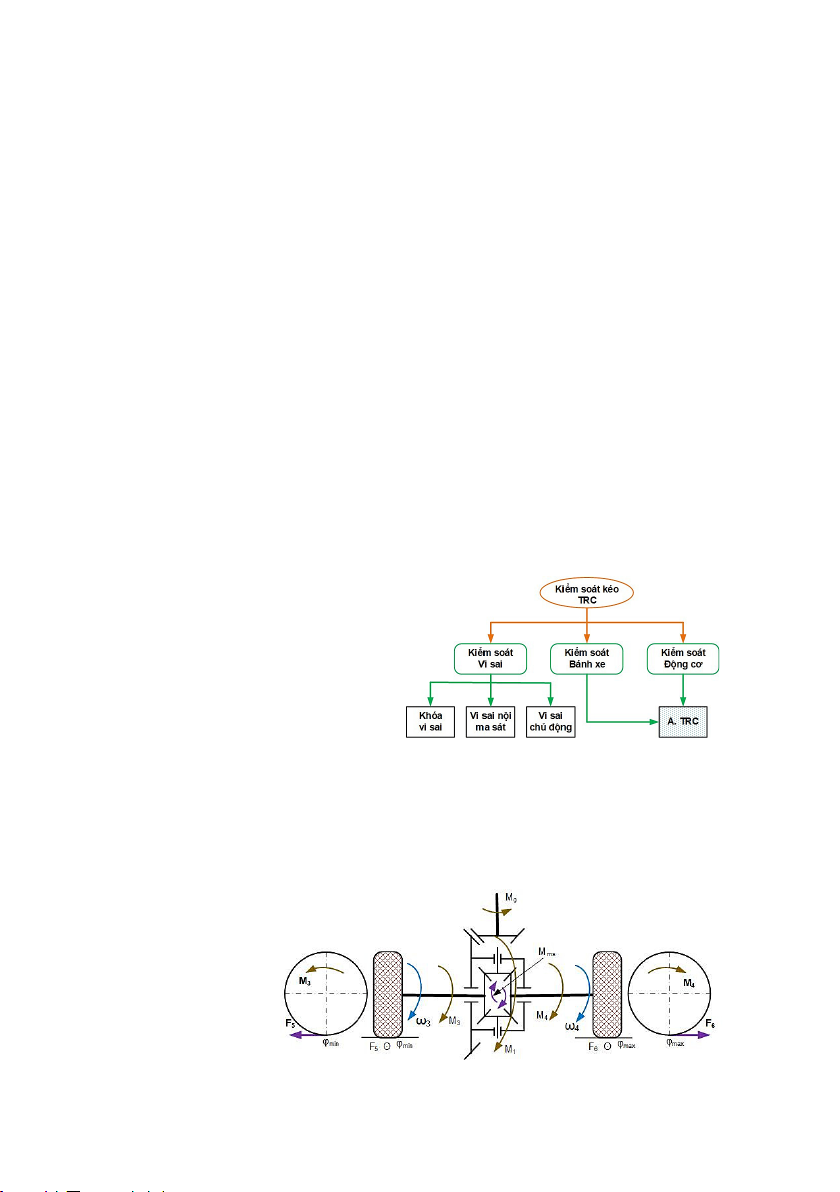
1.2.2. Sử dụng phanh độc lập trên bánh xe
Hình 1.3: Sơ đồ động lực học vi sai
đối xứng trên cầu chủ động
Phanh độc lập ở bánh xe có
bám thấp. Sơ đồ phân tích tĩnh
lực thể hiện trên Hình 1.3). Giả
sử bánh xe trái bám thấp, khi đó
Mp1= 0,Mp2= 0, mô men trên
bán trục trái/phải:
M3=M1
2−Mp1
M4=M1
2
(1.5)
Khi đó lực kéo trên đường bám tốt
F6được xác định theo lực kéo F5:
F6=M4
rbx
=M1
2rbx
=M1
2rbx
−Mp1
rbx +Mp1
rbx
=F5+Mp1
rbx
(1.6)

























