
Bài thí nghiệm Bộ môn Tự Động Đo Lường – Khoa Điện
Trường Đại Học Bách Khoa
Khoa Điện
Bộ môn Tự Động – Đo Lường
♣
♣
♣
♥
♣
♣
♣
BÀI THỰC HÀNH
ĐIỀU KHIỂN LOGIC
LƯU Ý!
Trước khi đến PTN yêu cầu mỗi Sinh Viên phải thực hiện thiết kế
trước chương trình ở nhà.
Biên soạn : Lâm Tăng Đức - Nguyễn Kim Ánh 190
Bài thí nghiệm Bộ môn Tự Động Đo Lường – Khoa Điện
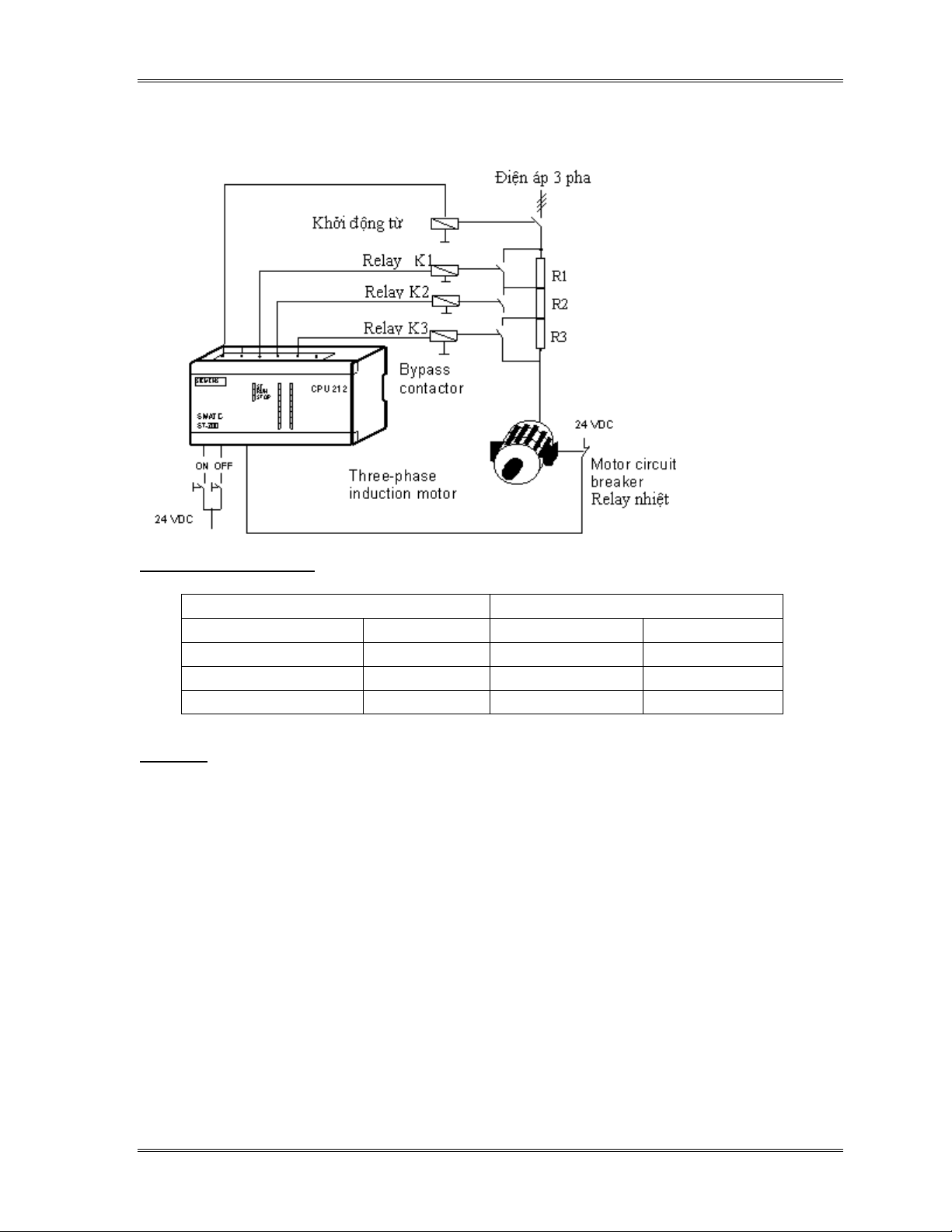
1. Khởi động động cơ bằng điện trở phụ:
Phân địa chỉ vào/ra:
Đầu vào (Input) Đầu ra (Output)
Start I0.0 Khởi động từ Q0.0
Stop I0.1 K1 Q0.1
Circuit Breaker I0.2 K2 Q0.2
K3 Q0.3
Yêu cầu:
Khởi động động cơ → Đóng khởi động từ → Sau 3s → Đóng Relay K1 →
Sau 2s → Đóng Relay K2 → Sau 2s → Đóng Relay K3 → Stop → Dừng động cơ,
đưa các Relay về trạng thái ban đầu.
Nếu động cơ đang hoạt động mà xảy ra sự cố ngắn mạch → Dừng ngay lập tức.
Biên soạn : Lâm Tăng Đức - Nguyễn Kim Ánh 191
Bài thí nghiệm Bộ môn Tự Động Đo Lường – Khoa Điện
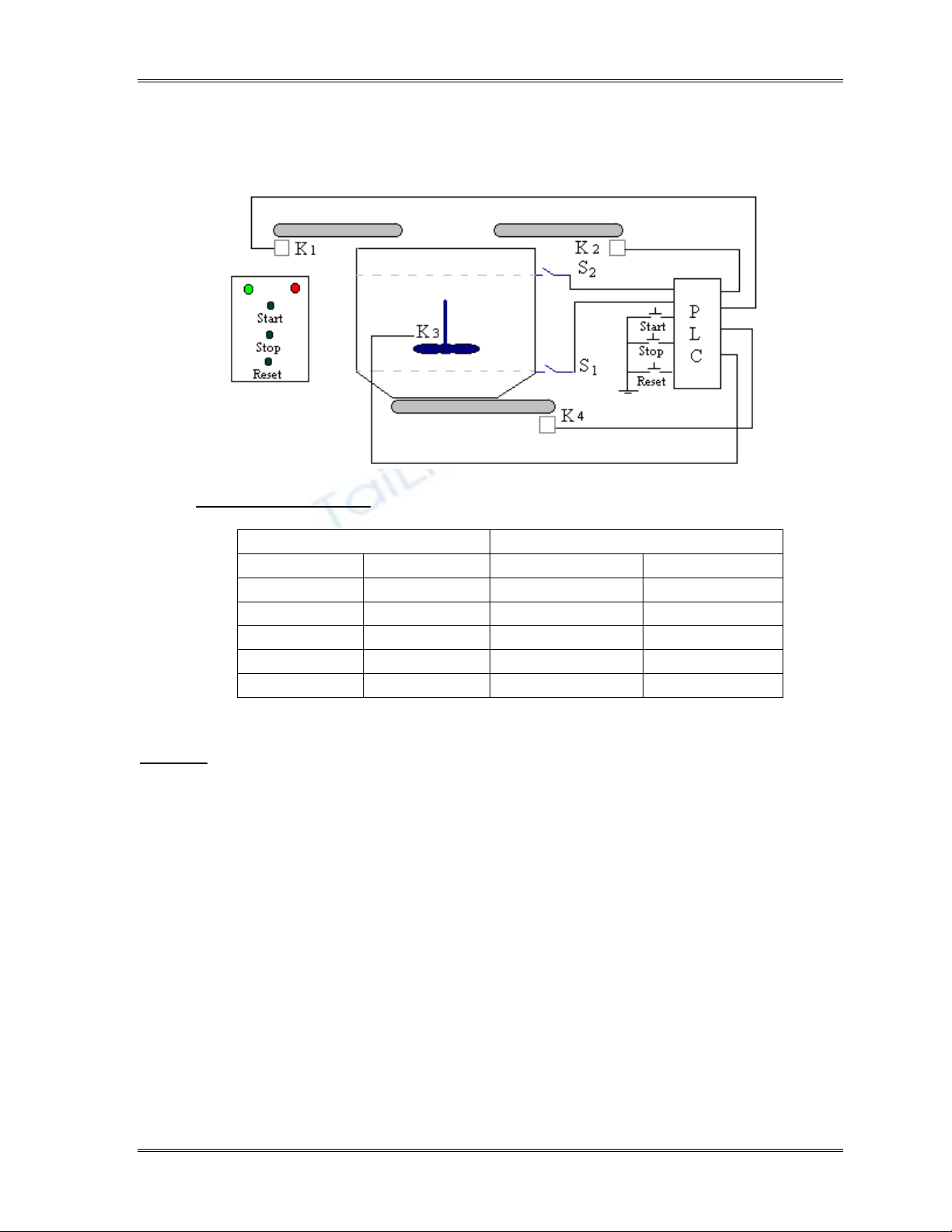
2. Mô hình điều khiển máy trộn liệu:
Phân địa chỉ vào/ra:
Đầu vào (Input) Đầu ra (Output)
Start I0.0 K1 Q0.0
Stop I0.1 K1 Q0.1
Reset I0.2 K3 Q0.2
S1 I0.3 K4 Q0.3
S2 I0.4 Đèn Run Q0.4
Đèn Stop Q0.5
Yêu cầu:
Khởi động → Đèn RUN sáng lên; K1, K2 khởi động, liệu khác nhau được cung
cấp bởi hai băng tải → S3 tác động → Dừng K1, K2; Khởi động K3 bắt đầu trộn →
Sau 15s → Dừng K3; Khởi động K4 để xuất liệu ra khỏi bình trộn → S2 xuống mức
thấp → K4 dừng; Qúa trình tự động lặp lại trong 2 lần nữa và tự động dừng hệ thống;
Đèn đỏ (đèn stop) sáng lên và xanh tắt đi.
Nếu đang làm việc bình thường mà gặp sự cố thì ấn Stop → dừng khẩn cấp hệ
thống; sau khi khắc phục xong, trước khi chạy lại phải ấn Reset để xoá giá trị cũ trong
thanh ghi tức thời của bộ đếm để bắt đầu lại từ đầu.
Biên soạn : Lâm Tăng Đức - Nguyễn Kim Ánh 192
Bài thí nghiệm Bộ môn Tự Động Đo Lường – Khoa Điện
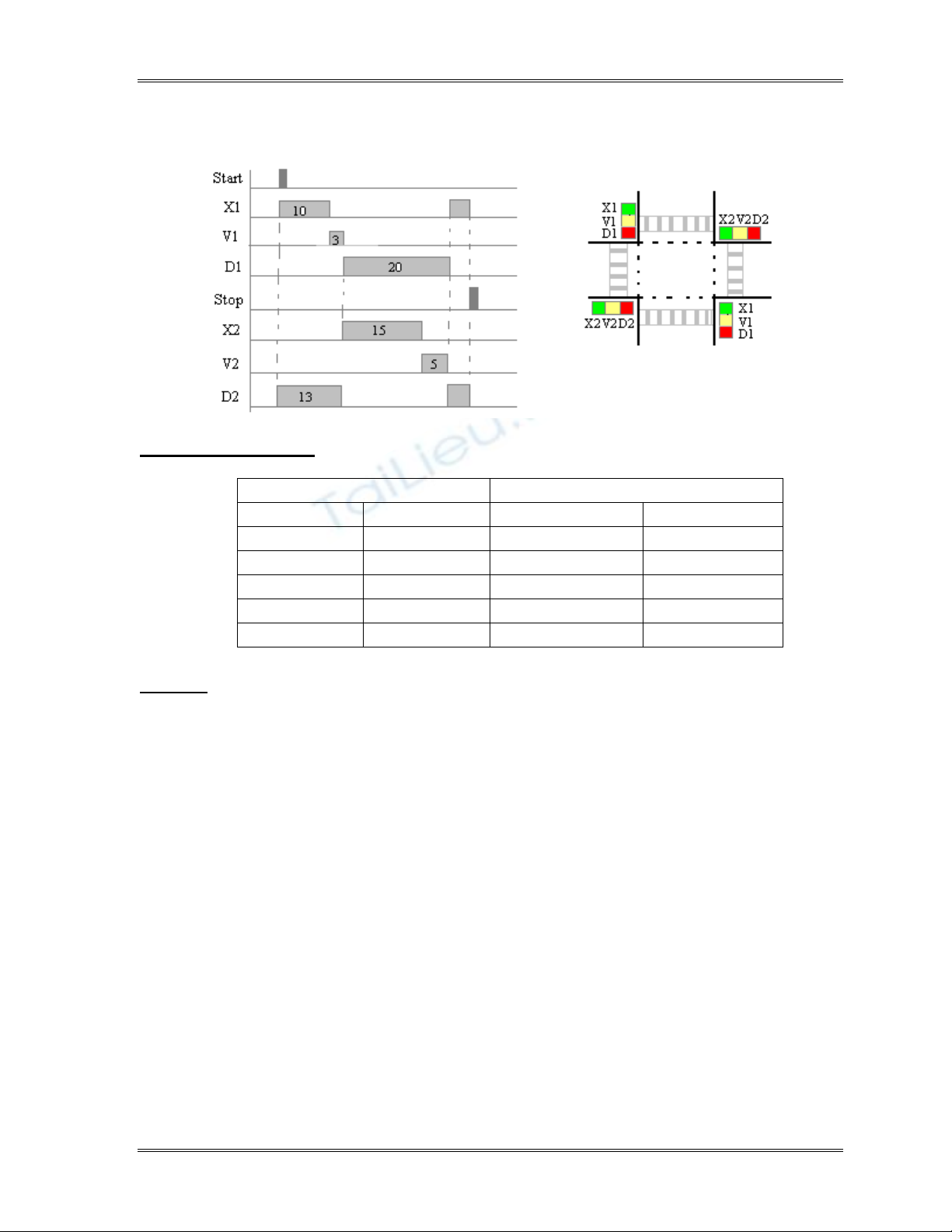
3. Mô hình điều khiển đèn giao thông:
Phân địa chỉ vào/ra:
Đầu vào (Input) Đầu ra (Output)
Start I0.0 Đèn Xanh 1 Q0.0
Stop I0.1 Đèn vàng 1 Q0.1
Đèn đỏ 1 Q0.2
Đèn Xanh 2 Q0.3
Đèn vàng 2 Q0.4
Đèn đỏ 2 Q0.5
Yêu cầu:
Điều khiển các đèn hoạt động theo giản đồ thời gian trên.
Biên soạn : Lâm Tăng Đức - Nguyễn Kim Ánh 193
Bài thí nghiệm Bộ môn Tự Động Đo Lường – Khoa Điện
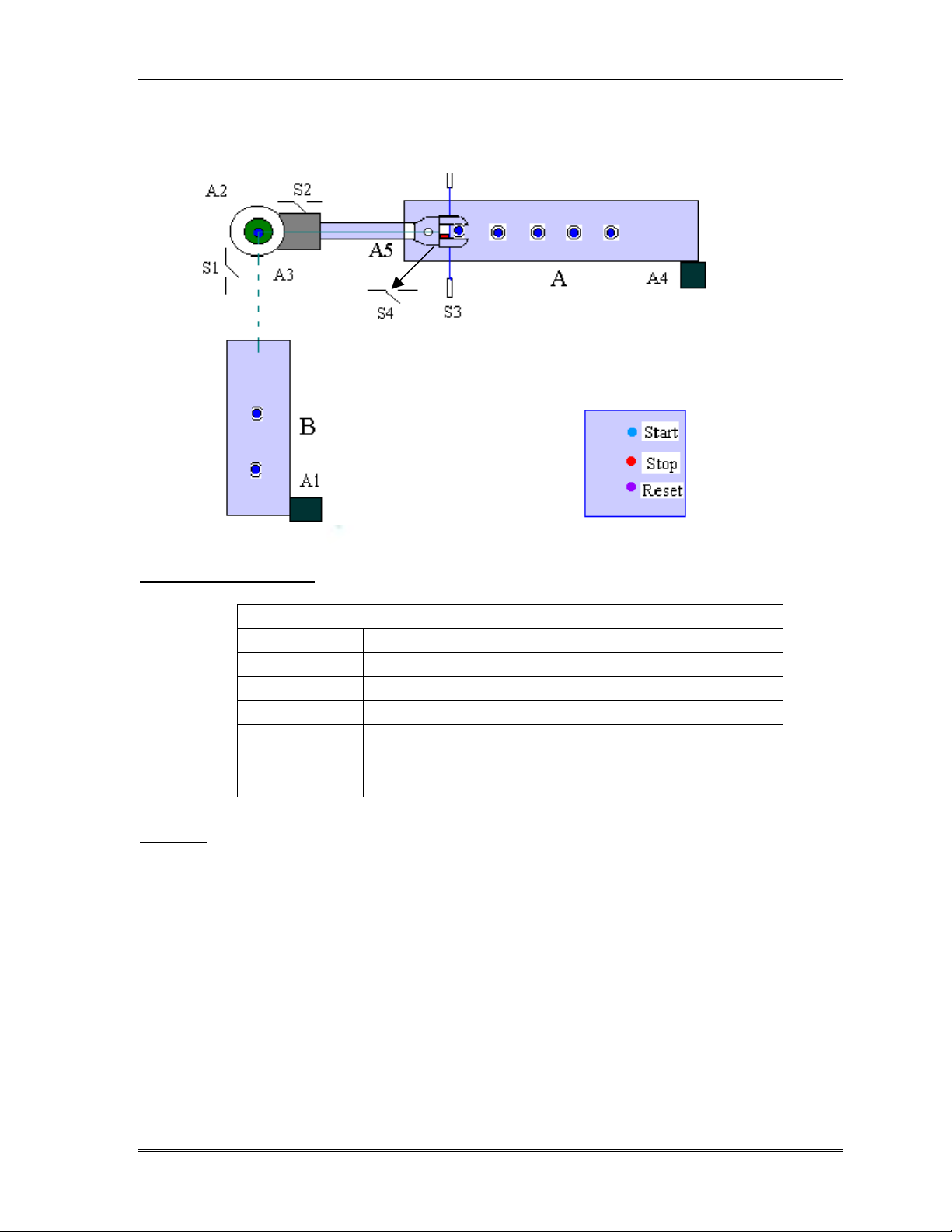
4. Mô hình điều khiển hoạt động của máy “gắp-đặt”:
Phân địa chỉ vào/ra:
Đầu vào (Input) Đầu ra (Output)
Start I0.0 A1 Q0.0
Stop I0.1 A2 Q0.1
Reset A3 Q0.2
S1 A4 Q0.3
S2 A5 Q0.4
S3
S4
Yêu cầu:
Cánh tay máy thực hiện gắp vật trên băng chuyền A bỏ sang băng chuyền B.
Trước khi xuất phát, vị trí của cánh tay ở vị trí băng chuyền B (S1 tác động).
Ấn nút Start → Cánh tay quay ngược chiều kim đồng hồ → S2 tác động →
Dừng quay, băng chuền A hoạt động → S3 tác động → Dừng băng chuyền A, gắp vật
(A5 = 1) → S4 tác động → Cánh tay quay cùng chiều kim đồng hồ → S1 tác động →
Dừng Quay, nhả vật (A5 = 0; S4 = 0); Sau đó thực hiện lặp lại hành trình như trên.
Khi có sự cố bất thường xảy ra, ấn Stop → Dừng hệ thống; sau khi khắc phục
xong sự cố → Ấn Reset → Cánh tay tự động quay về lại vị trí xuất phát ban đầu và
dừng tại đây.
Biên soạn : Lâm Tăng Đức - Nguyễn Kim Ánh 194


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)