410/31/2014
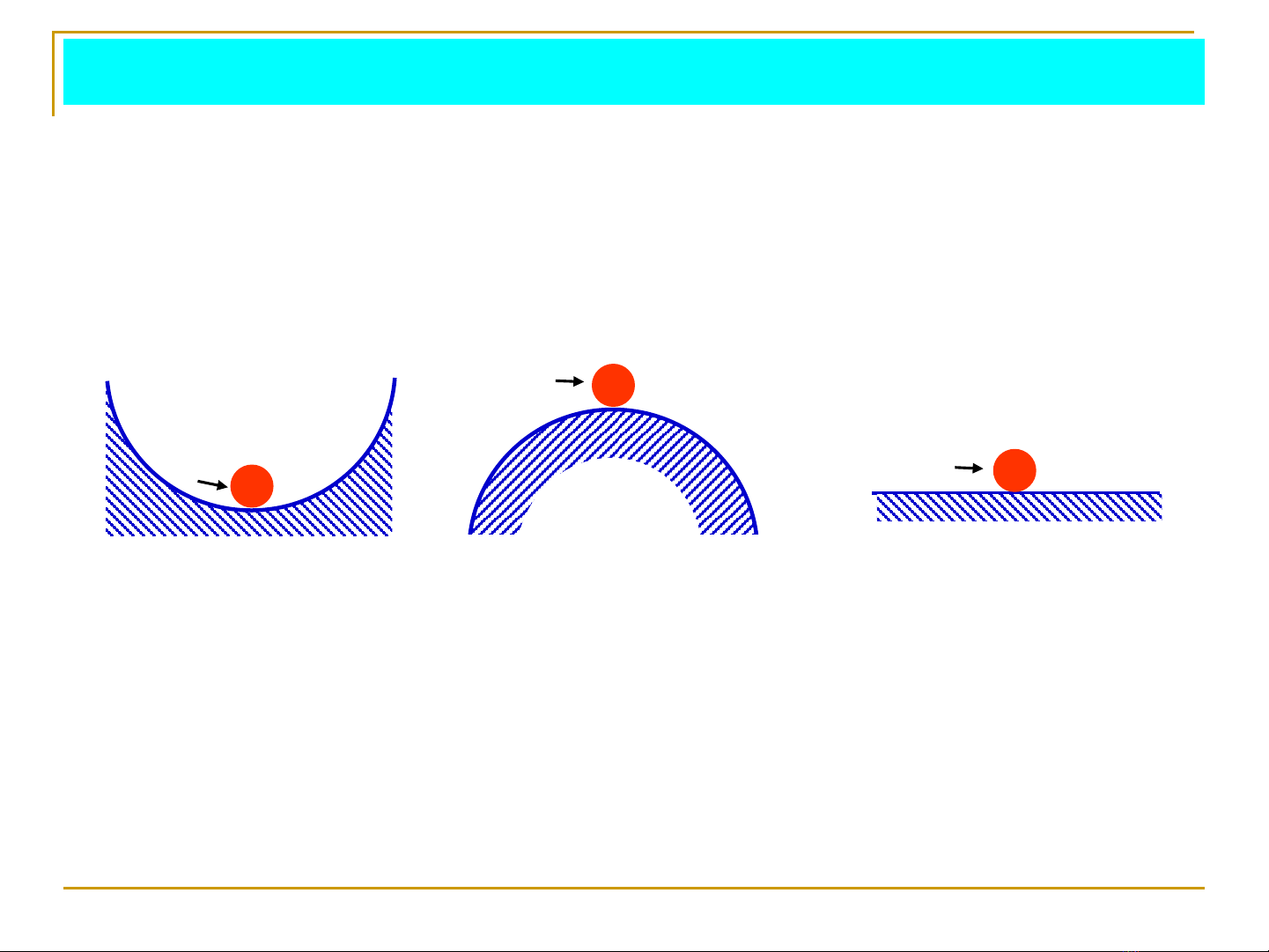
4.1 Khái niệm tính ổn định
Xét hệ thống tuyến tính có PTVP:
y0(t)_ là nghiệm riêng của PTVP.
yqđ(t)_ Là nghiệm tổng quát của PTVP khi vế phải bằng 0.
y(t) = y0(t) + yqđ (t)
11
1 0 1 0
11
nn
nn
nn
mm
mm
mm
d y d y d r d r
a a ... a y(t) b b ... b r(t)
dt dt dt dt
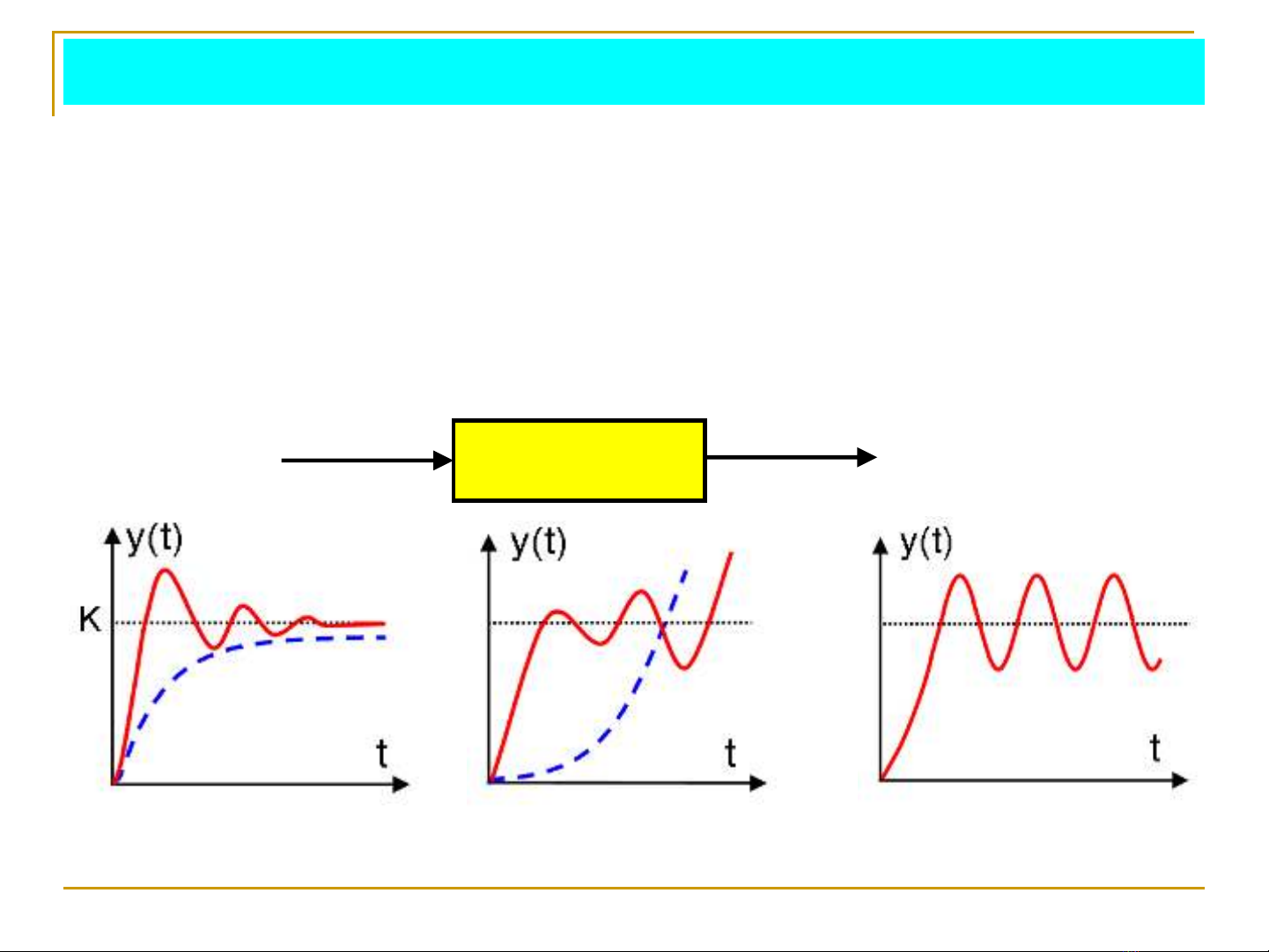
Đáp ứng của hệ cũng là nghiệm PTVP:
Ta thấy nếu r(t) hữu hạn thì y0(t) cũng hữu hạn, nên:
Tính ổn định của hệ chỉ phụ thuộc thành phần quá độ yqđ(t).
VD1, xét hệ có ptvp:
5 ( ) ( ) 2 ( )y t y t r t
Với r=1(t) thì y(t)= 2-2e-t/5 trong đó y0(t)=2 ; yqđ(t)=-2e-t/5
VD2, xét hệ có ptvp:
( ) 2 ( ) 5 ( ) 5 ( ) 5 ( )y t y t y t r t r t
y(t)= 1-e-tcos2t+2e-tsin2t = 1-(1/2+j)e(-1+2j)t - (1/2-j)e(-1-2j)t