HỆ THỐNG THU THẬP DỮ LIỆU ĐO LƯỜNG
Nội dung bài giảng :
Kỹ thuật cảm biến đo lường trong hệ thống CĐT
Phân loại cảm biến
Các thông số cơ bản của cảm biến
Cảm biến đo chuyển vị và chuyển động
Cảm biến đo lực, momen, xúc giác
Cảm biến nhiệt
Cảm biến siêu âm
Thiết bị sợi quang học
HỆ THỐNG THU THẬP DỮ LIỆU ĐO LƯỜNG
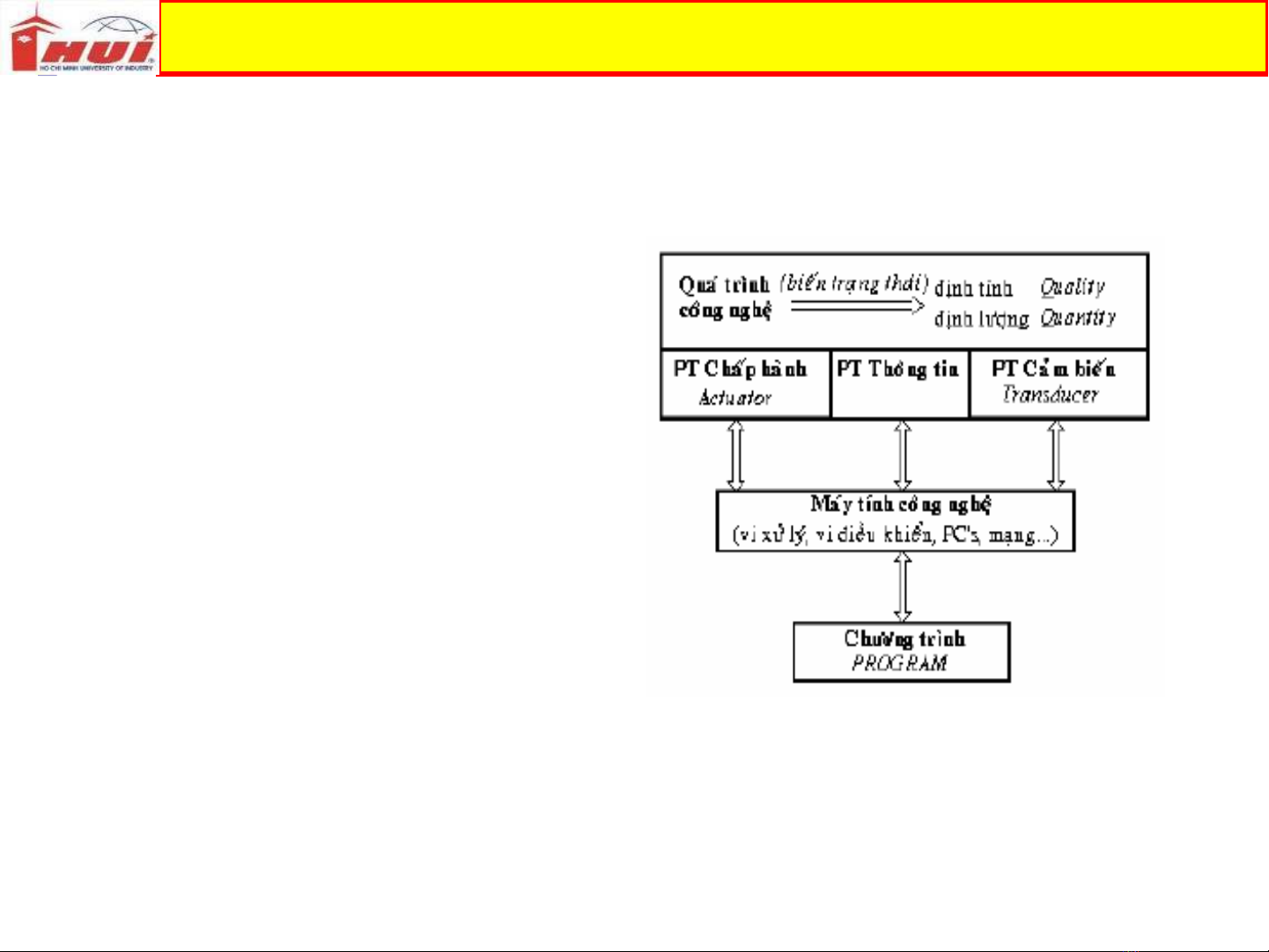
H.2.1. Mô hình ĐKTD c a QTCNủ
•QTCN là h v t lý đc mô t ệ ậ ượ ả
b i các bi n tr ng thái .Các bi n ở ế ạ ế
tr ng thái đc đc tr ng cho đnh ạ ượ ặ ư ị
tính ( quality ) và đnh l ng ị ượ
(Quantity )
C a QTCN b i PT toán lý ho c s ủ ở ặ ố
đo th c nghi m.ự ệ
1.1. Giới thiệu chung về cảm biến và đo lường.
•QTCN đc đi u khi n b i các ượ ề ể ở
HT đo l ng và ĐKTĐ ho t đng ườ ạ ộ
theo ch ng trình trên c s d ươ ơ ở ữ
li u thu đc t các PT c m bi n ệ ượ ừ ả ế
đo l ng ( Tranducer) và các tính ườ
năng c a các PT ch p hành ủ ấ
(actuator )
HỆ THỐNG THU THẬP DỮ LIỆU ĐO LƯỜNG
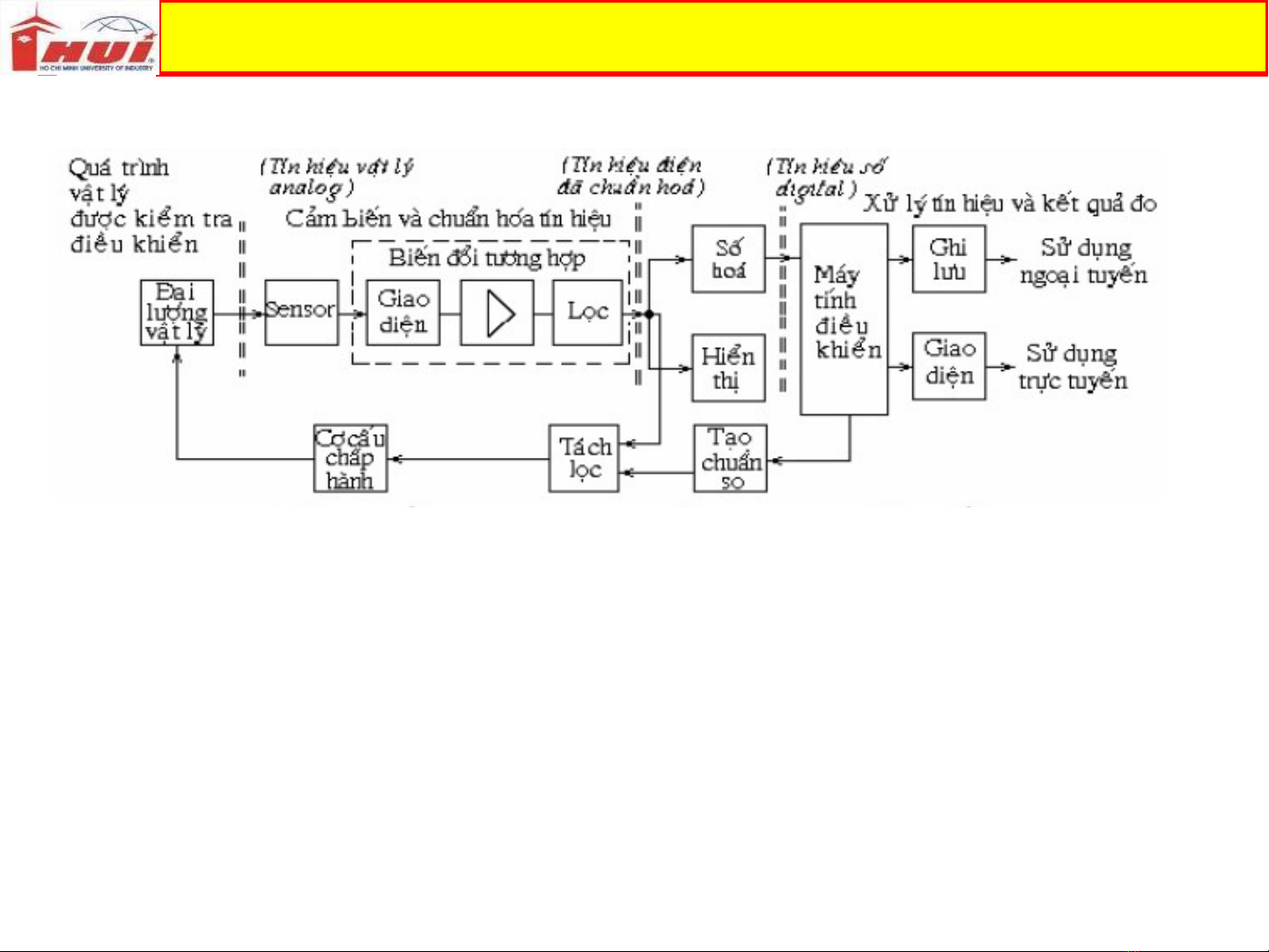
H.2.2. C u trúc đi n hình h th ng c m bi n đo l ng và ĐKTĐấ ể ệ ố ả ế ườ
1.1. Giới thiệu chung về cảm biến và đo lường.
S phát tri n c a ngành đi n t tin h c vi n thông, và các ự ể ủ ệ ử ọ ễ
m ng máy tính (c c b và di n rông ) đc s d ng cho h ạ ụ ộ ệ ượ ử ụ ệ
c m bi n đo l ng đi u khi n t đng đ đi u khi n các ả ế ườ ề ể ự ộ ể ề ể
QTCN cũng nh theo dõi giám sát quá trình .ư
HỆ THỐNG THU THẬP DỮ LIỆU ĐO LƯỜNG
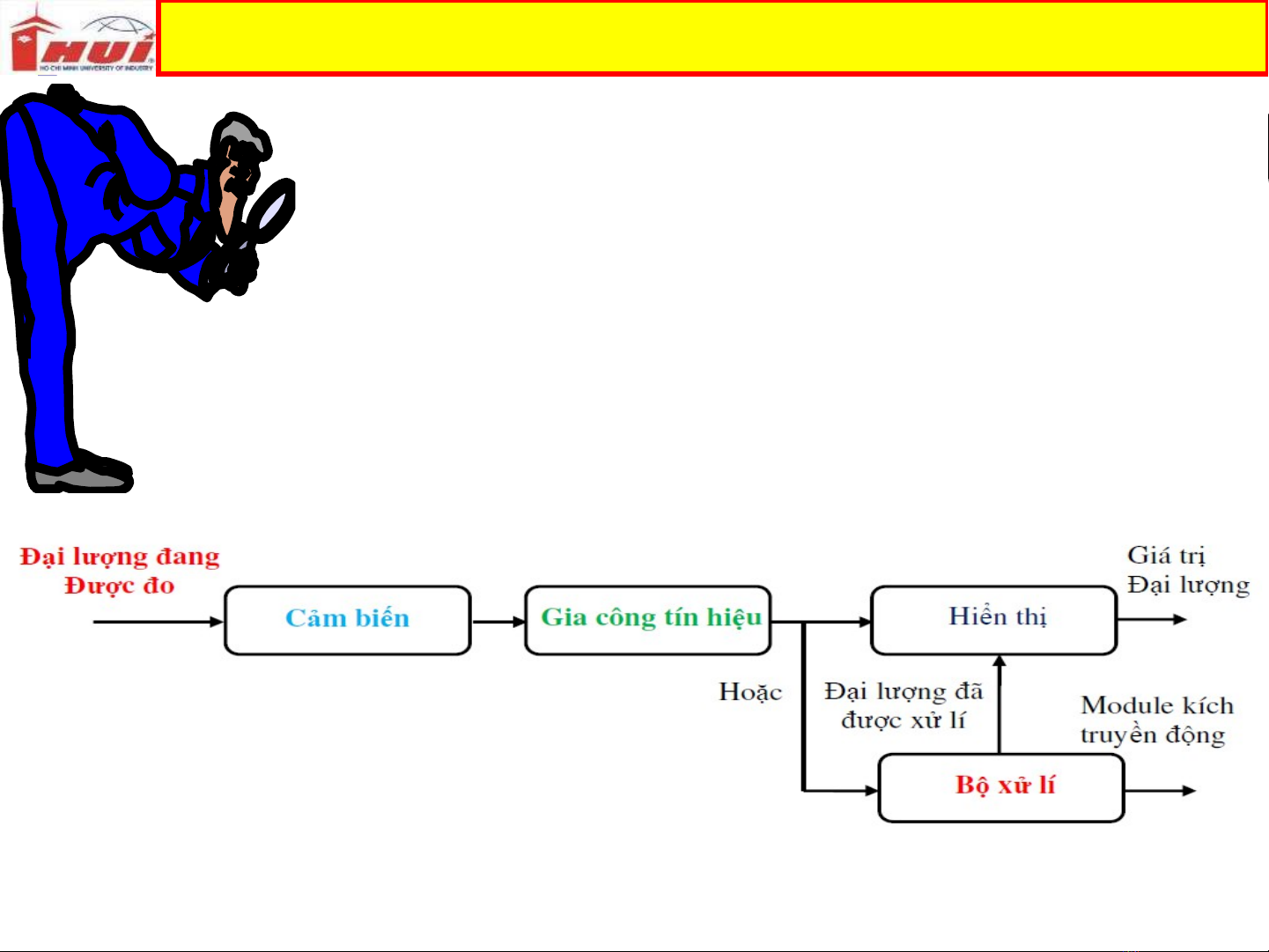
1.2 Các ph n t c a H th ng đo l ng đi u ầ ử ủ ệ ố ườ ề
khi n ể
• H th ng đo l ng c m bi n g m 3 thành ph n :ệ ố ườ ả ế ồ ầ
•C m bi n ( Sensor)ả ế
•Gia công tín hi u ( Signal Conditioning )ệ
•H th ng hi n th (Display System ) ệ ố ể ị
•B vi x lý ( Processor)ộ ử
H.2.1. H th ng đo và các thành ph nệ ố ầ
1.1. Giới thiệu chung về cảm biến và bộ chuyển đổi.
1. K thu t c m bi n đo l ng trong HT-CĐTỹ ậ ả ế ườ
HỆ THỐNG THU THẬP DỮ LIỆU ĐO LƯỜNG
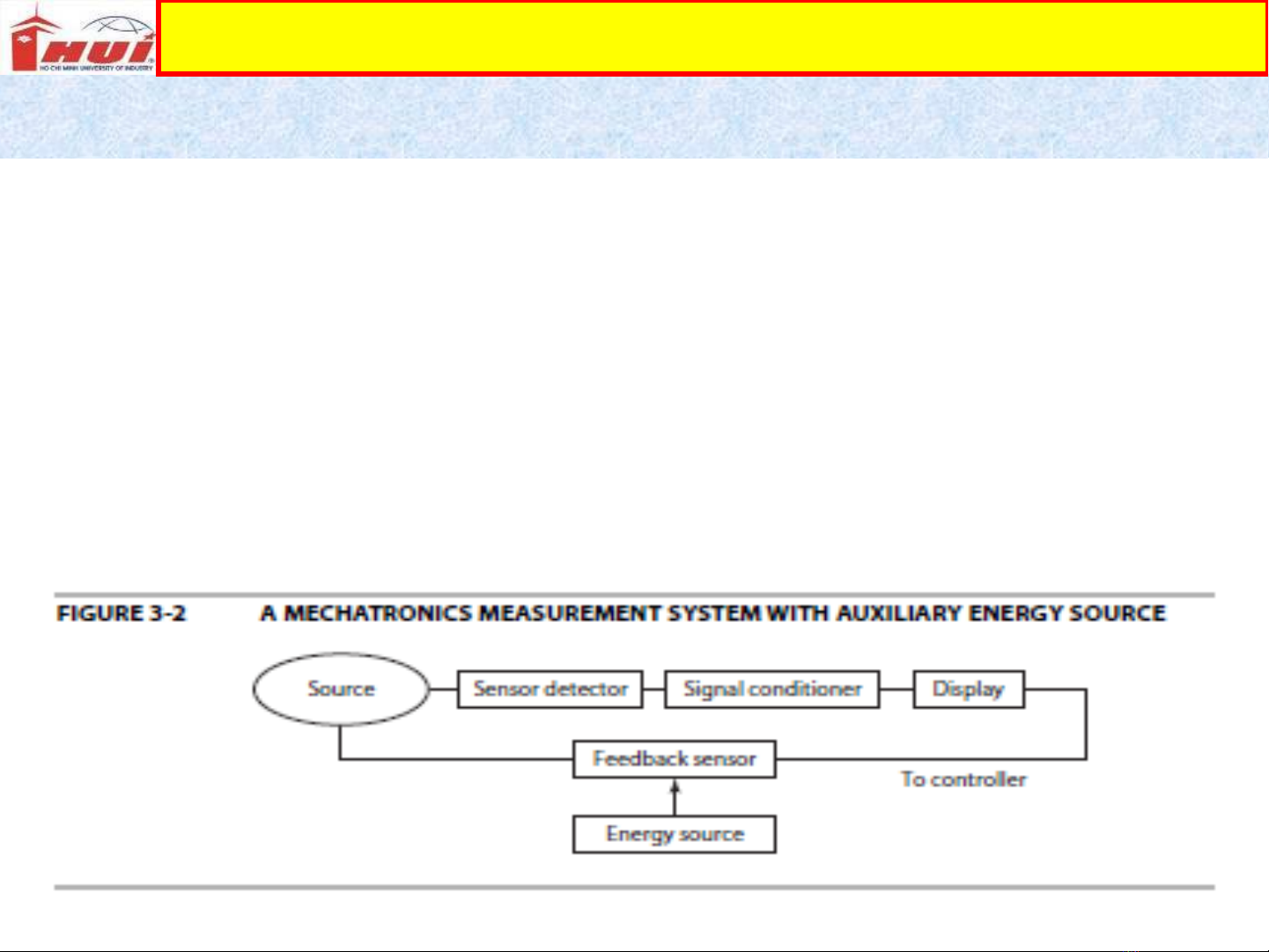
H.2.1: H đo l ng c đi n t v i b ngu n phệ ườ ơ ệ ử ớ ộ ồ ụ
Hai thành ph n c b n c a h th ng đi u khi n hi n đi là:ầ ơ ả ủ ệ ố ề ể ệ ạ
• C m bi n ( Sensor) : c m nh n các đi l ng đo và chuy n đi ả ế ả ậ ạ ượ ể ổ
thành tín hi u t ng ng t i đu ra ( th ng tín hi u đi n ). Đ ệ ươ ứ ạ ầ ườ ệ ệ ộ
chính xác t i đa c a h th ng đi u khi n b ng t ng đ nh y c a ố ủ ệ ố ề ể ằ ổ ộ ạ ủ
t ng c m bi n và đ nhi u bên trong c a nó.ừ ả ế ộ ễ ủ





![Bài giảng Ước lượng độ không đảm bảo của phép đo [chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2014/20141115/cuong-1981/135x160/6641415997016.jpg)













![Đề thi học kì 2 môn Vật lí 1 năm 2023-2024 có đáp án [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260507/hoahongxanh0906/135x160/64291778553454.jpg)
![Đề thi học kì 2 Vật lí 1 năm 2023-2024 có đáp án [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260507/hoahongxanh0906/135x160/1381778553461.jpg)
![Đề thi học kì 2 Vật lí 1 năm 2022-2023 có đáp án [kèm PDF]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260507/hoahongxanh0906/135x160/21778553462.jpg)


%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)