
1Lecture 10
BÀI GIẢNG
Biến Đổi Năng Lượng Điện Cơ
TS. HồPhạm Huy Ánh
TS. Nguyễn Quang Nam
March 2010
http://www4.hcmut.edu.vn/~hphanh/teach.html

2Lecture 10
¾Máy điện DC nói chung tiện dùng nhờ điều khiển tốc độ đơn giản và có đặc
tính cơ mô men-tốc độ rất linh hoạt. Dây quấn stator (cuộn kích từ) và dây quấn
rotor (phần ứng) đều dùng nguồn DC.
¾Tuy vậy với cùng thông sốcông suất, máy điện DC vẫn mắc hơn máy điện AC.
Hiện nay với nhiều máy điện DC công suất nhỏ, cuộn kích từcồng kềnh đã được
thay bằng lõi từ thường trực.
¾Cuộn kích từstator hoặc lõi từ thường trực được dùng để tạo từ trường tĩnh,
trong khi dòng cấp cho phần ứng rotor phải qua hệthống chổi than cổgóp. Hệ
thống chổi than cổgóp đóng vai trò như bộchỉnh lưu bảo đảm từ trường rotor và
stator luôn vuông góc nhau. Nhờ đó giúp mô men kéo đạt trịcực đại với gía trị
dòng nhất định, đồng thời cho phép thuật toán điều khiển vận tốc khá đơn giản.
¾Ngoài ra các động cơ vạn năng cho phép vận hành với cả điện AC và DC cũng
được xem là máy điện DC do có cấu tạo thực chất là máy điện DC kích từnối
tiếp.
Máy Điện DC – Giới thiệu chung

3Lecture 10
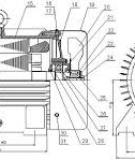
Cấu tạo máy điện DC
Ổđỡ
Rãnh phầnứng
đượcđúc xiên
Cổgóp
¾Mạch từphần ứng được ghép
từnhiều lá thép mỏng với các
rãnh để lồng dây quấn rotor. Các
đầu cuộn dây được đấu vào lá
đồng cổgóp theo kiểu quấn rãi
hay quấn xếp tùy thiết kế.
¾Lõi thép stator được đúc đặc
do nhận dòng kích từDC. Lỏi
thép này được cố định theo võ
máy.
Chổithan

4Lecture 10
¾Khảo sát máy điện DC có cấu tạo đơn
giản như hình minh họa bên phải.
¾Mỗi đầu cuộn dây được đấu vào lá
đồng cổgóp khác nhau.
¾Khi hai cạnh dây quấn rotor đảo cực
khi quay, lá đồng cổgóp tương ứng của
chúng cũng đảo đầu ra chổi than. Nhờ đó
dòng qua 2 cạnh dây quấn rotor cũng
được đảo chiều, bảo đảm chiều mô men
tác động lên cạnh dây quấn rotor như cũ,
bất chấp cực tính mạch từ thay đổi.
Nguyên lý vận hành máy điện DC
Cặpcựcmạch từtĩnh
Dây quấn rotor
Cổgóp
Chổithan
¾ Theo phương pháp đồng năng lượng, ta có:
()
(
)
θ
θ
θ
d
dL
iiiiT sr
srsr
e=,,

5Lecture 10
¾Cấu trúc thực của máy điện DC có cổgóp gồm nhiều lá đồng nối với đầu cuối dây
quấn rotor (xem Fig. 8.4 của GT). Hệthống chổi than cổgóp hình thành trục từ trường
phần ứng luôn vuông góc với trục từ trường của mạch kích stator ÖDuy trì được độ lớn
mô men tối đa với chiều ổn định.
¾Biểu thức tính mô men cho thấy độ lớn mô men tỉlệvới dòng rotor iavà dòng stator if:
Xây dựng phương trình đặc trưng của máy điện DC
fa
eiGiT =
¾Ta xây dựng hệ phương trình động từmạch tương đương của máy điện DC:
dt
di
LiRv f
ffff +=
fm
a
aaaa iG
dt
di
LiRv
ω
++=
Gωmif
LaRa
va
+
_
ia
Rf
Lf
+_
vf
if
Sứcphảnđiệnđộng
(Back EMF)
![Động cơ điện không đồng bộ 3 pha roto lồng sốc: Đặc tính kỹ thuật [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2017/20170305/nvtamanhs11/135x160/3841488728348.jpg)






![Tổng quan về máy phát điện xoay chiều [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20131213/lethanhvinh1992/135x160/1161386937357.jpg)
![Động cơ điện xoay chiều đồng bộ 3 pha - Chương 9: [Nội dung chi tiết/Hướng dẫn/Tìm hiểu]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20131023/080893/135x160/2791382466320.jpg)
















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)