
THÍ NGHIỆM MÔN
NHẬP MÔN CƠ ĐIỆN TỬ
Bộ môn Cơ Điện tử, Viện Cơ Khí
Nhóm biên Soạn:
TS. Phạm Đức An
TS. Nhã Tường Linh
TS. Nguyễn Xuân Thuận
Ths. Nguyễn Hữu Long
Ths. Thân Hoàng Bảo Lâm

3
BÀI 1 HỆ THỐNG CƠ ĐIỆN TỬ - GIỚI THIỆU DOBOT
MAGICIAN VÀ KIT LẬP TRÌNH MTS 101
1.1 MỤC ĐÍCH
Khi hoàn thành xong bài thực hành này, sinh viên sẽ có thể hiểu rõ các bộ phận cấu thành của một hệ
thống cơ điện tử (cảm biến, cơ cấu chấp hành, bộ phận điều khiển …), và qui trình tích hợp các bộ phận
trong hệ thống.
1.2 CƠ SỞ LÝ THUYẾT
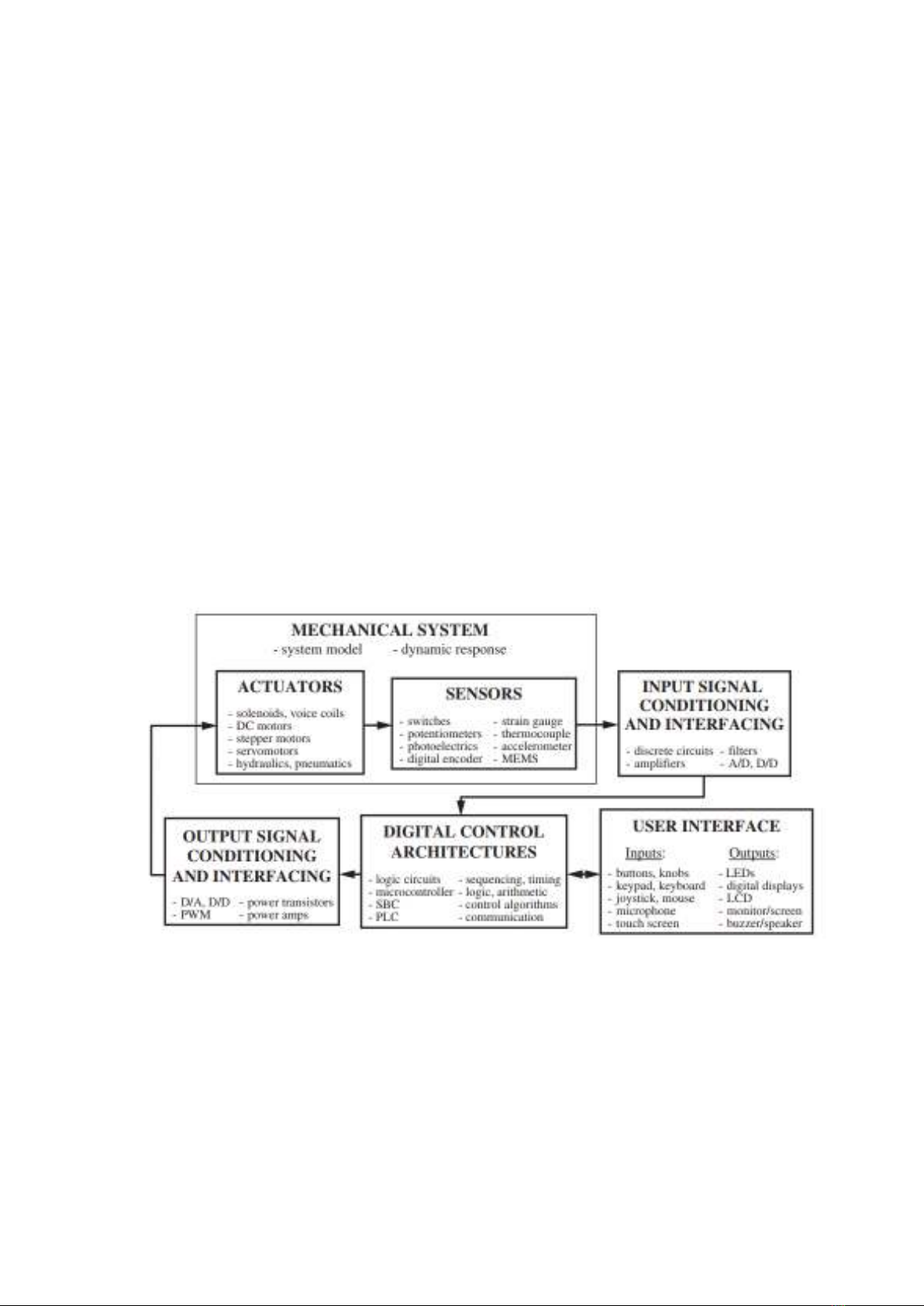
Cấu trúc của một hệ thống cơ điện tử bào gồm các thành phần cơ bản như hính 1.1. Trong đó cơ cấu chấp
hành (actuator) và cảm biến (sensor) thường kết nối với chi tiết cơ khí trong hệ thống cơ khí để tạo ra các
chuyển động và giám sát chuyển động các chi tiết cơ khí cũng như của cả hệ cơ khí. Các cơ cấu chấp hành
tạo ra chuyển động trong khi các cảm biến phát hiện trạng thái của cơ cấu chấp hành trong hệ thống cơ khí,
đồng thời cung cấp thông tin về tham số đầu vào và đầu ra của hệ thống cơ khí; Các mạch giao tiếp và xử
lý tín hiệu (signal conditioning and interfaceing) làm nhiệm vụ truyền dẫn thông tin từ đầu vào và đầu ra
được nhận biết từ cảm biến đến hệ điều khiển số (Digital control) để đưa ra quyết định điều khiển phù hợp
và truyền đến các hệ truyền động thông qua các mạch giao tiếp và xử lý tín hiệu; Giao diện người dùng
(User Interface) cho phép nhập thủ công và cung cấp màn hình đồ họa hoặc phản hồi trực quan cho người
dùng
Hình 1.1 Hệ thống cơ điện tử
1.2.1 Cơ cấu chấp hành và cảm biến:
+ Cơ cấu chấp hành (actuator): là phần “cơ bắp” trong hệ thống cơ điện tử. Cơ cấu này nhận lệnh
điều khiển (chủ yếu là tín hiệu điện) và tạo ra sự thay đổi (theo yêu cầu) trong hệ vật lý bằng cách tạo ra
các lực, chuyển động, nhiệt dòng chảy …v..v..
Gồm các loại cơ cấu chấp hành sau: Cơ cấu chấp hành cơ khí (bộ truyền bánh răng, bộ truyền đai,
bộ truyền xích, cơ cấu khâu khớp …), cơ cấu chấp hành thủy lực, khí nén (xi lanh khí nén, xi lanh thủy lực,

4
mô tơ thủy lực, mô tơ khí, ly hợp thủy lực …), cơ cấu chấp hành điện (động cơ một chiều, xoay chiều,
động cơ bước, động cơ servo, van điện từ…).
+ Cảm biến (sensor): là thiết bị dùng để cảm nhận biến đổi các đại lượng vật lý và các đại lượng
không có tính chất điện thành các đại lượng điện có thể đo và xử lý được.
Gồm các cảm biến thông dụng sau: Cảm biến nhiệt độ, cảm biến tiệm cận, cảm biến hống ngoại,
cảm biến áp suất, cảm biến vị trí, cảm biến quang, cảm biến hình ảnh …
Trong bài thực hành này, đi tiến hành phân tích cơ cấu chấp hành và cảm biến trên trên cách tay 4
bậc tự do (Dobot Robotic Arm).
1.2.2 Hệ điều khiển số (Digital control)
+ Bộ phần điều khiển: là một phần không thể thiếu một hệ cơ điện tử. Nói cách khác là bộ não của
một thiết bị cơ điện tử và có chức năng điều khiển phần lớn các thao tác của hệ thống.
+ Hiện nay thiết bị điều khiển thông dụng là PLC (Programmable Logic Controller) và vi điều
khiển. Trong phần thực hành này, kit lập trình điều khiển (Arduino MTS-101) được sử dụng để minh họa.
1.2.3 Giao diện người dùng (User Interface).
+ Bộ phần hiền thị: là bộ phận giám sát các thông số của hệ thống, ở mức độ cao có điều khiển các
thông số của hệ thống.
+ Các thiết bị, bộ phận hiền thị thông dụng: Led 7 đoạn, LCD, HMI (Human-Machine-Interface).
Trong bài thực hành này, giao diện người dùng của robot (Dobot Robotic Arm), sẽ được mô tả và
các thiết bị hiển thị tích hợp trên MTS101 cũng được giới thiệu chi tiết.
1.3 THIẾT BỊ CẦN THIẾT
DOBOT MAGICIAN
Kit lập trình điều khiển MTS101
1.4 TÀI LIỆU CẦN THIẾT
Bài thực hành do đơn vị phụ trách cấp
Hướng dẫn sử dụng bộ Kit vi điều khiển MTS-01
Bảng thông số của các KIT và các cảm biến và cơ cấu chấp hành
1.5 TRÌNH TỰ TIẾN HÀNH THÍ NGHIỆM
1.5.1 Tổng quan DOBOT MAGICIAN
Dobot Magician là một cánh tay robot để bàn đa chức năng dành cho giáo dục đào tạo thực tế, hỗ
trợ Teaching & Playback, lập trình đồ họa khối, script. v.v… Được cài đặt với các bộ hiệu ứng khác nhau.
Dobot Magician có thể thực hiện các chức năng thú vị như in 3D, khắc laser, viết và vẽ. Nó cũng hỗ trợ
phát triển thứ cấp bằng việc mở rộng các giao diện I/O khác nhau. Điều này làm tăng sự sáng tạo và trí
tưởng tượng cho người dùng một cách không giới hạn.
Tên
Dobot Magician
Tải tối đa
500 g
5
Phạm vi tiếp cận tối đa
320mm
Phạm vi chuyển động
Chân đế
-90° ~ +90°
Cánh tay sau
-0° ~ 85°
Cánh tay trước
-10° ~ +90°
Vòng xoay phần công tác
-90° ~ +90°
Tốc độ tối (Với tải
trọng 250g)
Tốc độ quay của cánh tay sau,
cánh tay trước và chân đế
320°/s
Tốc độ quay của servo
480°
Độ chính xác lặp lại
0.2mm
Nguồn cấp
100V – 240V AC, 50/60 Hz
Nguồn bên trong
12V/7A DC
Kết nối
USB, WIFI, Bluetooth
I/O
20 giao diện I/O có thể mở rộng
Phần mềm
DobotStudio
Nhiệt độ làm việc
-10°C ~ 60°C
Bảng 1.1 Các thông số kỹ thuật
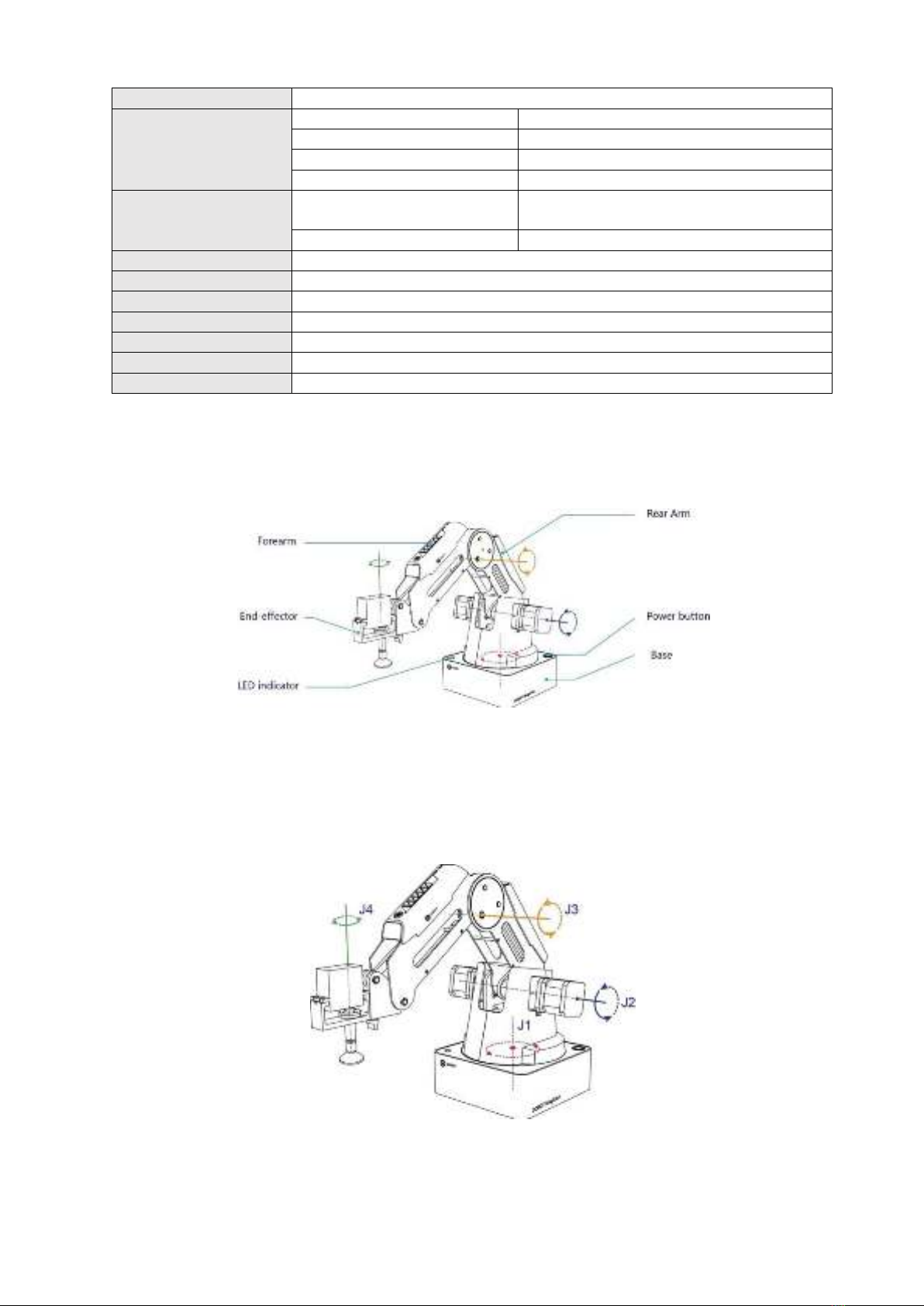
1.5.1.1 Hình thức và cấu tạo
Dobot Magician bao gồm: Chân đế (Base), Cánh tay sau (Rear Arm), Cánh tay trước (Forearm)
và khâu tác động cuối (End-effector). Như hình 1.2
Hình 1. 2 Hình thức của một Dobot Magician
Dobot Magician có hai loại hệ tọa độ, một hệ khớp xoay (joint) và một hệ tọa độ Cartesian. Như
hình 1.3 và hình 1.4.
Hình 1.3 Hệ tọa độ khớp xoay (Joint)
























![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)