
Nội Dung
Các thao tác cơ bản trên máy kinh vĩ
Kiểm nghiệm và hiệu chỉnh máy kinh vĩ
Phương pháp đo góc bằng
3
4
5
Nguyên lý đo góc
1
Cấu tạo của máy kinh vĩ
2
Phương pháp đo góc đứng
6
6
Phương pháp đo khoảng cách, chênh cao bằng máy kinh vĩ và mia
7
Sai số khi đo góc và biện pháp khắc phục
8
8.1. Nguyên lý đo góc
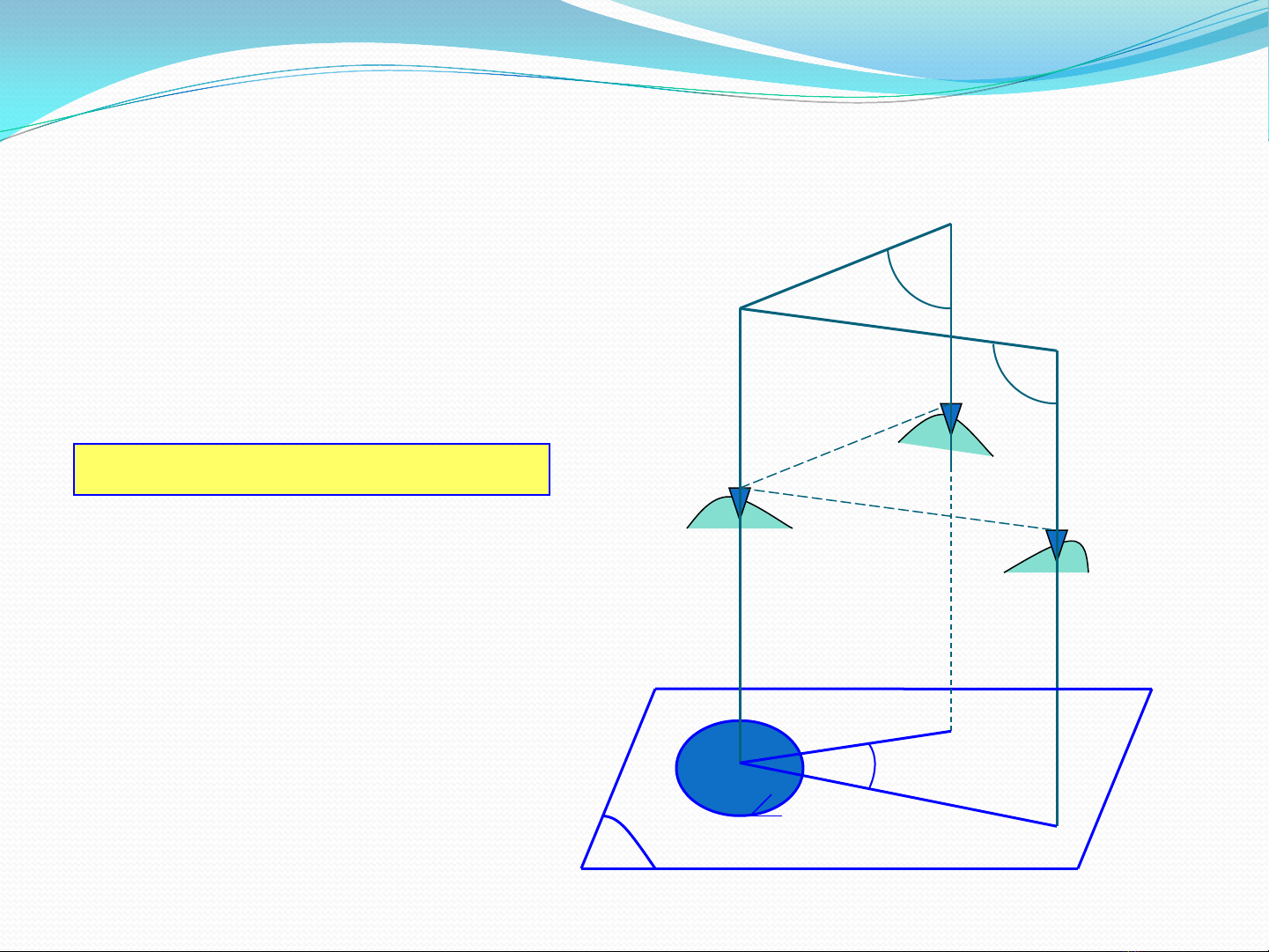
1.Nguyên lý đo góc bằng
a. Góc bằng
b. Nguyên lý đo góc bằng
n
m
O
B
A
O1
A1
B1
Q
R
P
AOB = = m - n










![Quy hoạch tổng thể Cà Mau: Tài liệu [mới nhất/chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250827/tghong1621@gmail.com/135x160/49401756278390.jpg)
![Bài giảng Hàng hải địa văn [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250729/vijiraiya/135x160/43361753782101.jpg)


![Atlas tài nguyên nước Việt Nam: Tài liệu [Mô tả/Hướng dẫn/Chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250715/vijiraiya/135x160/348_tai-lieu-atlas-tai-nguyen-nuoc-viet-nam.jpg)
![Hệ thống câu hỏi ôn tập Vùng kinh tế [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250709/kimphuong1001/135x160/76921752140578.jpg)







