Các mô hình d li u Gisữ ệ
Trong các mô hình bi u di n d li u c a GIS, chúng ta th ng nh c đ n m t khái ni m làể ễ ữ ệ ủ ườ ắ ế ộ ệ
feature. Theo đ nh nghĩa c a ISO (International Standard Organization): “Feature là s tr uị ủ ự ừ
t ng hoá c a m t s v t trong th gi i th c. Trong đó, thu c tính c a feature chính là đ cượ ủ ộ ự ậ ế ớ ự ộ ủ ặ
đi m mô t feature đó”.ể ả
Có 3 cách mô hình d li u trong GIS:ữ ệ
•Modelling with vector data: mô hình d li u vectorữ ệ
•Modelling with taster data: mô hình d li u rasterữ ệ
•Modelling with triangulated data: mô hình TIN
1. Mô hình d li u vectorữ ệ
Mô hình d li u vector xem các s v t, hi n t ng là t p các th c th không gian c s và tữ ệ ự ậ ệ ượ ậ ự ể ơ ở ổ
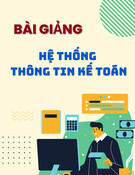
h p c a chúng. Trong mô hình 2D thì các th c th c s bao g m: đi m (point), đ ng (line),ợ ủ ự ể ơ ở ồ ể ườ
vùng (polygon). Các th c th s đ ng đ c hình thành trên c s các vector hay to đ c aự ể ở ẳ ượ ở ở ạ ộ ủ
các đi m trong m t h tr c to đ nào đó. ể ộ ệ ụ ạ ộ
Lo i th c th c s đ c s d ng ph thu c vào t l quan sát hay m c đ khái quát. V iạ ự ể ơ ở ượ ử ụ ụ ộ ỷ ệ ứ ộ ớ
b n đ có t l nh thì thành ph đ c bi u di n b ng đi m (point), đ ng đi, sông ngòiả ồ ỷ ệ ỏ ố ượ ể ễ ằ ể ườ
đ c bi u di n b ng đ ng (line). Khi t l thay đ i kéo theo s thay đ i v th c th bi uượ ể ễ ằ ườ ỷ ệ ổ ự ổ ề ự ể ể
di n. Thành ph lúc này s đ c bi u di n b i vùng có đ ng ranh gi i. Khi t l l n h n,ễ ố ẽ ượ ể ễ ở ườ ớ ỷ ệ ớ ơ
thành ph có th đ c bi u di n b i t p các th c th t o nên các đ i t ng nhà c a, đ ngố ể ượ ể ễ ở ậ ự ể ạ ố ượ ử ườ
sá, các trình ti n ích,… Nói chung mô hình d li u vector s d ng các đo n th ng hay cácệ ữ ệ ử ụ ạ ẳ
đi m r i r c đ nh n bi t các v trí c a th gi i th c. ể ờ ạ ể ậ ế ị ủ ế ớ ự
Trong mô hình vector ng i ta tr u t ng hoá các s v t hi n t ng và g i chúng là cácườ ừ ượ ự ậ ệ ượ ọ
feature (nh ph n đĩnh nghĩa m c 2.1). Các feature đ c bi u di n b ng các đ i t ng hìnhư ầ ở ụ ượ ể ễ ằ ố ượ
h c: point, line, polygon. Các bi u di n này áp d ng cho nh ng đ i t ng đ n có hình d ngọ ể ễ ụ ữ ố ượ ơ ạ
và đ ng bao c th .ườ ụ ể
Trong cách bi u di n này, ng i ta đ nh nghĩa: ể ễ ườ ị
Feature là m t đ i t ng trên b n đ có hình d ng và v trí xác đ nh, có các thu c tính cùngộ ố ượ ả ồ ạ ị ị ộ
v i hành vi c th . ớ ụ ể
Feature Class là m t t p các feature có cùng ki u t c là t p các point, line, hay polygon. Cácộ ậ ể ứ ậ
feature class t ng đ ng v i m t l p trên b n đ .ươ ươ ớ ộ ớ ả ồ
Feature Dataset là t p các feature class hay t p h p các l p trên cùng m t h to đ . Featureậ ậ ợ ớ ộ ệ ạ ộ
dataset t ng đ ng v i m t b n đ .ươ ươ ớ ộ ả ồ
Các thành ph n d li uầ ữ ệ
Trong feature dataset, m i point đ c l u d i m t to đ đ n t ng ng, line đ c l uỗ ượ ư ướ ộ ạ ộ ơ ươ ứ ượ ư
d i m t chu i các đi m có to đ x, y cho tr c, polygon đ c l u thành m t t p các đi mướ ộ ỗ ể ạ ộ ướ ượ ư ộ ậ ể
có to đ x, y xác đ nh nh ng đo n th ng và đóng kín.ạ ộ ị ữ ạ ẳ
Points bi u di n các feature không có mi n bao hay đ dài, nhi u khi nó bi u di n các featureể ễ ề ộ ề ể ễ
có kích th c quá nh so v i t l c a b n đ .ướ ỏ ớ ỷ ệ ủ ả ồ
Lines dùng đ bi u di n các feature có chi u dài xác đ nh nh ng không có mi n bao hayể ể ễ ề ị ư ề
nh ng feature r t h p so v i t l b n đữ ấ ẹ ớ ỷ ệ ả ồ
Polygons đ c dùng đ bi u di n các feature có mi n bao xác đ nh: ru ng đ t, ao, h hay cácượ ể ể ễ ề ị ộ ấ ồ
đ n v hành chính…ơ ị
Các phép toán phân tích không gian trên mô hình Vector
GIS cung c p r t nhi u phép toán phân tích không gian trên mô hình d li u vector. Các phépấ ấ ề ữ ệ
toán này d a trên c s so sánh lôgic t p các đ i t ng này v i t p đ i t ng khác. ự ơ ở ậ ố ượ ớ ậ ố ượ
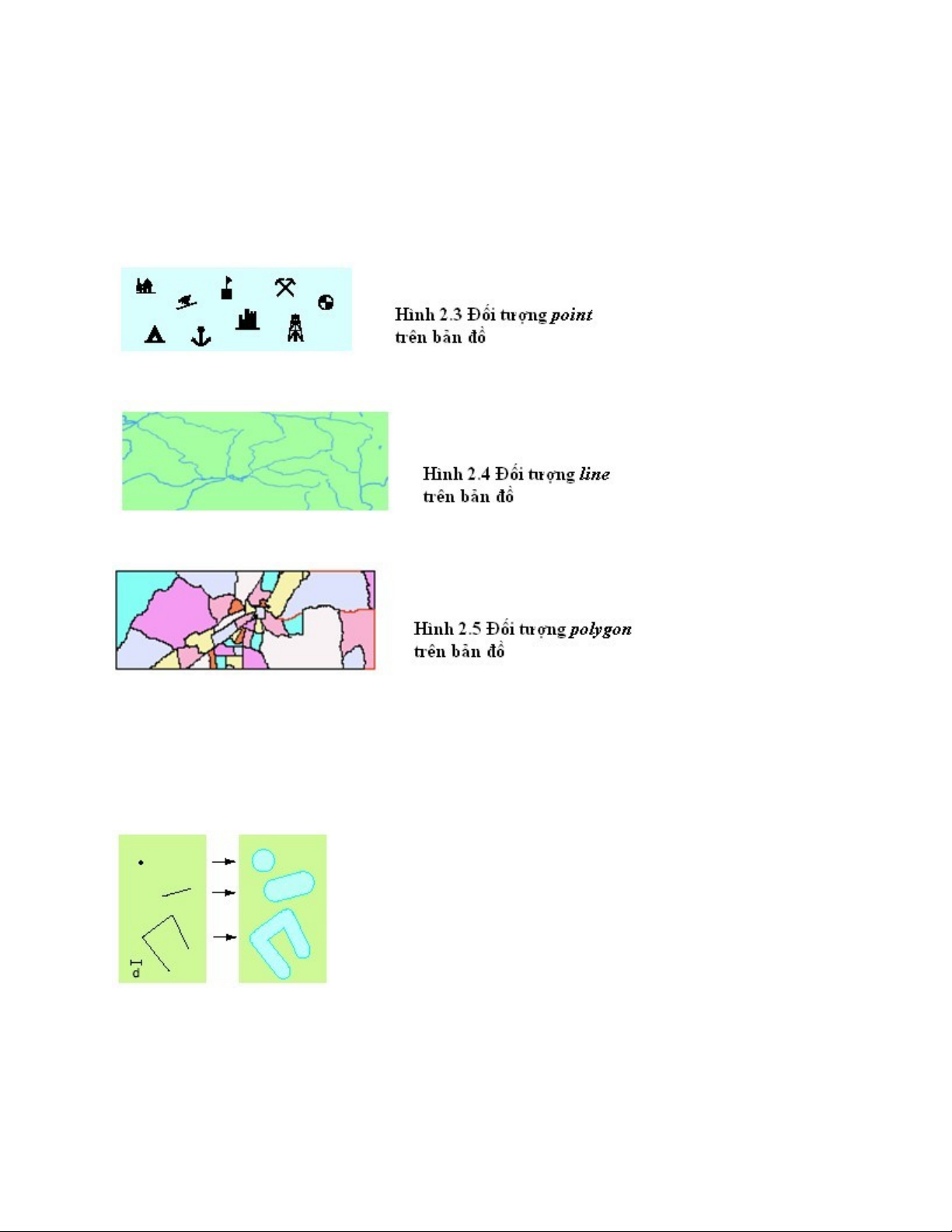
1.Buffer
Cho tr c m t đ i t ng và m t giá tr kho ng cách, phép toán buffer s t o ra m t vùngướ ộ ố ượ ộ ị ả ẽ ạ ộ
đ m là m t polygon bao ph xung quanh t t c các đi m mà kho ng cách t chúng đ n đ iệ ộ ủ ấ ả ể ả ừ ế ố
t ng nh h n ho c b ng kho ng cách đ ra.ượ ỏ ơ ặ ằ ả ề
2.Difference
Cho tr c hai đ i t ng giao nhau là đ i t ng c s và đ i t ng so sánh. Phép toánướ ố ượ ố ượ ơ ở ố ượ
difference s t o ra m t đ i t ng m i trong đó gi nguyên ph n c a đ i t ng c s khôngẽ ạ ộ ố ượ ớ ữ ầ ủ ố ượ ơ ở
n m trong đ i t ng so sánh.ằ ố ượ
3.Clip
Cho tr c m t đ i t ng và m t hình ch nh t. Phép toán clip s t o ra m t đ i t ng m iướ ộ ố ượ ộ ữ ậ ẽ ạ ộ ố ượ ớ
b ng cách c t đ i t ng đ u vào theo hình ch nhâtằ ắ ố ượ ầ ữ
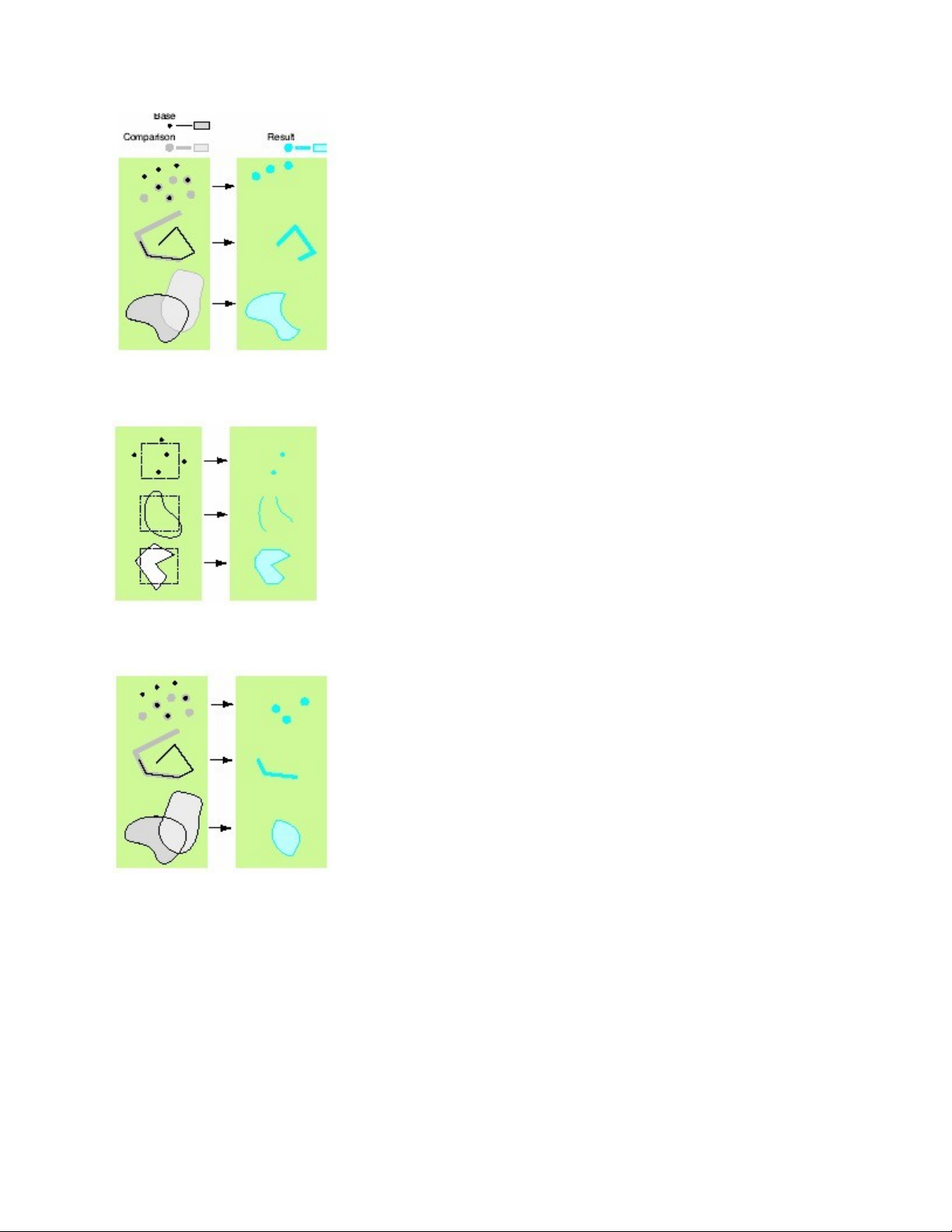
4.Intersect
Cho tr c hai đ i t ng. Phép toán intersect s t o ra m t đ i t ng m i chính là ph n giaoướ ố ượ ẽ ạ ộ ố ượ ớ ầ
gi a hai đ i t ng.ữ ố ượ
5.Convex hull
Cho tr c m t đ i t ng, phép toán convex hull s t o ra m t đ i t ng m i là m t polygonướ ộ ố ượ ẽ ạ ộ ố ượ ớ ộ
b ng cách n i t t c các đi m biên c a đ i t ng đó. Nói cách khác, đây là polygon nhằ ố ấ ả ể ở ủ ố ượ ỏ
nh t bao kín đ i t ng. ấ ố ượ
6.Symmetric difference
Phép toán symmetric difference s ti n hành so sánh v trí hai đ i t ng và t o ra m t đ iẽ ế ị ố ượ ạ ộ ố
t ng m i t hai đ i t ng ban đ u và b đi ph n giao gi a chúng.ượ ớ ừ ố ượ ầ ỏ ầ ữ
7.Cut
Cho m t đ ng cong và m t đ i t ng, phép toán cut s tách đ i t ng này thành hai ph nộ ườ ộ ố ượ ẽ ố ượ ầ
n a ph i và n a trái theo h ng c a đ ng cong.ử ả ử ướ ủ ườ
Point và multipoint không đ c áp d ng. Line và polygon ph i c t đ ng cong.ượ ụ ả ắ ườ
8.Union
Phép toán này ti n hành so sánh v trí t ng đ i c a hai đ i t ng và tr v m t đ i t ngế ị ươ ố ủ ố ượ ả ề ộ ố ượ
trên c s h p hai đ i t ng ban đ u. ơ ở ợ ố ượ ầ
Mô hình d li u vector cho ta nhi u thao tác h n trên các đ i t ng so v i mô hình raster.ữ ệ ề ơ ố ượ ớ

Vi c tính di n tích, đo kho ng cách c a các đ i t ng đ c th c hi n b ng các tính toán hìnhệ ệ ả ủ ố ượ ượ ự ệ ằ
h c t to đ c a các đ i t ng thay vì vi c tính toán trên các đi m nh c a mô hình raster.ọ ừ ạ ộ ủ ố ượ ệ ể ả ủ
Các thao tác trong mô hình này nói chung th ng chính xác h n. Thí d , tính di n tích, chu viườ ơ ụ ệ
c a m t vùng nào đó trên c s đa giác s chính xác h n vi c đ m các đi m nh trên b n đủ ộ ơ ở ẽ ơ ệ ế ể ả ả ồ
có các phép chi u khác nhau. M t s thao tác mô hình này cũng th c hi n nhanh h n nhế ộ ố ở ự ệ ơ ư
tìm đ ng đi trong m ng l i giao thông d a trên lý thuy t đ th . Tuy nhiên, m t s thaoườ ạ ướ ự ế ồ ị ở ộ ố
tác khác thì mô hình này s ch m h n so v i mô hình raster, ch ng h n khi th c hi n n pẽ ậ ơ ớ ẳ ạ ự ệ ạ
ch ng các l p c a b n đ , các thao tác vùng đ m.ồ ớ ủ ả ồ ệ
Mô hình d li u vector hình thành trên c s quan sát đ i t ng c a th gi i th c. Quan sátữ ệ ơ ở ố ượ ủ ế ớ ự
các đ c tr ng theo h ng đ i t ng là ph ng pháp t ch c thông tin trong các h GIS đặ ư ướ ố ượ ươ ổ ứ ệ ể
đ nh h ng các h th ng qu n tr CSDL. Chúng t i u trong vi c l u tr s li u b n đ vìị ướ ệ ố ả ị ố ư ệ ư ữ ố ệ ả ồ
ch c n l u các đ ng biên c a các đ c tr ng mà không c n ph i l u toàn b vùng c aỉ ầ ư ườ ủ ặ ư ầ ả ư ộ ủ
chúng. Do các thành ph n đ ho bi u di n các đ c tr ng c a b n đ liên k t tr c ti p v iầ ồ ạ ể ễ ặ ư ủ ả ồ ế ự ế ớ
các thu c tính c a CSDL nên ng i dùng d dàng tìm ki m và hi n th các thông tin t CSDL.ộ ủ ườ ễ ế ể ị ừ
2. Mô hình d li u rasterữ ệ
Mô hình raster bi u di n các đ c tr ng đ a lý b ng các đi m nh (pixel). D li u raster g nể ễ ặ ư ị ằ ể ả ữ ệ ắ
li n v i d li u d ng nh ho c d li u có tính liên t c cao. D li u raster có th bi u di nề ớ ữ ệ ạ ả ặ ữ ệ ụ ữ ệ ể ể ễ
đ c r t nhi u các đ i t ng t hình nh b m t đ t đ n nh ch p t v tinh, nh quét vàượ ấ ề ố ượ ừ ả ề ặ ấ ế ả ụ ừ ệ ả
nh ch p. Đ nh d ng d li u raster r t đ n gi n nh ng h tr r t nhi u ki u d li u khácả ụ ị ạ ữ ệ ấ ơ ả ư ỗ ợ ấ ề ể ữ ệ
nhau.
Ngu n d li u rasterồ ữ ệ
nh ch p t v tinh, nh ch p t máy bay, nh quét, nh ch p. Trong đó nh ch p t v tinhẢ ụ ừ ệ ả ụ ừ ả ả ụ ả ụ ừ ệ
là cách l y d li u t n kém nh t nh ng l i có ý nghĩa to l n trong vi c nghiên c u tình hìnhấ ữ ệ ố ấ ư ạ ớ ệ ứ
bi n đ i c a các s v t trên trái đ t theo th i gian. nh ch p t máy bay giúp ta v b n đế ổ ủ ự ậ ấ ờ Ả ụ ừ ẽ ả ồ
m t cách chi ti t. ộ ế
Ngoài ra ta còn raster còn có th đ c t o ra b ng cách chuy n đ i t nhi u ngu n d li uể ượ ạ ằ ể ổ ừ ề ồ ữ ệ
khác nh vector hay TIN. ư