
Các yêu cầu của điều khiển chuyển
động
Động cơ thông dụng nhất trong môi trường công nghiệp và môi trường nhúng là động cơ
bước, động cơ chổi than và động cơ DC không chổi than, tuy nhiên còn có nhiều lựa chọn
khác. Mỗi động cơ đòi hỏi các tín hiệu đầu vào riêng giúp làm quay động cơ và chuyển
điện năng thành cơ năng.
Xét ở nghĩa rộng nhất, điều khiển chuyển động giúp bạn sử dụng động cơ nhằm đáp ứng
tốt nhất các yêu cầu ứng dụng của bạn mà không cần phải giải quyết tất cả các vấn đề
truyền tín hiệu cấp thấp cần thiết để làm quay động cơ.
Hình 1. Bộ điều khiển chuyển động là trung tâm của hệ thống điều
khiển chuyển động.
Ngoài ra, điều khiển chuyển động tạo ra các chức năng cấp cao, do đó bạn có thể thực
hiện các ứng dụng tùy chỉnh một cách có hiệu quả dựa trên việc xây dựng các khối để tạo
ra các giải pháp thực hiện các tác vụ thông thường như định vị chính xác, đồng bộ hóa
nhiều trục, chuyển động với tốc độ, gia tốc và hãm tốc độ xác định.
Do hầu hết động cơ được vận hành trong hoàn cảnh tạm thời, các công cụ điều khiển

chuyển động cần thiết để thích ứng với tải khác nhau và điều kiện thay đổi, đòi hỏi thuật
toán điều khiển xử lí phức tạp và phản hồi thông tin từ hệ thống cơ khí. Cuối cùng nhưng
không kém phần quan trọng, các tác vụ chuyển động thường có ý nghĩa đặc biệt và
thường sử dụng máy móc có thể gây hại cho con người xung quanh. Do vậy, các chức
năng an ninh như công tắc giới hạn và các kênh I/O được sử dụng để thu thập thông tin
trạng thái đồng thời thực hiện các thủ tục đóng cắt.
Các thành phần hệ thống điều khiển chuyển động
Sơ đồ trên hình 1 minh họa các thành phần thiết yếu của một hệ thống điều khiển chuyển
động.
Đặc trưng đối với ứng dụng của bạn là phần mềm ứng dụng mà bạn phát triển. Phần mềm
ứng dụng bao gồm nhiều lớp tùy chọn. Thường thì có một ứng dụng giao diện người sử
dụng cung cấp khả năng tương tác người vận hành. Rất nhiều các ứng dụng chuyển động
có các lớp ứng dụng xử lí cảnh báo và kết nối cơ sở dữ liệu để nối với một hệ thống
SCADA. Chúng cũng có các hướng dẫn điều khiển chuyển động được thực hiện bởi bộ
điều khiển chuyển động. Nhà sản xuất bộ điều khiển chuyển động tạo ra môi trường phát
triển mà bạn sử dụng để phát triển phần mềm ứng dụng.
Với chỉ dẫn đã được nhắc đến ở trên, bộ điều khiển chuyển động tạo ra các
profile chuyển động. Dựa vào các profile này, bộ điều khiển gửi các tín hiệu (thường là
các tín hiệu ±10 V hoặc tín hiệu bước và tín hiệu định hướng) thông qua một bộ khuyếch
đại, hay một truyền động tới động cơ. Nhiệm vụ của bộ khuyếch đại là đưa tín hiệu từ bộ
điều khiển và biến đổi chúng thành tín hiệu làm cho động cơ chuyển động.
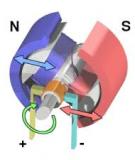
Khi động cơ chuyển động, thiết bị phản hồi – thường là một cảm biến vị trí – đưa thông
tin vị trí trở lại bộ điều khiển để đóng vòng lặp điều khiển. Từ cảm biến vị trí này, bộ
điều khiển chuyển động biết được vị trí của động cơ và có thể suy ra được vận tốc mà
động cơ đang chuyển động. Mặc dù các thiết bị phản hồi cung cấp phản hồi vị trí, đôi khi
là thông tin phản hồi đặc biệt như dữ liệu từ một cảm biến áp suất hay cảm biến đo độ
rung, cần được gửi trở lại bộ điều khiển.

Hình 2. Kiến trúc bộ điều khiển chuyển động
Kiến trúc bộ điều khiển chuyển động
Một bộ điều khiển chuyển động đóng vai trò như bộ não của hệ thống điều khiển chuyển
động và tính toán từng quỹ đạo chuyển động theo yêu cầu. Bộ điều khiển chuyển động
sử dụng các quỹ đạo mà nó tính toán để xác định lệnh momen xoắn thích hợp để gửi tới
bộ khuyếch đại động cơ đồng thời gây ra chuyển động. Bộ điều khiển cũng phải đóng
vòng lặp điều khiển và quản lí điều khiển giám sát bằng cách giám sát các giới hạn và
điểm dừng khẩn cấp nhằm đảm bảo hoạt động an toàn. Mỗi một hoạt động này cần phải
diễn ra thời gian thực nhằm đảm bảo độ tin cậy, chính xác, ổn định và an toàn cao ở mức
cần thiết để tạo ra một hệ thống điều khiển chuyển động có khả năng hoạt động.
Các nhiệm vụ khác nhau mà một bộ điều khiển chuyển động phải thực hiện, gồm:
Điều khiển giám sát – Cung cấp chuỗi lệnh và sự phối hợp cần thiết để thực hiện các hoạt
động cụ thể như sau:
- Khởi tạo hệ thống.
- Quản lí sự kiện
- Phát hiện lỗi.
Tạo quỹ đạo
Vòng lặp điều khiển























![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)