Ngườibáocáo:NguyễnChíLinhTàiliệu:TUT02.01
Ngày:9/8/2006Trang:1/10
Tutorialno02.01
Gửiđến:www.picvietnam.com
Nộidung:ChuẩngiaotiếpI2C–I2CtrongPIC
MICROSOFTWORD
Tómtắt:
GiớithiệuchungvềI2C
‐ ĐặcđiểmchungvềI2C:giaothức,địachỉ
‐ Cácchếđộhoạtđộng:master‐slave,multi‐master
ModuleI2CtrongViđiềukhiểnPIC
‐ Cấutrúcphầncứng
‐ Chếđộhoạtđộng:Master,Slave,Multi‐master
1. GiớithiệuchungvềI2C
Ngàynaytrongcáchệthốngđiệntửhiệnđại,rấtnhiềuICshaythiếtbịngoạivicần
phảigiaotiếpvớicácICshaythiếtbịkhác–giaotiếpvớithếgiớibênngoài.Vóimụctiêu
đạtđượchiệuquảchophầncứngtốtnhấtvớimạchđiệnđơngiản,Phillipsđãpháttriển
mộtchuẩngiaotiếpnốitiếp2dâyđượcgọilàI2C.I2ClàtênviếttắtcủacụmtừInter‐
IntergratedCircuit–BusgiaotiếpgiữacácICvớinhau.
LịchsửI2C–Thêmvàođây…(Phầnnàysẽthêmsau…)
I2CmặcdùđượcpháttriểnbớiPhilips,nhưngnóđãđượcrấtnhiềunhàsảnxuấtIC
trênthếgiớisửdụng.I2Ctrởthànhmộtchuẩncôngnghiệpchocácgiaotiếpđiềukhiển,có
thểkểrađâymộtvàitêntuổingoàiPhilipsnhư:TexasIntrument(TI),Maxim‐Dallas,
analogDevice,NationalSemiconductor…BusI2Cđượcsửdụnglàmbusgiaotiếpngoại
vichorấtnhiềuloạiICkhácnhaunhưcácloạiViđiềukhiển8051,PIC,AVR,ARM,chíp
nhớnhưRAMtĩnh(StaticRam),EEPROM,bộchuyểnđổitươngtựsố(ADC),sốtươngtụ
(DAC),ICđiểukhiểnLCD,LED…
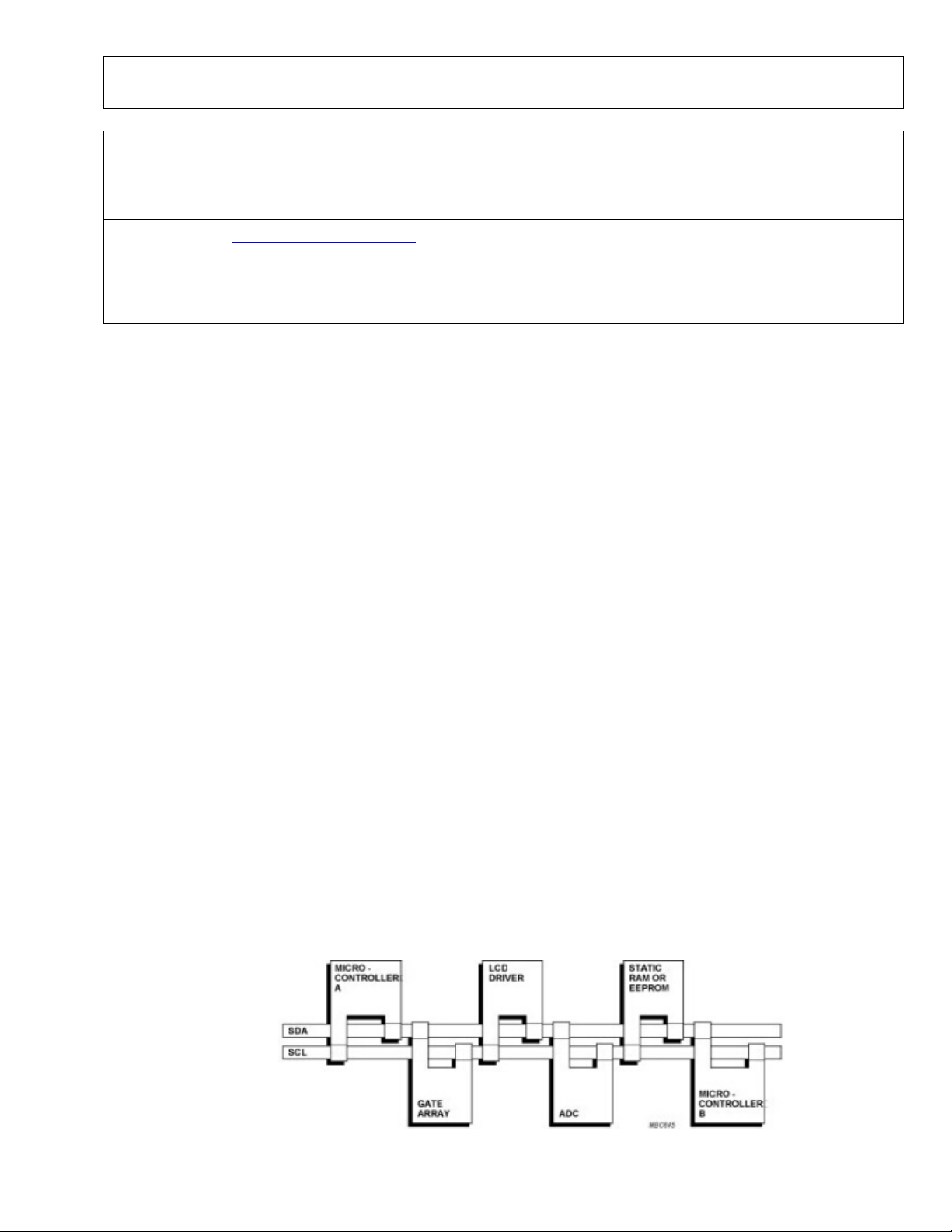
Hình1.1.BUSI2Cvàcácthiếtbịngoạivi
Ngườibáocáo:NguyễnChíLinhTàiliệu:TUT02.01
Ngày:9/8/2006Trang:2/10
1.1. ĐặcđiểmgiaotiếpI2C
MộtgiaotiếpI2Cgồmcó2dây:SerialData(SDA)vàSerialClock(SCL).SDAlàđường
truyềndữliệu2hướng,cònSCLlàđườngtruyềnxungđồnghồvàchỉtheomộthướng.
Nhưhìnhvẽtrên,khimộtthiếtbịngoạivikếtnốivàođườngI2CthìchânSDAcủanósẽ
nốivớidâySDAcủabus,chânSCLsẽnốivớidâySCL.
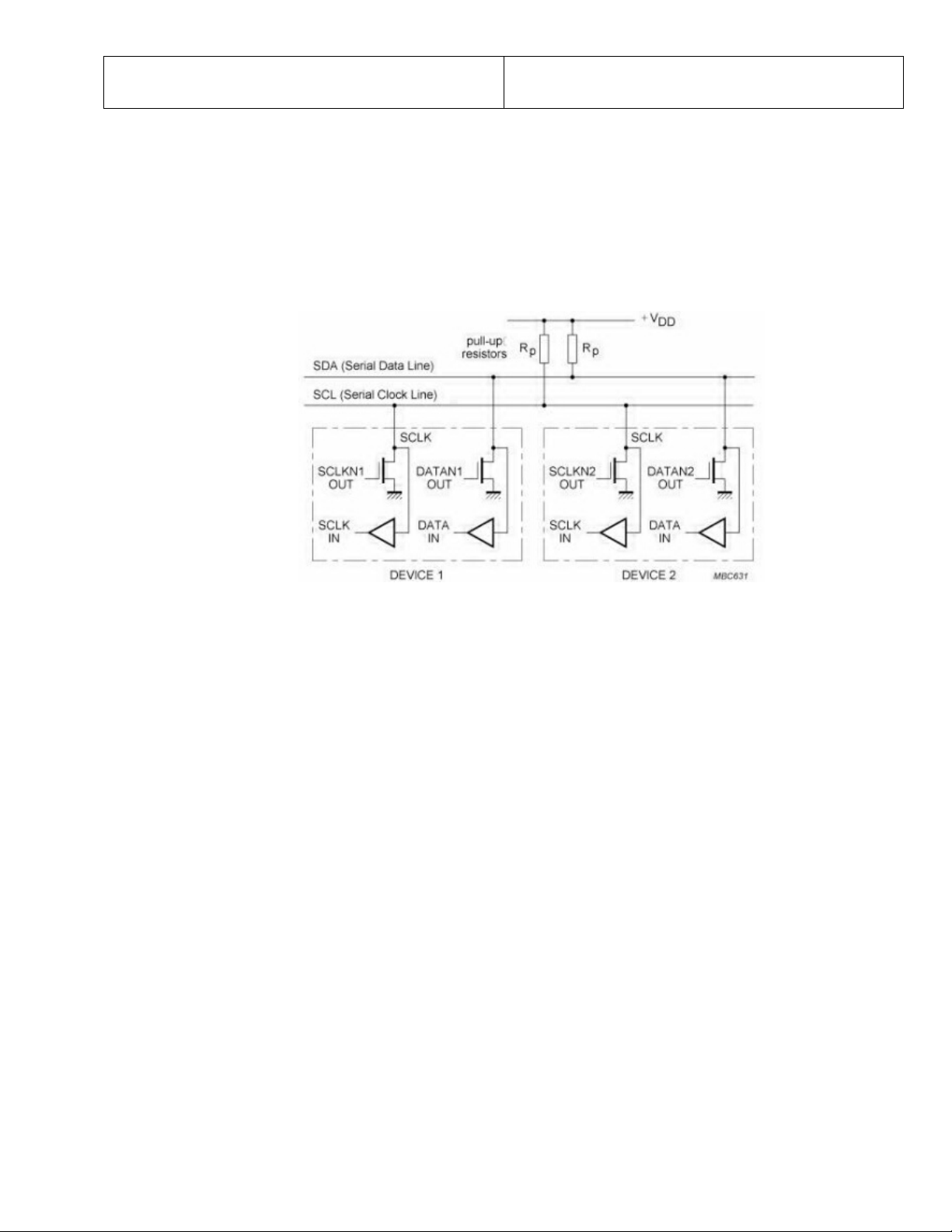
Hình1.2.KếtnốithiếtbịvàobusI2Cởchếđộchuẩn(Standardmode)
vàchếđộnhanh(Fastmode)
MỗidâySDAhaySCLđềuđượcnốivớiđiệnápdươngcủanguồncấpthôngquamột
điệntrởkéolên(pull‐upresistor).Sựcầnthiếtcủacácđiệntrởkéonàylàvìchângiaotiếp
I2Ccủacácthiếtbịngoạivithườnglàdạngcựcmánghở(open‐drainoropen‐collector).
Giátrịcủacácđiệntrởnàykhácnhautùyvàotừngthiếtbịvàchuẩngiaotiếp,thườngdao
độngtrongkhoảng1KΩđến4.7KΩ.
Trởlạivớihình1.1,tathấycórấtnhiềuthiếtbị(ICs)cùngđượckếtnốivàomộtbus
I2C,tuynhiênsẽkhôngxảyrachuyệnnhầmlẫngiữacácthiếtbị,bởimỗithiếtbịsẽđược
nhậnrabởimộtđịachỉduynhấtvớimộtquanhệchủ/tớtồntạitrongsuốtthờigiankết
nối.Mỗithiếtbịcóthểhoạtđôngnhưlàthiếtbịnhậndữliệuhaycóthểvừatruyềnvừa
nhận.Hoạtđộngtruyềnhaynhậncòntùythuộcvàoviệcthiếtbịđólàchủ(master)haytớ
(slave).
MộtthiếtbịhaymộtICkhikếtnốivớibusI2C,ngoàimộtđịachỉ(duynhất)đểphân
biệt,nócònđượccấuhìnhlàthiếtbịchủ(master)haytớ(slave).Tạisaolạicósựphânbiệt
này?ĐólàvìtrênmộtbusI2Cthìquyềnđiềukhiểnthuộcvềthiếtbịchủ(master).Thiếtbị
chủnắmvaitròtạoxungđồnghồchotoànhệthống,khigiữahaithiếtbịchủ/tớgiaotiếp
thìthiếtbịchủcónhiệmvụtạoxungđồnghồvàquảnlýđịachỉcủathiếtbịtớtrongsuốt
quátrìnhgiaotiếp.Thiếtbịchủgiữvaitròchủđộng,cònthiếtbịtớgiữvaitròbịđộng
trongviêcgiaotiếp.
Ngườibáocáo:NguyễnChíLinhTàiliệu:TUT02.01
Ngày:9/8/2006Trang:3/10
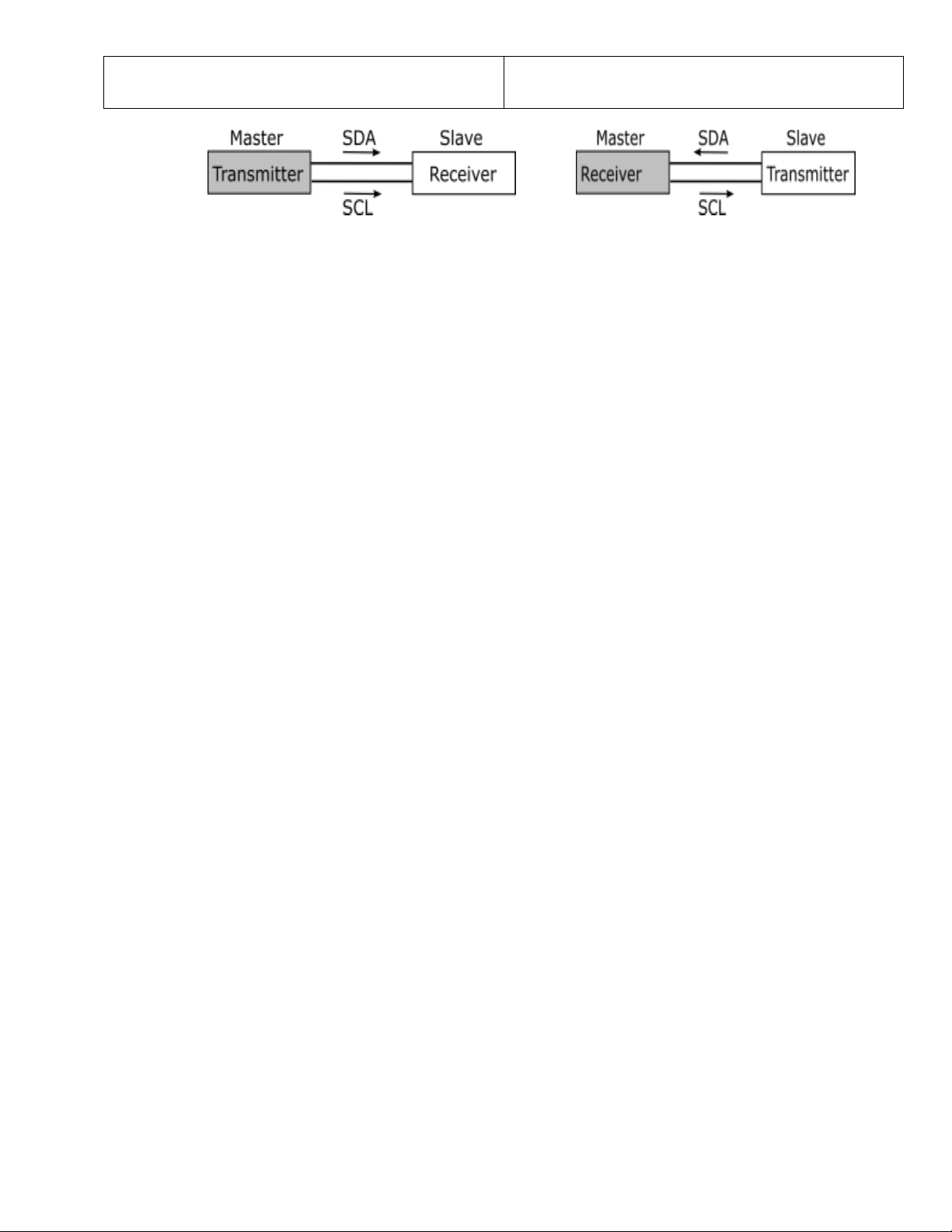
Hình1.3.Truyềnnhậndữliệugiữachủ/tớ
Nhìnhìnhtrêntathấyxungđồnghồchỉcómộthướngtừchủđếntớ,cònluồngdữliệu
cóthểđitheohaihướng,từchủđếntớhayngượclạitớđếnchủ.
VềdữliệutruyềntrênbusI2C,mộtbusI2Cchuẩntruyền8‐bitdữliệucóhướngtrên
đườngtruyềnvớitốcđộlà100Kbits/s–Chếđộchuẩn(Standardmode).Tốcđộtruyềncó
thểlêntới400Kbits/s–Chếđộnhanh(Fastmode)vàcaonhấtlà3,4Mbits/s–Chếđộcao
tốc(High‐speedmode).
MộtbusI2Ccóthểhoạtđộngởnhiềuchếđộkhácnhau:
- Mộtchủmộttớ(onemaster–oneslave)
- Mộtchủnhiềutớ(onemaster–multislave)
- Nhiềuchủnhiềutớ(Multimaster–multislave)
Dùởchếđộnào,mộtgiaotiếpI2Cđềudựavàoquanhệchủ/tớ.GiảthiếtmộtthiếtbịA
muốngửidữliệuđếnthiếtbịB,quátrìnhđượcthựchiệnnhưsau:
‐ ThiếtbịA(Chủ)xácđịnhđúngđịachỉcủathiếtbịB(tớ),cừngvớiviệcxácđịnh
địachỉ,thiếtbịAsẽquyếtđịnhviệcđọchayghivàothiếtbịtớ
‐ ThiếtbịAgửidữliệutớithiếtbịB
‐ ThiếtbịAkếtthúcquátrìnhtruyềndữliệu
KhiAmuốnnhậndữliệutừB,quátrìnhdiễnranhưtrên,chỉkháclàAsẽnhậndữliệu
từB.Tronggiaotiếpnày,AlàchủcònBvẫnlàtớ.Chitiếtviệcthiếtlậpmộtgiaotiếpgiữa
haithiếtbịsẽđượcmôtảchitiếttrongcácmụcdướiđây.
1.2. STARTandSTOPconditions
STARTvàSTOPlànhữngđiềukiệnbắtbuộcphảicókhimộtthiếtbịchủmuốnthiết
lậpgiaotiếpvớimộtthiếtbịnàođótrongmạngI2C.STARTlàđiềukiệnkhởiđầu,báo
hiệubắtđầucủagiaotiếp,cònSTOPbáohiệukếtthúcmộtgiaotiếp.Hìnhdướiđâymôtả
điềukiệnSTARTvàSTOP.
Banđầukhichưathựchiệnquátrìnhgiaotiếp,cảhaiđườngSDAvàSCLđềuởmức
cao(SDA=SCL=HIGH).LúcnàybusI2Cđượccoilàdỗi(“busfree”),sẵnsàngchomột
giaotiếp.HaiđiềukiệnSTARTvàSTOPlàkhôngthểthiếutrongviệcgiaotiếpgiữacác
thiếtbịI2Cvớinhau
Ngườibáocáo:NguyễnChíLinhTàiliệu:TUT02.01
Ngày:9/8/2006Trang:4/10
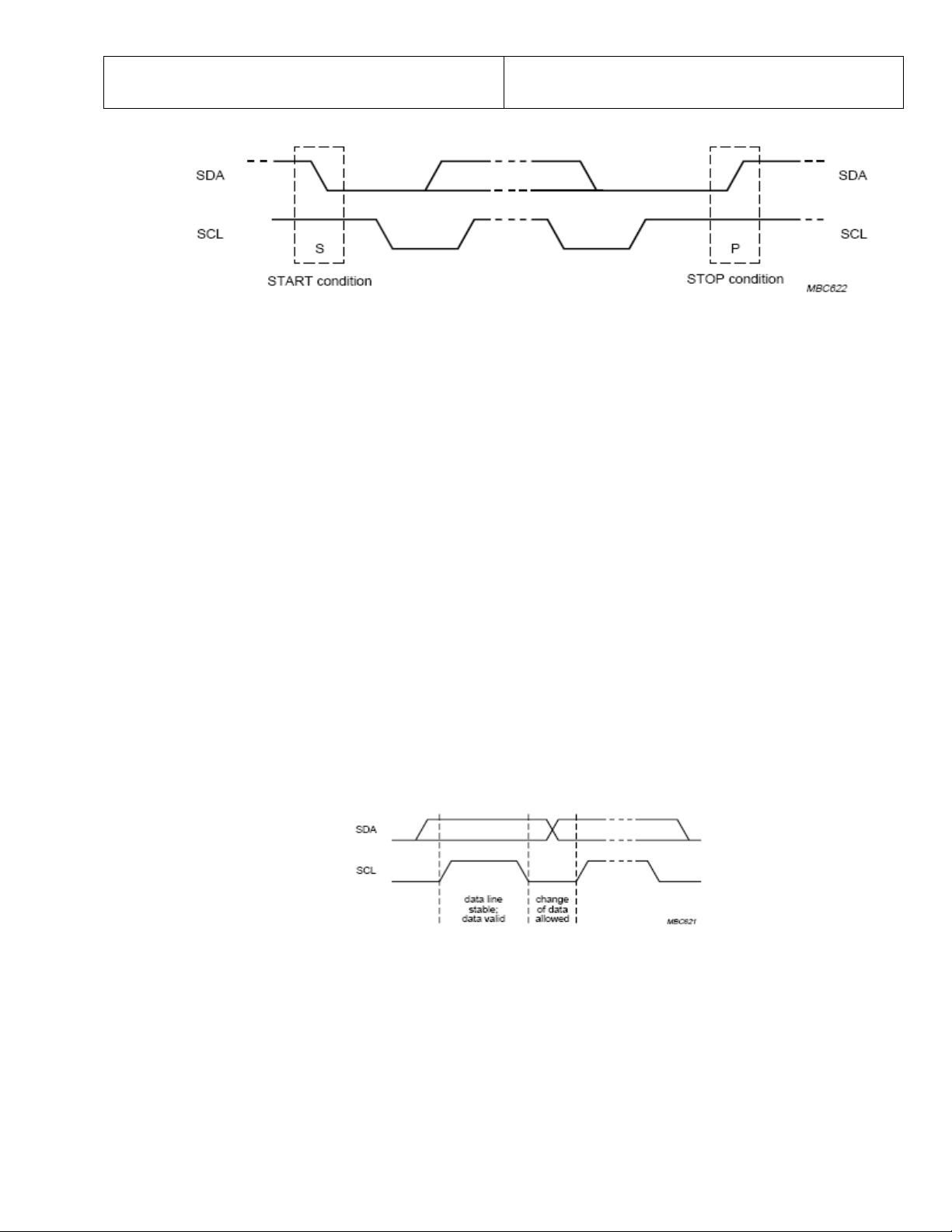
Hình1.4.ĐiềukiệnSTARTvàSTOPcủabusI2C
ĐiềukiệnSTART:mộtsựchuyểnđổitrạngtháitừcaoxuốngthấptrênđườngSDA
trongkhiđườngSCLđangởmứccao(cao=1;thấp=0)báohiệumộtđiềukiệnSTART
ĐiềukiệnSTOP:MộtsựchuyểnđổitrạngtháitừmứcthấplêncaotrênđườngSDA
trongkhiđườngSCLđangởmứccao.
CảhaiđiềukiệnSTARTvàSTOPđềuđượctạorabởithiếtbịchủ.SautínhiệuSTART,
busI2Ccoinhưđangtrongtrangtháilàmviệc(busy).BusI2Csẽrỗi,sẵnsàngchomột
giaotiếpmớisautínhiệuSTOPtừphíathiếtbịchủ.
SaukhicómộtđiềukiệnSTART,trongquatrìnhgiaotiếp,khicómộttínhiệuSTART
đượclặplạithayvìmộttínhiệuSTOPthìbusI2Cvẫntiếptụctrongtrạngtháibận.Tín
hiệuSTARTvàlặplạiSTARTđềucóchứcnănggiốngnhaulàkhởitạomộtgiaotiếp.
1.3. Địnhdạngdữliệutruyền
DữliệuđượctruyềntrênbusI2Ctheotừngbit,bitdữliệuđượctruyềnđitạimỗisườn
dươngcủaxungđồnghồtrêndâySCL,quátrìnhthayđổibitdữliệuxảyrakhiSCLđang
ởmứcthấp.
Hình1.5.Quátrìnhtruyền1bitdữliệu
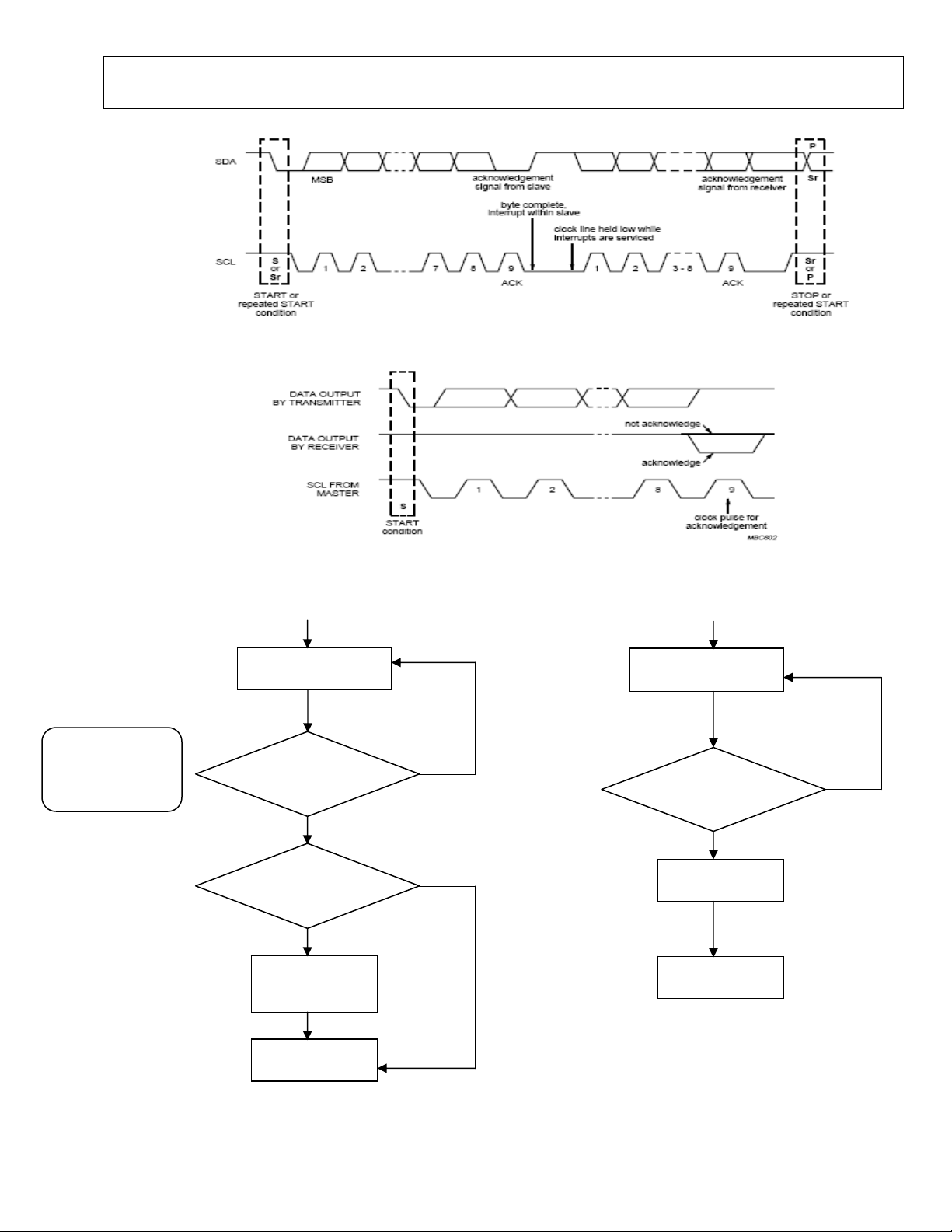
Mỗibytedữliệuđượctruyềncóđộdàilà8bits.Sốlượngbytecóthểtruyềntrongmột
lầnlàkhônghạnchế.MỗibyteđượctruyềnđitheosaulàmộtbitACKđểbáohiệuđã
nhậndữliệu.Bitcótrọngsốcaonhất(MSB)sẽđượctruyềnđiđầutiên,cácbítsẽđược
truyềnđilầnlượt.Sau8xungclocktrêndâySCL,8bitdữliệuđãđượctruyềnđi.Lúcnày
thiếtbịnhận,saukhiđãnhậnđủ8bítdữliệusẽkéoSDAxuốngmứcthấptạomộtxung
ACKứngvớixungclockthứ9trêndâySDAđểbáohiệuđãnhậnđủ8bit.Thiếtbịtruyền
khinhậnđượcbitACKsẽtiếptụcthựchiệnquátrìnhtruyềnhoặckếtthúc.
Ngườibáocáo:NguyễnChíLinhTàiliệu:TUT02.01
Ngày:9/8/2006Trang:5/10
Hình1.6.DữliệutruyềntrênbusI2C
Hình1.7.BitACKtrênbusI2C
TruyềnNhận
Hình1.8.Lưuđồthuậttoánquátrìnhtruyêngnhậndữliệu
Buffer=databit
BufferFull?
ReadBuffer
SendACK
NO
YES
SDA=data_bit
Clock=8?
ACK?
Next_byte
or STOP
STOP
NO
NO
YES
YES
Kiểmtraxem
đãtruyềnđủ
8
b
i
tch
ưa





![Các chip bổ trợ: [Thông tin chi tiết/Hướng dẫn chọn mua/Nơi bán]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20111130/monocin/135x160/cac_chip_bo_tro_119.jpg)

![Hệ thống đèn chạy ban ngày tốt nhất: [Hướng dẫn]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20111124/gauhaman123/135x160/dien_xe_36__8662.jpg)
![Tài liệu về 555: [Thêm từ mô tả nếu có thể, ví dụ: hướng dẫn, phân tích chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20111105/1231020082/135x160/555_la_mot_loai_linh_kien_kha_la_pho_bien_bay_gio_voi_viec_de_dang_tao_duoc_xung_vuong_va_co_the_thay_doi_tan_so_tuy_thich_3818.jpg)

















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)