Ngày nhận bài: 20-06-2024 / Ngày chấp nhận đăng bài: 06-09-2024 / Ngày đăng bài: 08-09-2024
*Tác giả liên hệ: Nguyễn Minh Nhựt. Khoa Răng Hàm Mặt, Đại học Y Dược Thành phố Hồ Chí Minh, Thành phố Hồ Chí Minh, Việt Nam.
E-mail: dr.nhutnguyenminh@gmail.com
© 2024 Bản quyền thuộc về Tạp chí Y học Thành phố Hồ Chí Minh.
https://www.tapchiyhoctphcm.vn 1
ISSN: 1859-1779
Nghiên cứu Y học
Tạp chí Y học Thành phố Hồ Chí Minh; 27(4):01-07
https://doi.org/10.32895/hcjm.m.2024.04.01
Đánh giá độ chính xác phẫu thuật đặt implant với
hệ thống hướng dẫn động - nghiên cứu in vitro
Nguyễn Minh Nhựt1,*, Đậu Cao Lượng1, Phạm Thị Hương Loan1, Võ Chí Hùng1,
Lê Đức Lánh2
1Khoa Răng Hàm Mặt, Đại học Y Dược Thành phố Hồ Chí Minh, Thành phố Hồ Chí Minh, Việt Nam
2Khoa Răng Hàm Mặt, Đại học Quốc tế Hồng Bàng, Thành phố Hồ Chí Minh, Việt Nam
Tóm tắt
Mục tiêu: Đánh giá độ chính xác của phẫu thuật đặt implant với hệ thống hướng dẫn động trong các trường hợp mất
răng từng phần.
Đối tượng và phương pháp nghiên cứu: Nghiên cứu in vitro trên 8 mẫu hàm. 40 implant được đặt với sự hướng dẫn của
hệ thống hướng dẫn động, đánh giá độ chính xác thông qua độ sai lệch về góc độ và khoảng cách giữa vị trí implant
thực tế so với kế hoạch.
Kết quả: Độ lệch góc trung bình là 1,18 ± 0,71 độ, độ lệch góc trung bình giữa hai implant được thiết kế song song là 0,71
± 0,33 độ. Về khoảng cách, độ lệch trung bình ở cổ và chóp implant lần lượt là 0,82 ± 0,19 mm; 0,89 ± 0,27 mm; độ lệch
trung bình theo chiều đứng ở cổ và chóp là 0,49 ± 0,27 mm. Không có sự khác biệt có ý nghĩa thống kê của hai nhóm
implant được đặt ở hàm trên và hàm dưới.
Kết luận: Phẫu thuật đặt implant trong trường hợp mất răng từng phần với hệ thống hướng dẫn động trên in vitro là chính
xác và trong giới hạn an toàn.
Từ khóa: độ chính xác; implant; hệ thống hướng dẫn động
Abstract
EVALUATE THE ACCURACY OF IMPLANT SURGERY USING DYNAMIC
NAVIGATION SYSTEM – IN VITRO STUDY
Nguyen Minh Nhut, Dau Cao Luong, Pham Thi Huong Loan, Vo Chi Hung, Le Duc Lanh
Objectives: The aim of the study is to evaluate the accuracy of implant placement surgery with dynamic navigation
system in cases of partial tooth loss.
Methods: in vitro study on 8 models. 40 replica implants were inserted using dynamic navigation system, the accuracy
of the guided surgery was evaluated by measuring the deviations in angle and distances between virtually planned and
Tạp chí Y học Thành phố Hồ Chí Minh * Tập 27 * Số 4 * 2024
2 | https://www.tapchiyhoctphcm.vn https://doi.org/10.32895/hcjm.m.2024.04.01
actual placed implant positions.
Results: The mean angle deviation were 1.18 ± 0.71 degrees, the mean angle deviation between the axis of the two
parallel implants were 0.71 ± 0.33 degrees. The mean deviation at the implant platform and apex were 0.82 ± 0.19 mm;
0.89 ± 0.27 mm, respectively; the mean vertical deviation at the implant platform and apex were 0.49 ± 0.27 mm. There
was no statistically significant difference regarding deviations between the two groups of implants placed in the upper
and lower jaws.
Conclusion: Implant placement surgery in partial edentulism with dynamic navigation system in vitro has accuracy and
within safety limits.
Keywords: accuracy; implant; dynamic navigation system
1. ĐẶT VẤN ĐỀ
Định hướng vị trí implant theo hướng dẫn của phục hình là
một yếu tố quyết định để đảm bảo thành công cả về chức năng
và thẩm mỹ của phục hình trên implant. Phẫu thuật implant
với sự hỗ trợ của máy tính đã và đang được sử dụng để đạt
được mục tiêu này. Hiện nay, có hai cách tiếp cận chính của
phẫu thuật implant có hướng dẫn: phẫu thuật hướng dẫn tĩnh
(Static guided surgery) và phẫu thuật hướng dẫn động
(Dynamic navigation guided surgery) [1].
Phẫu thuật hướng dẫn động (HDĐ) là phương pháp hiện
đại có nhiều ưu điểm trong việc hướng dẫn đặt implant, đặc
biệt là khả năng nhận diện liên tục phẫu trường trong tương
quan với vị trí mũi khoan theo thời gian thực trên màn hình
[2]. Đã có các nghiên cứu trên thế giới thực hiện để đánh giá
độ chính xác của hệ thống HDĐ ở các trường hợp mất răng
đơn lẻ trong in vitro. Tuy nhiên chưa có nhiều nghiên cứu
đánh giá độ chính xác khi đặt hai implant song song. Tại Việt
Nam hiện chưa có nghiên cứu đánh giá độ chính xác của phẫu
thuật đặt implant với hệ thống HDĐ.
Do đó, nghiên cứu này thực hiện để đánh giá độ chính xác
của phẫu thuật đặt implant với hệ thống HDĐ trên mẫu hàm
(in vitro) với các mục tiêu cụ thể như sau:
Đánh giá độ chính xác của phẫu thuật đặt implant với hệ
thống HDĐ.
So sánh độ chính xác của phẫu thuật đặt implant với hệ
thống HDĐ ở nhóm hàm trên và hàm dưới.
2. ĐỐI TƯỢNG – PHƯƠNG PHÁP
NGHIÊN CỨU
2.1. Vật liệu nghiên cứu
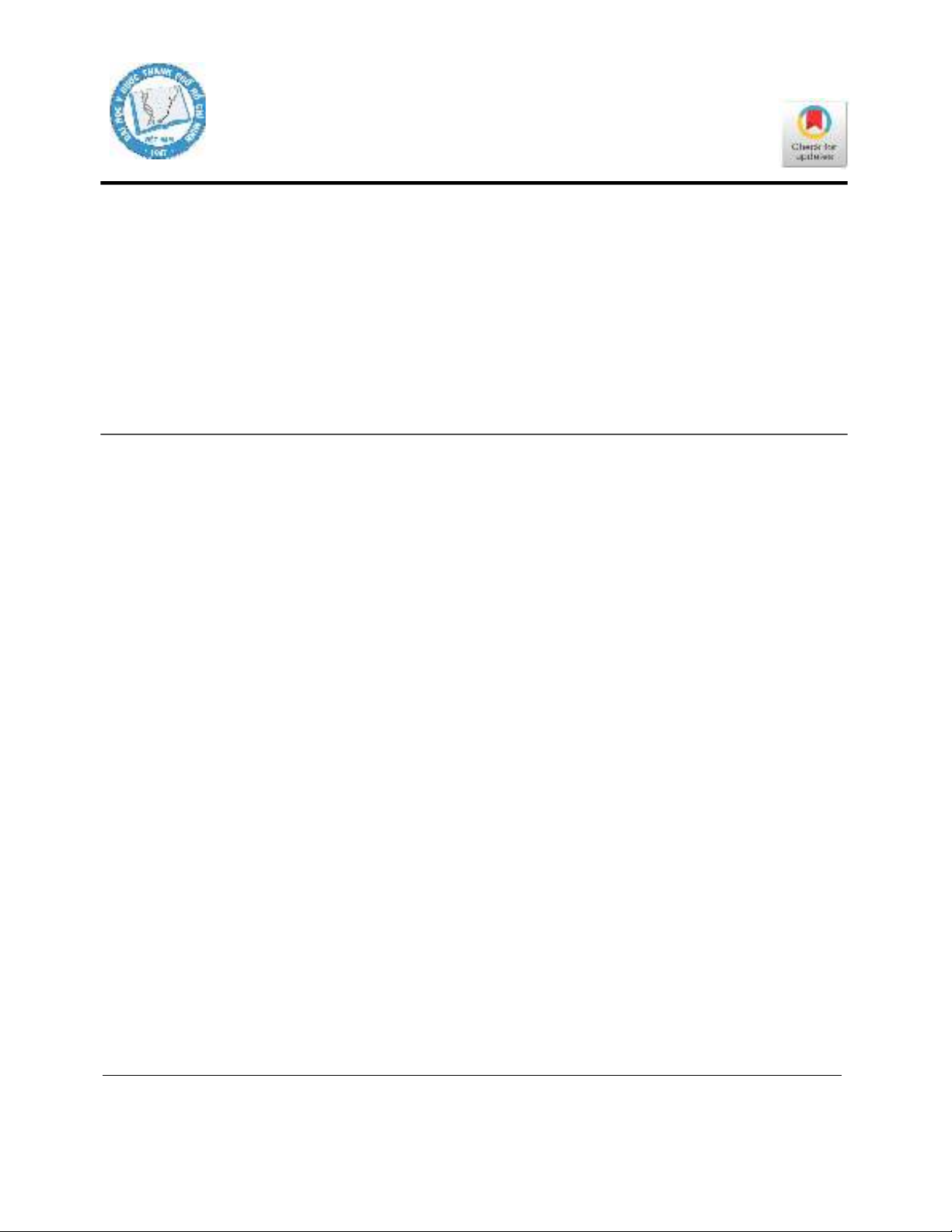
Mẫu hàm nhựa từ công ty Jining Xingxing Medical
Instrument (Trung Quốc) mô phỏng hàm trên và hàm dưới có
mật độ xương D3 theo phân loại của Misch (1985) (Hình 1A).
4 mẫu hàm trên có 5 vị trí để đặt implant tương ứng với các vị
trí răng 11, 13, 25, 26, 27.
4 mẫu hàm dưới có 5 vị trí để đặt implant tương ứng với các vị
trí răng 31, 33, 45, 46, 47.
A B
Hình 1. Thiết kế mẫu hàm (A) và cố định trên phantom (B)
Hệ thống phantom có khoá cố định mẫu hàm (Hình 1B).
Bản sao implant NobelActive, chiều dài 13 mm, đường
kính 4,3 mm.

Tạp chí Y học Thành phố Hồ Chí Minh * Tập 27 * Số 4 * 2024
https://doi.org/10.32895/hcjm.m.2024.04.01
https://www.tapchiyhoctphcm.vn | 3
2.2. Phương pháp nghiên cứu
2.2.1. Thiết kế nghiên cứu
Nghiên cứu in vitro, tại khoa Răng Hàm Mặt, Đại học Y
Dược Thành phố Hồ Chí Minh.
2.2.2. Quy trình thực hiện
2.2.2.1. Lên kế hoạch điều trị trên phần mềm
Quét mẫu hàm với máy quét mẫu hàm E1 (3Shape, Đan
Mạch) thu thập tập tin .STL.
Chụp phim với máy CBCT Orthophos SL 2D/3D
(Dentsply Sirona, Hoa Kỳ) thu tập tin .DICOM.
Nhập tập tin .STL và .DICOM vào phần mềm Implant
Studio (3Shape, Đan Mạch) để lên kế hoạch điều trị. Thiết kế
phục hình và implant ảo, trong đó các implant R11 và R13,
R25 và 27, R31 và 33, R45 và 47 được thiết kế song song theo
ba chiều. Sau đó xuất ra tập tin .XGXA.
Nhập tập tin .XGXA vào phần mềm X-Guide (X-Nav
Technologies, Hoa Kỳ) để tiến hành phẫu thuật.
Xuất dữ liệu kế hoạch có implant ảo trên phần mềm X-
Guide, xuất ra tập tin .STL có implant ảo.
2.2.2.2. Chuẩn bị phẫu thuật
Cố định mẫu hàm vào hệ thống đầu phantom.
Cố định bộ phận theo dõi bệnh nhân vào các răng trên hàm
làm việc và bộ phận theo dõi tay khoan.
Hiệu chỉnh dụng cụ, sử dụng X-Mark để hợp nhất mẫu hàm
và và phim CBCT (Cone beam computed tomography) trên
phần mềm.
Sửa soạn vị trí cấy implant theo trình tự mũi khoan và đặt
implant dưới sự hướng dẫn của hệ thống hướng dẫn động,
trong quá trình khoan theo dõi liên tục vị trí và góc độ của mũi
khoan.
Chụp CBCT mẫu hàm để thu nhận hình ảnh của vị trí
implant đã đặt.
Xác định vị trí implant thực tế trên hình ảnh CBCT và sử
dụng công cụ đánh giá kết quả điều trị của phần mềm
coDiagnostiX để đánh giá độ sai lệch vị trí implant.
Hình 2. Khoan và đặt implant với sự hướng dẫn của hệ thống HDĐ
Hình 3. Phần mềm coDiagnostiX đánh giá độ sai lệch vị trí implant
2.2.3. Biến số nghiên cứu
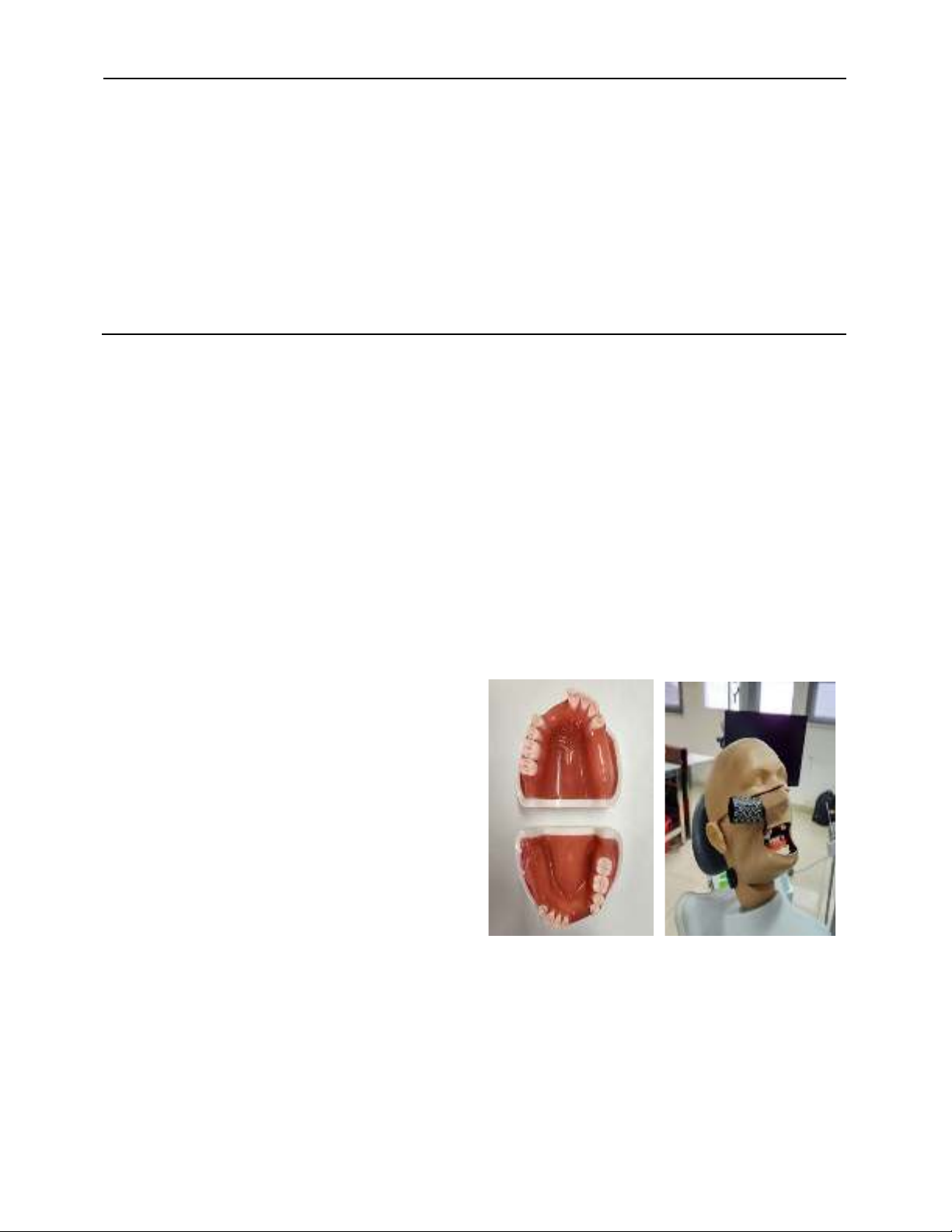
Đánh giá vị trí của implant thực tế so với implant kế hoạch
(Hình 4, 5).
Độ lệch góc (A): góc giữa trục implant kế hoạch và thực tế,
đơn vị độ.
Độ lệch ở cổ implant (Lp): khoảng cách tâm của cổ implant
kế hoạch và thực tế, đơn vị mm.
Độ lệch ở chóp implant (La): khoảng cách tâm của chóp
implant kế hoạch và thực tế, đơn vị mm.
Độ lệch theo chiều đứng ở cổ implant (Vp): là khoảng cách
giữa tâm của cổ implant kế hoạch đến hình chiếu của tâm của
cổ implant thực tế lên trục của implant kế hoạch, đơn vị mm.
Độ lệch theo chiều đứng ở chóp implant (Va): là khoảng cách
giữa tâm của chóp implant kế hoạch đến hình chiếu của tâm của
chóp implant thực tế lên trục của implant kế hoạch, đơn vị mm.
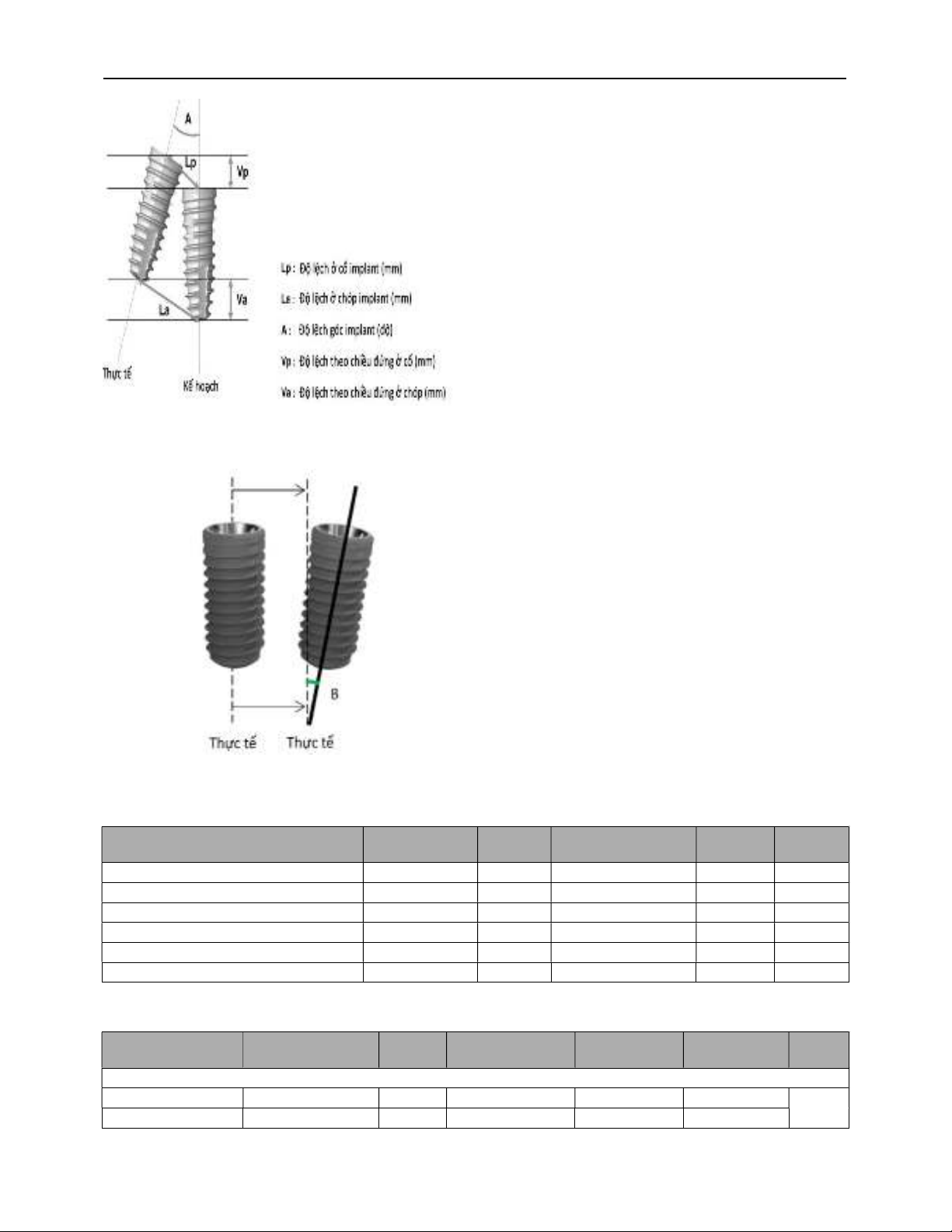
Độ lệch song song (B): độ lệch góc giữa hai implant được
thiết kế song song, đơn vị độ.
Tạp chí Y học Thành phố Hồ Chí Minh * Tập 27 * Số 4 * 2024
4 | https://www.tapchiyhoctphcm.vn https://doi.org/10.32895/hcjm.m.2024.04.01
Hình 4. Các thông số đo độ chính xác của vị trí implant thực tế
so với kế hoạch
Hình 5. Thông số độ lệch song song giữa hai implant
2.2.4. Phân tích và xử lý số liệu
Nhập dữ liệu thu thập bằng phần mềm Microsoft Excel 365,
xử lý số liệu bằng phần mềm SPSS 24. Phép kiểm Shapiro-
Wilk để kiểm tra phân phối bình thường của số liệu.
Kiểm định t độc lập: đánh giá sự khác biệt độ sai lệch về độ
lệch ở cổ và chóp, độ lệch theo chiều đứng ở cổ và ở chóp giữa
hai nhóm hàm trên/hàm dưới.
Kiểm định Mann Whitney: đánh giá sự khác biệt độ sai lệch
về độ lệch góc giữa hai nhóm hàm trên và hàm dưới.
3. KẾT QUẢ
Nghiên cứu đã tiến hành đặt 40 implant với hệ thống hướng
dẫn động trên 8 mẫu hàm, trong đó có 4 mẫu hàm trên và 4 mẫu
hàm dưới. Sự khác biệt về vị trí giữa implant thực tế so với kế
hoạch được thể hiện trong Bảng 1.
Kết quả Bảng 1 cho thấy: độ lệch góc trung bình là 1,18 ±
0,71 độ, độ lệch ở cổ trung bình là 0,82 ± 0,19mm, độ lệch ở
chóp trung bình là 0,89 ± 0,27mm, độ lệch trung bình theo
chiều đứng ở cổ và ở chóp là 0,49 ± 0,27mm. Đối với các cặp
implant được thiết kế song song, kết quả độ lệch song song là
0,71 ± 0,33 độ.
Khi đánh giá độ chính xác của implant được đặt với hệ
thống HDĐ trên hai hàm, nhóm implant được đặt ở hàm trên
có độ lệch nhiều hơn so với nhóm implant ở hàm dưới. Tuy
nhiên, sự khác biệt này không có ý nghĩa thống kê (p >0,05)
(Bảng 2).
Bảng 1. Độ sai lệch trung bình giữa implant thực tế và kế hoạch
Biến số Trung bình ±
độ lệch chuẩn Trung vị Khoảng tứ phân vị Giá trị
nhỏ nhất
Giá trị
lớn nhất
Độ lệch góc (độ) 1,18 ± 0,71 1,25 0,53 – 1,60 0,20 3,10
Độ lệch ở cổ (mm) 0,82 ± 0,19 0,81 0,71 – 0,95 0,37 1,23
Độ lệch theo chiều đứng ở cổ (mm) 0,49 ± 0,27 0,52 0,28 – 0,71 0,08 1,12
Độ lệch ở chóp (mm) 0,89 ± 0,27 0,95 0,70 – 1,11 0,34 1,38
Độ lệch theo chiều đứng ở chóp (mm) 0,49 ± 0,27 0,51 0,28 – 0,71 0,08 1,12
Độ lệch song song (độ) 0,71 ± 0,33 0,66 0,46 – 0,89 0,28 1,36
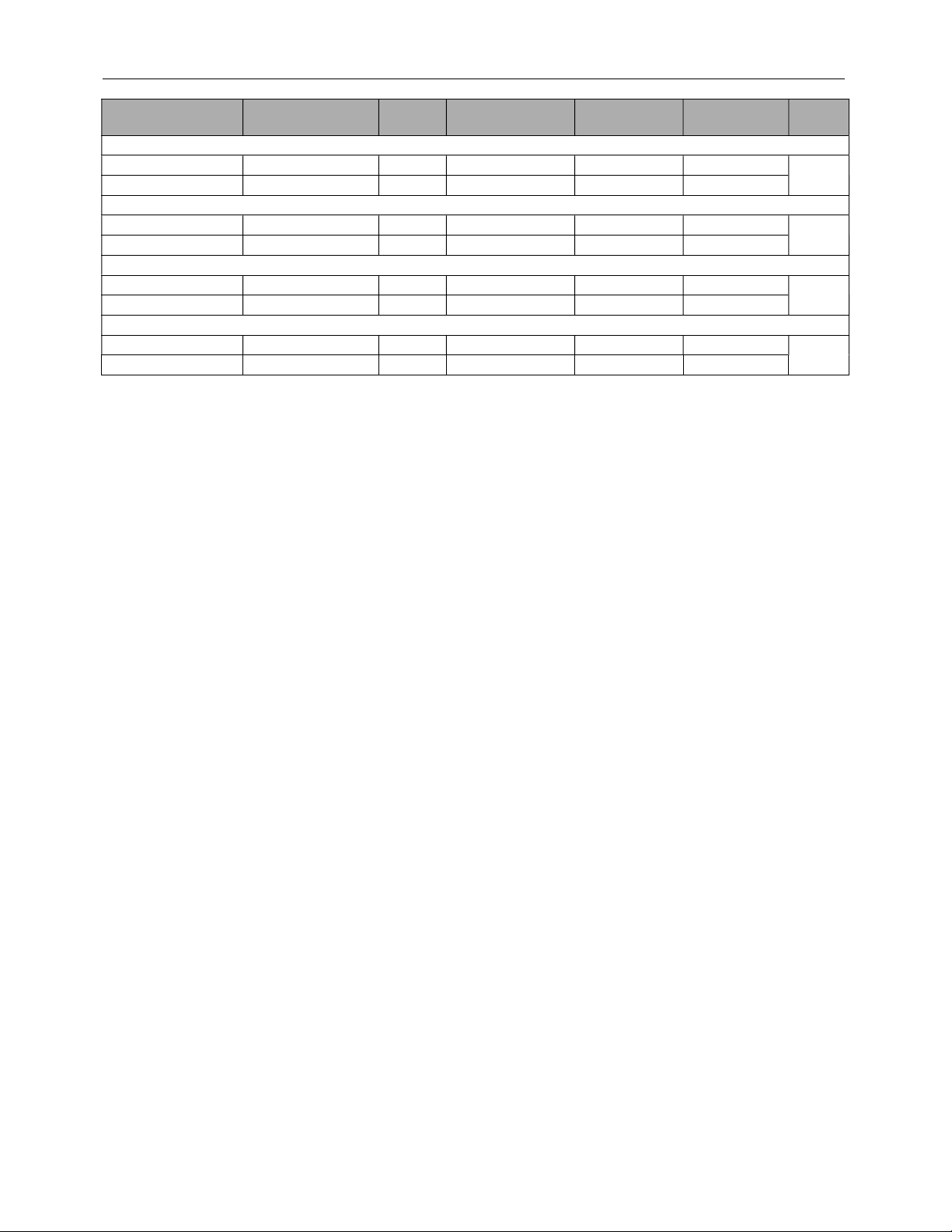
Bảng 2. So sánh độ sai lệch của implant thực tế và kế hoạch giữa nhóm implant đặt ở hàm trên (n=20) và nhóm implant đặt ở hàm
dưới (n=20)
Biến số Trung bình ± độ
lệch chuẩn
Trung
vị
Khoảng tứ phân
vị
Giá trị nhỏ
nhất
Giá trị lớn
nhất p
Độ lệch góc (độ)
Nhóm hàm trên 1,34 ± 0,74 1,30 0,83 – 1,68 0,20 3,10 0,193**
Nhóm hàm dưới 1,02 ± 0,65 0,80 0,40 – 1,58 0,30 2,50
Tạp chí Y học Thành phố Hồ Chí Minh * Tập 27 * Số 4 * 2024
https://doi.org/10.32895/hcjm.m.2024.04.01
https://www.tapchiyhoctphcm.vn | 5
Biến số Trung bình ± độ
lệch chuẩn
Trung
vị
Khoảng tứ phân
vị
Giá trị nhỏ
nhất
Giá trị lớn
nhất p
Độ lệch ở cổ (mm)
Nhóm hàm trên 0,86 ± 0,22 0,86 0,68 – 1,02 0,37 1,23 0,158*
Nhóm hàm dưới 0,78 ± 0,15 0,77 0,71 – 0,89 0,50 1,15
Độ lệch theo chiều đứng ở cổ (mm)
Nhóm hàm trên 0,55 ± 0,27 0,59 0,33 – 0,76 0,10 1,12 0,160*
Nhóm hàm dưới 0,43 ± 0,26 0,39 0,21 – 0,70 0,08 0,86
Độ lệch ở chóp (mm)
Nhóm hàm trên 0,91 ± 0,30 1,00 0,62 – 1,13 0,34 1,38 0,738*
Nhóm hàm dưới 0,88 ± 0,24 0,88 0,70 – 1,08 0,47 1,29
Độ lệch theo chiều đứng ở chóp (mm)
Nhóm hàm trên 0,56 ± 0,27 0,59 0,36 – 0,76 0,10 1,12 0,144*
Nhóm hàm dưới 0,43 ± 0,26 0,39 0,21 – 0,69 0,08 0,86
4. BÀN LUẬN
Yimarj P (2020) cho rằng độ chính xác của phẫu thuật đặt
implant với HDĐ phụ thuộc vào hai yếu tố [3]. Một là sự
chính xác trong quá trình chập dữ liệu hợp nhất mẫu hàm và
phim CBCT trên phần mềm. Hai là sự chính xác khi khoan và
đặt implant, phụ thuộc vào đường cong học tập của bác sĩ khi
thực hiện với hướng dẫn của hệ thống HDĐ, phẫu thuật viên
phải luyện tập để có thể thực hiện khoan, đặt implant chính
xác. Tuy nhiên, độ chính xác của phẫu thuật đặt implant với
hệ thống HDĐ không phụ thuộc vào kinh nghiệm của bác sĩ.
Nghiên cứu của Wu D (2020) và Wang X (2022) cho thấy sau
khi được huấn luyện [4, 5], các phẫu thuật viên nhiều kinh
nghiệm và ít kinh nghiệm có thể đặt implant chính xác tương
đương với hướng dẫn của hệ thống HDĐ.
Kết quả các nghiên cứu in vitro trên thế giới đánh giá độ
chính xác của hệ thống HDĐ được trình bày ở Bảng 3. Các
độ lệch trong nghiên cứu này cao hơn so với nghiên cứu của
Emery RW (2016) [2]. Tuy nhiên, độ lệch trong nghiên cứu
này thấp hơn với các nghiên cứu còn lại. Wang X (2022) đã
đánh giá độ chính xác trên hệ thống
X-Guide [5]. Trong đó độ lệch ở cổ được đánh giá theo hai
chiều (nhỏ hơn so với độ lệch theo ba chiều), tuy nhiên các độ
lệch trong nghiên cứu này thấp hơn nghiên cứu của Wang X
ở cả hai nhóm bác sĩ nhiều và ít kinh nghiệm.
Theo chiều đứng, độ lệch ở cổ và chóp là 0,49 ± 0,27 độ.
Có thể giải thích rằng do trong nghiên cứu này có độ lệch góc
nhỏ nên độ lệch theo chiều đứng ở cổ và ở chóp gần như
tương đương nhau. Y văn cũng ghi nhận độ lệch theo chiều
đứng ở vị trí cổ implant trong khoảng từ 0,26 – 0,75 mm [2,6],
độ lệch theo chiều đứng ở vị trí chóp implant trong khoảng từ
0,25 – 0,88 mm [1, 2, 5, 6]. Kết quả độ lệch theo chiều đứng
ở cổ và chóp implant trong nghiên cứu này cũng phù hợp với
y văn nói trên. Trong số 40 implant đã được đặt ở nghiên cứu
này, độ lệch khoảng cách lớn nhất là 1,38 mm (Bảng 1). Điều
này cho thấy đặt implant in vitro với hệ thống HDĐ đảm bảo
khoảng an toàn 2 mm và có độ chính xác cao.
Khi đặt hai hay nhiều implant kế cận, nếu có thể, các
implant nên được thiết kế song song nhau trong không gian 3
chiều. Sự song song này giúp cho phục hình có cùng hướng
lắp trên hai implant, do đó bác sĩ có thể dễ dàng thực hiện
phục hình bắt vít và cho phép lực ăn nhai truyền theo trục của
implant. Trong nghiên cứu in vitro này, các implant trong
cùng phần hàm được thiết kế song song nhau. Kết quả nghiên
cứu cho thấy độ lệch góc của hai implant song song của hai
implant là 0,71 ± 0,33 độ. Kết quả này tốt hơn với độ lệch
song song (3,55 ± 2,29 độ) trong nghiên của của Yimarj P
(2020) [3]. Sự khác biệt này có thể do nghiên cứu của Yimarj
P được thực hiện trên lâm sàng và sử dụng hệ thống HDĐ
khác với nghiên cứu này.
Khi thực hiện phẫu thuật cấy ghép nha khoa, thông thường
phẫu thuật viên thao tác ở hàm dưới dễ hơn so với hàm trên.
Tuy nhiên, việc sử dụng hệ thống HDĐ sẽ giúp bác sĩ có khả
năng khoan và đặt implant chính xác ở cả hàm trên và hàm
dưới. Kết quả nghiên cứu này cho thấy khi đặt implant với hệ
thống hướng dẫn động (Bảng 2), nhóm implant được đặt ở
hàm trên có độ lệch nhiều hơn so với nhóm implant ở hàm
dưới. Tuy nhiên, sự khác biệt giữa hai nhóm này không có ý
nghĩa thống kê ở tất cả các biến số độ lệch về góc và khoảng
cách (p >0,05).

























