L I M ĐÂUƠ Ơ
Ngày nay, đi n t công su t đã và đang đóng 1 vai trò r t quan tr ngệ ử ấ ấ ọ
trong quá trình công nghi p hoá đ t n c. S ng d ng c a đi n t công su tệ ấ ướ ự ứ ụ ủ ệ ử ấ
trong các h th ng truy n đ ng đi n là r t l n b i s nh g n c a các ph n tệ ố ề ộ ệ ấ ớ ở ự ỏ ọ ủ ầ ử
bán d n và vi c d dàng t đ ng hoá cho các quá trình s n xu t. Các h th ngẫ ệ ễ ự ộ ả ấ ệ ố
truy n đ ng đi u khi n b i đi n t công su t đem l i hi u su t cao. Kíchề ộ ề ể ở ệ ử ấ ạ ệ ấ
th c, di n tích l p đ t gi m đi r t nhi u so v i các h truy n đ ng thôngướ ệ ắ ặ ả ấ ề ớ ệ ề ộ
th ng nh : Khu ch đ i t , máy phát - đ ng c ...ườ ư ế ạ ừ ộ ơ
Xu t phát t yêu c u th c t đó, trong n i dung môn h c Đi n t côngấ ừ ầ ự ế ộ ọ ệ ử
su t chúng em đã đ c giao th c hi n đ tài:ấ ượ ự ệ ề Thi t k m ch băm xung ế ế ạ môt
chiêu co đao chiêu đê điêu chinh đông c môt chiêu kich t đôc lâp ơ ư .
V i s h ng d n t n tình c a th y giáo: ớ ự ướ ẫ ậ ủ ầ Nguyên Thi Minh Tâm
chúng em đã ti n hành nghiên c u,thi t k đ tài và hoàn thành đúng th i h nế ứ ế ế ề ờ ạ
đ c giao.ượ
Trong quá trình th c hi n đ tài do kh năng và ki n th c th c t cóự ệ ề ả ế ứ ự ế
h n chạê nên không th tránh kh i sai sót kính mong th y cô, và các b n đóng gópể ỏ ầ ạ
ý ki n đ đ tài c a chúng em đ c hoàn thi n h n.ế ể ề ủ ượ ệ ơ
Chúng em xin chân thành c m nả ơ
Ch ng I: Tông quan vê đông c điên môt chiêu kich t đôc lâpươ ơ ư
1.1 Thi tr ng đông c điên môt chiêu ươ ơ
GVHD: Nguyên Thi Minh Tâm 1
SVTH: Nguyên Đinh Thinh !
Nguyên Văn Thông

Cung v i s phat triên! ơ ư " phat ngay cang manh me cua cac nganh công nghiêp ca ! ! " ! "
vê chiêu rông lân chiêu sâu, điên va cac may điên đong vai tro rât quan trong,! ! ! ! !
không thê thiêu đ c trong phân l n cac nganh công nghiêp va đ i sông sinh" ươ ! ơ ! ! ơ!
hoat con ng i. No luôn đi tr c môt b c lam tiên đê nh ng cung la mui ươ! ươ ươ ! ! ! ư !
nhon quyêt đinh s thanh công cua ca môt hê thông san xuât công nghiêp. ư ! " " "
Không môt quôc gia nao, môt nên san xuât nao không s dung điên va may ! " ! ư" !
điên.
Do tinh u viêt cua hê thông diên xoay chiêu: dê san xuât, dê truyên tai..., ca ư " ! " ! " "
may phat va đông c điên xoay chiêuco câu tao đ n gian va công suât l n, dê ! ơ ! ơ " ! ơ
vân hanh... ma may điên( đông c điên) xoay chiêu ngay cang đ c s dung ! ! ơ ! ! ! ươ ư"
rông rai va phô biên. Tuy nhiên đông c điên môt chiêu vân gi môt vi tri nhât ! " ơ ! ư
đinh nh : trong công nghiêp giao thông vân tai, va nôi chung cac thiêt bi cân ư " ! ơ" !
điêu khiên tôc đô quay liên tuc trong pham vi rông(nh trong can thep,may! " ư
công cu l n, đâu may điên...) Măc du so v i đông c không đông bô đê chê tao ơ ! ! ơ ơ ! "
đông c điên môt chiêu cung c thi ga thanh đăt h n do s dung kim loai nhiêu ơ ! ! ơ ! ! ơ ư !
h n, chê tao bao quan cô gop h c tap h n... nh ng do đo nhuwngx u điên cuaơ " " " ư ơ ư ư " "
no ma may điên môt chiêu vân không thê thiêu trong nên san xuât hiên đai. ! ! " ! "
1.2 Đông c điên môt chiêu kich t đôc lâp va cac ph ng phap điêu khiên ơ ư ươ
đao chiêu đông c ơ
1.2.1 Đông c điên môt chiêu kich t đôc lâp ơ ư
Đ ng c đi n m t chi u g m có 2 ph n : Ph n tĩnh (stator) và ph n đ ngộ ơ ệ ộ ề ồ ầ ầ ầ ộ
(rôtor)
1.2.1.1 Ph n tĩnh (stator)ầ
G m các ph n chính sau:ồ ầ
a. C c t chính:ự ừ
GVHD: Nguyên Thi Minh Tâm 2
SVTH: Nguyên Đinh Thinh !
Nguyên Văn Thông

C c t chính là b ph n sinh ra t tr ng g m có lõi s t c c t và dâyự ừ ộ ậ ừ ườ ồ ắ ự ừ
qu n kích t l ng ngoài lõi s t c c t . Lõi s t c c t làm b ng nh ng lá thép kấ ừ ồ ắ ự ừ ắ ự ừ ằ ữ ỹ
thu t đi n. C c t đ c g n ch t vào v nh các bulông. Dây qu n kích tậ ệ ự ừ ượ ắ ặ ỏ ờ ấ ừ
đ c qu n b ng dây đ ng b c cách đi n.ượ ấ ằ ồ ọ ệ
b. C c t ph :ự ừ ụ
C c t ph đ t gi a các c c t chính và dùng đ c i thi n đ i chi uự ừ ụ ặ ữ ự ừ ể ả ệ ổ ề
c. Gông t :ừ
Dùng đ làm m ch t n i li n các c c t đ ng th i làm v máy.ể ạ ừ ố ề ự ừ ồ ờ ỏ
d. Các b ph n khácộ ậ
- N p máyắ
- C c u ch i than.ơ ấ ổ
1.2.1.2 Ph n quay (rotor)ầ
G m các b ph n sau:ồ ộ ậ
a. Lõi s t ph n ng:ắ ầ ứ
Lõi s t ph n ng dùng đ d n t . thông th ng dùng nh ng lá thép k thu tắ ầ ứ ể ẫ ừ ườ ữ ỹ ậ
đi n dày 0,5 mm ph cách đi n hai đ u r i ép ch t l i. Trên lá thép có d pệ ủ ệ ở ầ ồ ặ ạ ậ
hình d ng rãnh đ sau khi ép l i thì đ t dây qu n vàoạ ể ạ ặ ấ
b. Dây qu n ph n ng:ấ ầ ứ
Dây qu n ph n ng là ph n sinh ra s.đ.đ và có dòng đi n ch y qua. Th ng làmấ ầ ứ ầ ệ ạ ườ
b ng dây đ ng có b c cách đi n.Trong máy đi n nh th ng dùng dây có ti tằ ồ ọ ệ ệ ỏ ườ ế
di n tròn, trong máy đi n v a và l n th ng dùng dây ti t di n hình ch nh t.ệ ệ ừ ớ ườ ế ệ ữ ậ
Dây qu n đ c cách đi n v i rãnh c a lõi thép.ấ ượ ệ ớ ủ
c. C góp:ổ
C góp hay còn g i là vành góp hay vành đ i chi u dùng đ đ i chi u dòng đi nổ ọ ổ ề ể ổ ề ệ
xoay chi u thành m t chi u. c góp g m có nhi u phi n đ ng hình đuôi nh nề ộ ề ỏ ồ ề ế ồ ạ
cách đi n v i nhau b ng l p mica dày 0,4 đ n 1,2 mm và h p thành m t hình trệ ớ ằ ớ ế ợ ộ ụ
GVHD: Nguyên Thi Minh Tâm 3
SVTH: Nguyên Đinh Thinh !
Nguyên Văn Thông
tròn. Đuôi vành góp có cao h n lên m t ít đ đ hàn các đ u dây c a các ph n tơ ộ ể ể ầ ủ ầ ử
dây qu n vào các phi n góp đ c d dàng.ấ ế ượ ễ
d. Các b ph n khác:ộ ậ
- Cánh qu t: Dùng đ qu t gió làm ngu i máy.ạ ể ạ ộ
- Tr c máy: Trên đó đ t lõi s t ph n ng, c góp, cánh qu t và bi. Tr c máyụ ặ ắ ầ ứ ổ ạ ổ ụ
th ng làm b ng thép Cacbon t t. ườ ằ ố
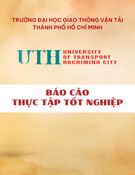
1.2.1.3 Nguyên lý làm vi c c a đ ng c đi n m t chi u:ệ ủ ộ ơ ệ ộ ề
A
B
Hình 1:S đ nguyên lý làm vi c c a đ ng c đi n 1 chi uơ ồ ệ ủ ộ ơ ệ ề
Khi cho đi n áp 1 chi u U đ t vào 2 ch i than A và B trong dây qu n ph nệ ề ặ ổ ấ ầ
ng có dòng đi n Iứ ệ ư các thanh d n ab, cd có dòng đi n n m trong t tr ng sẫ ệ ằ ừ ườ ẽ
ch u l c đi n t Fị ự ệ ừ đt tác d ng làm cho rotor quay, chi u l c t đ c xác đ nh theoụ ề ự ừ ượ ị
quy t c bàn tay trái. Khi ph n ng quay đ c n a vòng v trí các thanh d n ab, cdắ ầ ứ ượ ử ị ẫ
đ i ch nhau do có phi n góp đ i chi u dòng đi n gi cho chi u l c tác d ngổ ỗ ế ổ ề ệ ữ ề ự ụ
không đ i đ m b o đ ng c có chi u quay không đ i. Khi đ ng c quay cácổ ả ả ộ ơ ề ổ ộ ơ
thanh d n c t t tr ng s c m ng s c đi n đ ng Eẫ ắ ừ ườ ẽ ả ứ ứ ệ ộ ư chi u c a s.đ.đ xác đ nhề ủ ị
theo quy t c bàn tay ph i.ắ ả
đ ng c đi n m t chi u s c đi n đ ng EỞ ộ ơ ệ ộ ề ứ ệ ộ ư ng c chi u v i dòng đi n Iượ ề ớ ệ ư
nên Eư còn g i là s c ph n đi n đ ng.ọ ứ ả ệ ộ
Ph ng trình cân b ng đi n áp: U= Eươ ằ ệ ư+Rư.Iư
GVHD: Nguyên Thi Minh Tâm 4
SVTH: Nguyên Đinh Thinh !
Nguyên Văn Thông
+
-
I
F
F
a
b
c
d
I
n
®t
®t
Trong đó: Rư: đi n tr ph n ngệ ở ầ ứ
Iư: dòng đi n ph n ng ; Eệ ầ ứ ư: s c đi n đ ngứ ệ ộ
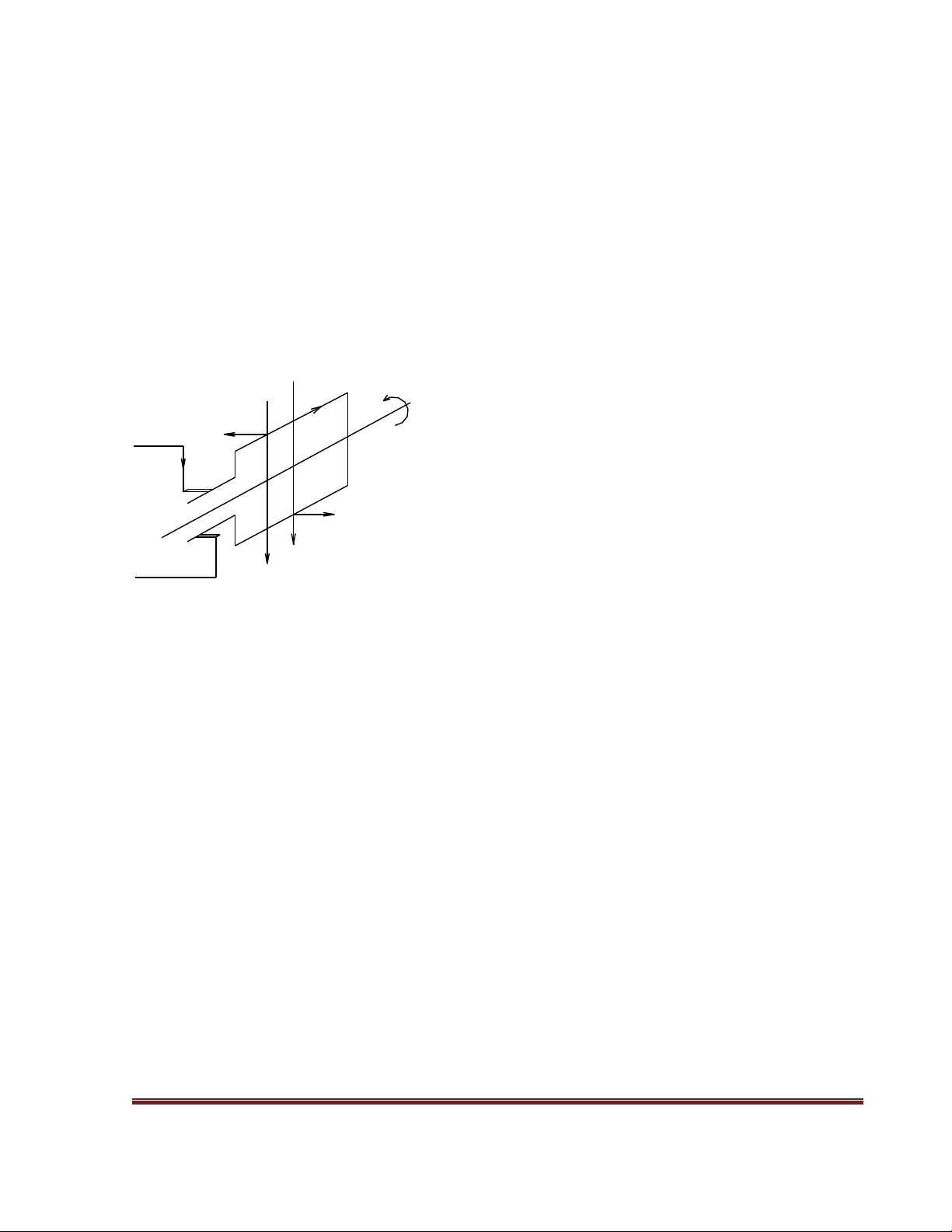
Theo yêu c u c a đ bài ta xét h đi u ch nh t c đ đ ng c điên m t chi uầ ủ ề ệ ề ỉ ố ộ ộ ơ ộ ề
kích r đ c l p. Đ ng c đi n m t chi u kích t đ c l p có dòng đi n kích từ ộ ậ ộ ơ ệ ộ ề ừ ộ ậ ệ ừ
không ph thu c vào dòng đi n ph n ng nghĩa là t thông c a đ ng c khôngụ ộ ệ ầ ứ ừ ủ ộ ơ
ph thu c vào ph t i mà ch ph thu c vào đi n áp và đi n tr m ch kích t .ụ ộ ụ ả ỉ ụ ộ ệ ệ ở ạ ừ
Hình2 : S đ n i dây đ ng c đi n 1 chi u kích t đ c l pơ ồ ố ộ ơ ệ ề ừ ộ ậ
1.2.1.4 Ph ng trình đ c tính c c a đ ng c đi n kích t đ c l pươ ặ ơ ủ ộ ơ ệ ừ ộ ậ
Đ c tính c là quan h gi a t c đ quay và mômen (M) c a đ ng c .ặ ơ ệ ữ ố ộ ủ ộ ơ
ng v i ch đ đ nh m c (đi n áp, t n s , t thông...) đ ng c v n hành chỨ ớ ế ộ ị ứ ệ ầ ố ừ ộ ơ ậ ở ế
đ đ nh m c v i đ c tính c t nhiên (Mộ ị ứ ớ ặ ơ ự đm , wđm).
Đ c tính c nhân t o c a đ ng c là đ c tính khi ta thay đ i các thông sặ ơ ạ ủ ộ ơ ặ ổ ố
ngu n hay n i thêm đi n tr ph , đi n kháng vào đ ng c .ồ ố ệ ở ụ ệ ộ ơ
Đ đánh giá, so sánh các đ c tính c ng i ta đ a ra khái ni m đ c ng đ c tínhể ặ ơ ườ ư ệ ộ ứ ặ
cơ đ c tính nh sau ượ ư
l n (đ c tính c c ng) t c đ thay đ i ít khi M thay đ iớ ặ ơ ứ ố ộ ổ ổ
nh (đ c tính c m m) t c đ gi m nhi u khi M tăng.ỏ ặ ơ ề ố ộ ả ề
GVHD: Nguyên Thi Minh Tâm 5
SVTH: Nguyên Đinh Thinh !
Nguyên Văn Thông
KT
U
-
+-
E
+-
U
I
I
KT
KT



![Báo cáo thực tập tốt nghiệp Công ty TNHH Cơ điện Samwa Tek: [Mô tả chi tiết hơn về nội dung báo cáo nếu có thể]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250917/trantiendat_ct2/135x160/96461758161119.jpg)
![Báo cáo thực tập tại Garage Car Plus [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250810/nguyenanhquoc2809@gmail.com/135x160/25661754896300.jpg)



![Đồ án tốt nghiệp: Tính toán, kiểm tra hệ thống điều hòa không khí cho tòa nhà Depot Tham Lương [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250717/vijiraiya/135x160/40421752722146.jpg)