TRƯỜNG ĐẠI HỌC s ư PHẠM KỸ THUẬT
THÀNH PHỐ HỒ CHÍ MINH
KHOA C ơ KHÍ CHẾ TẠO MÁY
ĐÈ THI CUỐI KỲ HỌC KỲ II NĂM HỌC 2021-2022
Môn: Cơ kỹ thuật
Mã môn học: ENME130620
Đề Số/Mã đề: 01 Đề thi cỏ 2 trang.
Thời gian: 90 phút.
Được phép sử dụng 1 ÍỜA4 chép tay hai mặt
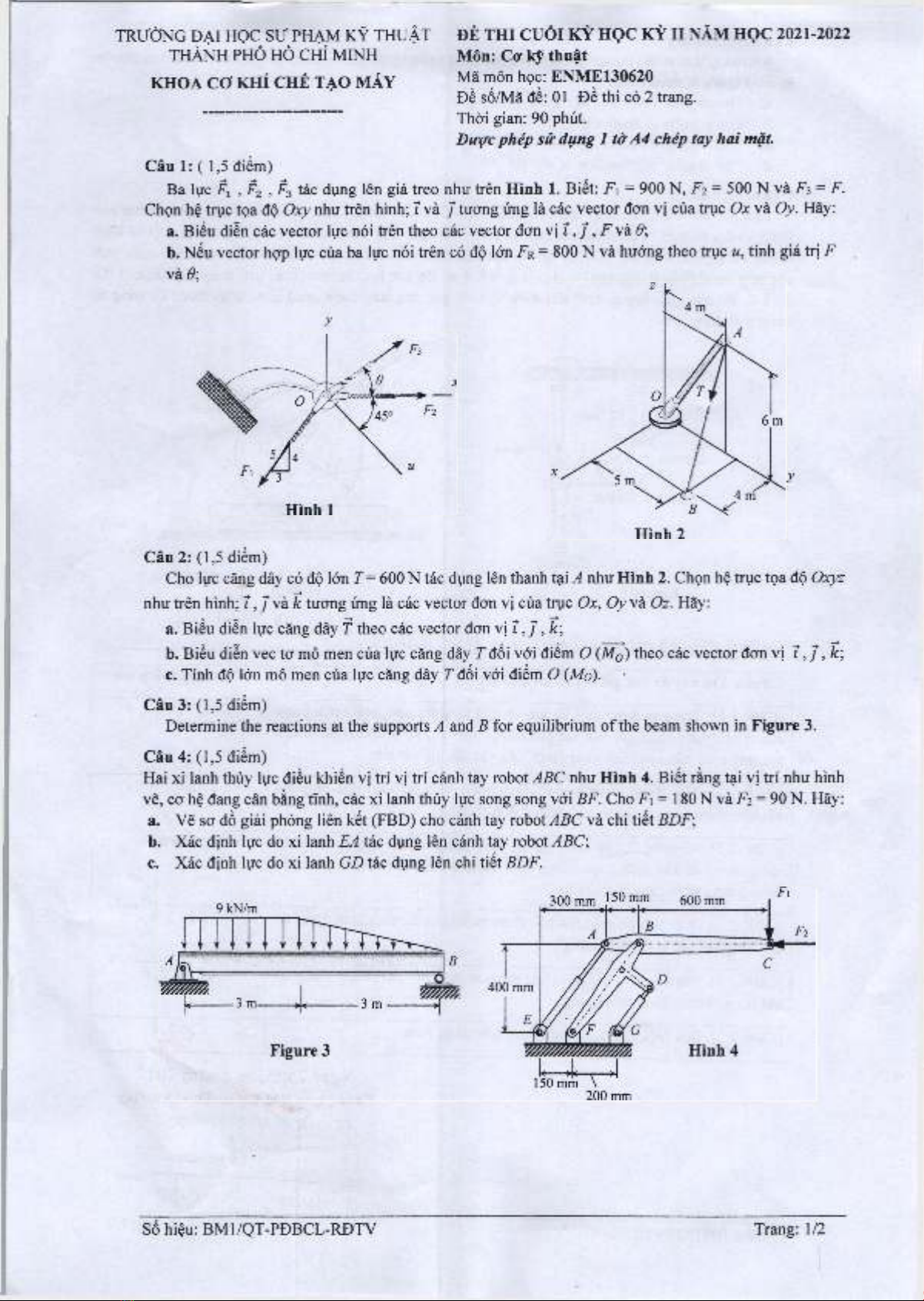
Câu 1 :(1,5 điểm)
Ba lực , F2 , F3 tác dụng lên giá treo như trên Hình 1 .Biết: F\ = 900 N, F i =500 N và F3 = F.
Chọn hệ trục tọa độ Oxy như trên hình; ? và / tương ứng là các vector đơn vị của trục Ox và Oy. Hãy:
a. Biểu diễn các vector lực nói frên theo các vector đơn VỊ i , 7 , F và ớ;
b. Nếu vector hợp lực của ba lực nói trên có độ lớn Fr = 800 N và hướng theo trục u, tính giá trị F
và ớ;
Câu 2 :(1,5 điềm)
Cho lực căng dây có độ lớn T = 600 N tác dụng lên thanh tại A như Hình 2. Chọn hệ trục tọa độ Oxyz
như trên hình; ĩ , / và /c tương ứng là các vector đơn vị của trục Ox, Oy và Oz. Hãy:
a. Biểu diễn lực căng dây T theo các vector đơn VỊ 1 ,7 , /c;
b. Biểu diễn vec tơ mô men của lực căng dây r đối vởi điểm ỡ (M0) theo các vector đơn vị ĩ ,
ア,
c. Tính độ lớn mô men của lực căng dây T đối với điểm 0 {M
〇
).
Câu 3:(1,5 điểm)
Determine the reactions at the supports A and B for equilibrium of the beam shown in Figure 3.
Câu 4 :(1,5 điểm)
Hai xi lanh thủy lực điều khiển vị frí vị frí cánh tay robot ABC như Hỉnh 4. Biết rằng tại vị ừí như hình
vẽ, cơ hệ đang cân bằng tĩnh, các xi lanh thủy lực song song với BF. Cho F i=180 N và F2 = 90 N. Hãy:
a. Vẽ sơ đồ giải phóng liên kết (FBD) cho cánh tay robot ABC và chi tiết BDF;
b. Xác định lực do xi lanh EA tác dụng lên cánh tay robot ABC;
c. Xác định lực do xi lanh GD tác dụng lên chi tiết BDF.
Sô hiệu: BM1/QT-PĐBCL-RĐTV Trang:1/2
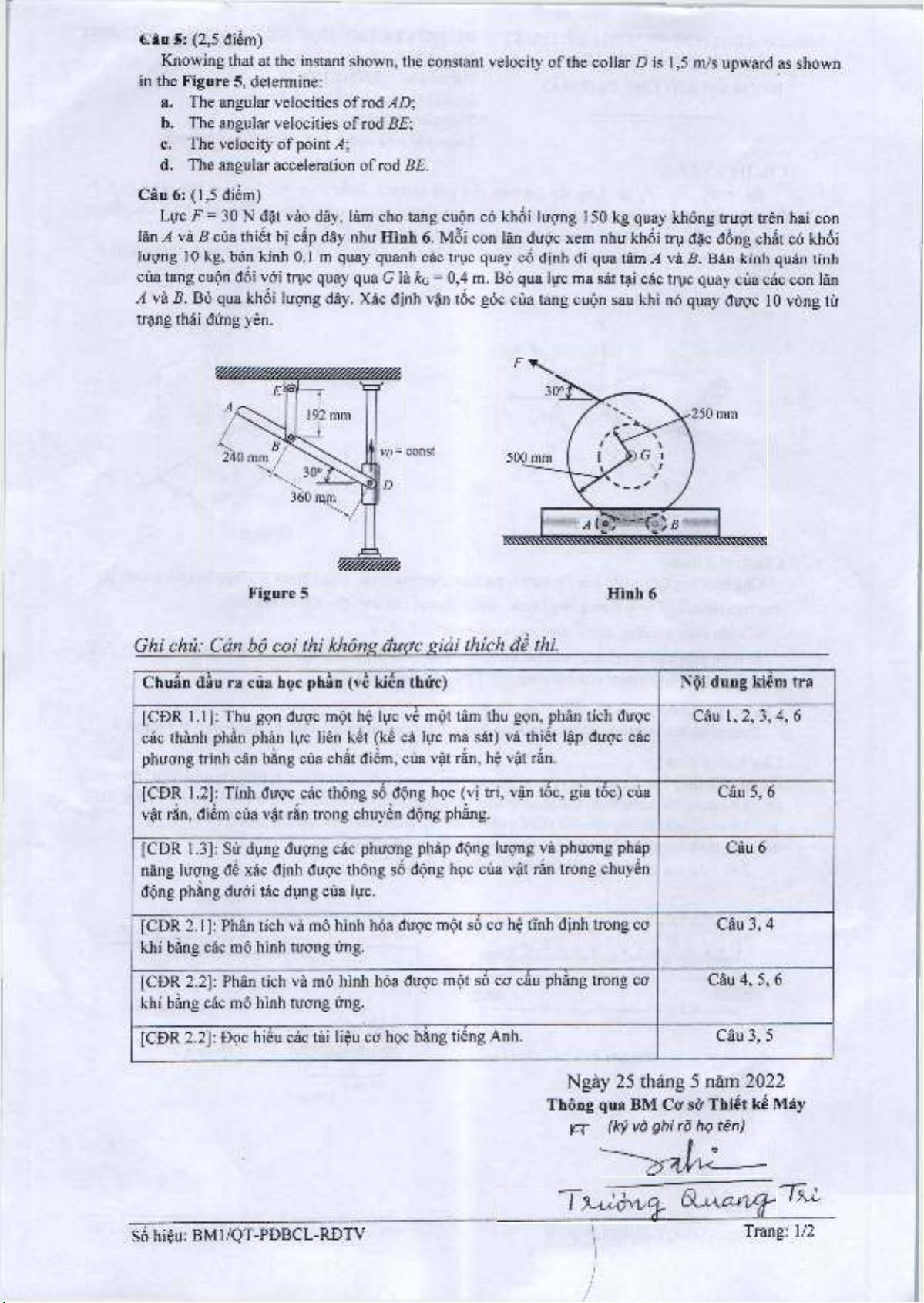
€ấu 5: (2,5 điểm)
Knowing that at the instant shown, the constant velocity of the collar Z) is 1,5 m/s upward as shown
in the Figure 5, determine:
a. The angular velocities of rod AD\
b. The angular velocities of rod BE;
c. The velocity of points;
d. The angular acceleration of rod BE.
Câu 6:(1,5 điểm)
Lực F = 30 N đặt vào dây, làm cho tang cuộn có khối lượng 150 kg quay không trượt trên hai con
lăn Ả vàB của thiết bị cấp dây như Hình 6. Mỗi con lăn được xem như khối trụ đặc đồng chất có khối
lượng 10 kg? bán kính 0,1 m quay quanh các trục quay cố định đi qua tâm A và B. Bán kính quán tính
của tang cuộn đối với trục quay qua ơ là = 0,4 m. Bỏ qua lực ma sát tại các trục quay cùa các con lăn
A và B. Bỏ qua khối lượng dây. Xác định vận tốc góc của tang cuộn sau khi nó quay được 10 vòng từ
trạng thái đứng yên.
Figure 5 Hình 6
Ghi chủ: Cán bô coi thi không đươc gịải thích đề thi.
Chuẩn đầu ra của học phần (về kỉến thức) Nội dung kiểm tra
[CĐR 1.1]:Thu gọn được một hệ lực về một tâm thu gọn, phân tích được
các thành phần phản lực liên kết (kể cả lực ma sát) và thiết lập được các
phương trình cân bằng của chất điểm, của vật rắn, hệ vật rắn.
Câu 1,2, 3, 4,6
[CĐR 1.2]: Tính được các thông số động học (vị trí, vận tốc, gia tốc) của
vật rắn, điểm của vật rắn trong chuyển động phang.
Câu 5, 6
[CĐR 1.3]: Sử dụng đượng các phương pháp động lượng và phương pháp
năng lượng để xác định được thông số động học của vật rắn trong chuyển
động phang dưới tác dụng của lực.
Câu 6
[CĐR 2.1]:Phân tích và mô hình hóa được một số cơ hệ tĩnh định trong cơ
khí bằng các mô hình tương ứng.
Câu 3, 4
[CĐR 2.2]: Phân tích và mô hình hóa được một số cơ cấu phẳng trong cơ
khí bằng các mô hình tương ứng.
Câu 4, 5, 6
[CĐR 2.2]: Đọc hiểu các tài liệu cơ học bằng tiếng Anh. Câu 3, 5
Số hiệu: BM1/QT-PĐBCL-RĐTV
Ngày 25 tháng 5 năm 2022
Thông qua BM Cơ sở Thiết kế Máy
ỊTT (ký và ghi rõ họ tên)
Trang:1/2















![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)