1
LỜI NÓI ĐẦU
Cùng với sự phát triển của nền kinh tế thế giới thì việc vận chuyển hàng
hoá xuất khẩu giữa các nước trên thế giới bằng container đang ngày một trở
nên phổ biến, bởi việc vận chuyển container đã phần nào đáp ứng được các
yêu cầu về kinh tế như giảm thời gian xếp dỡ hàng hoá ở cảng, tăng năng suất
vận chuyển hàng hoá tại cảng, từ đó giảm thời gian tàu chờ xếp dỡ hàng ở
cảng, nâng cao hiệu quả kinh tế khai thác tàu. Ngoài ra, vận chuyển bằng
container còn làm tăng khả năng bảo vệ hàng hoá, giảm tổn thất do hư hỏng
mất mát trong quá trình vận chuyển… các yếu tố này có vai trò quan trọng đối
với ngành giao thông vận tải. Do đó các phương tiện, thiết bị xếp dỡ container
cũng ngày càng phổ biến, đa dạng. Và cùng với sự phát triển của khoa học kỹ
thuật thì các thiết bị này cũng ngày càng hiện đại.
Sau một thời gian học tập và nghiên cứu tại trường Đại học Dân lập Hải
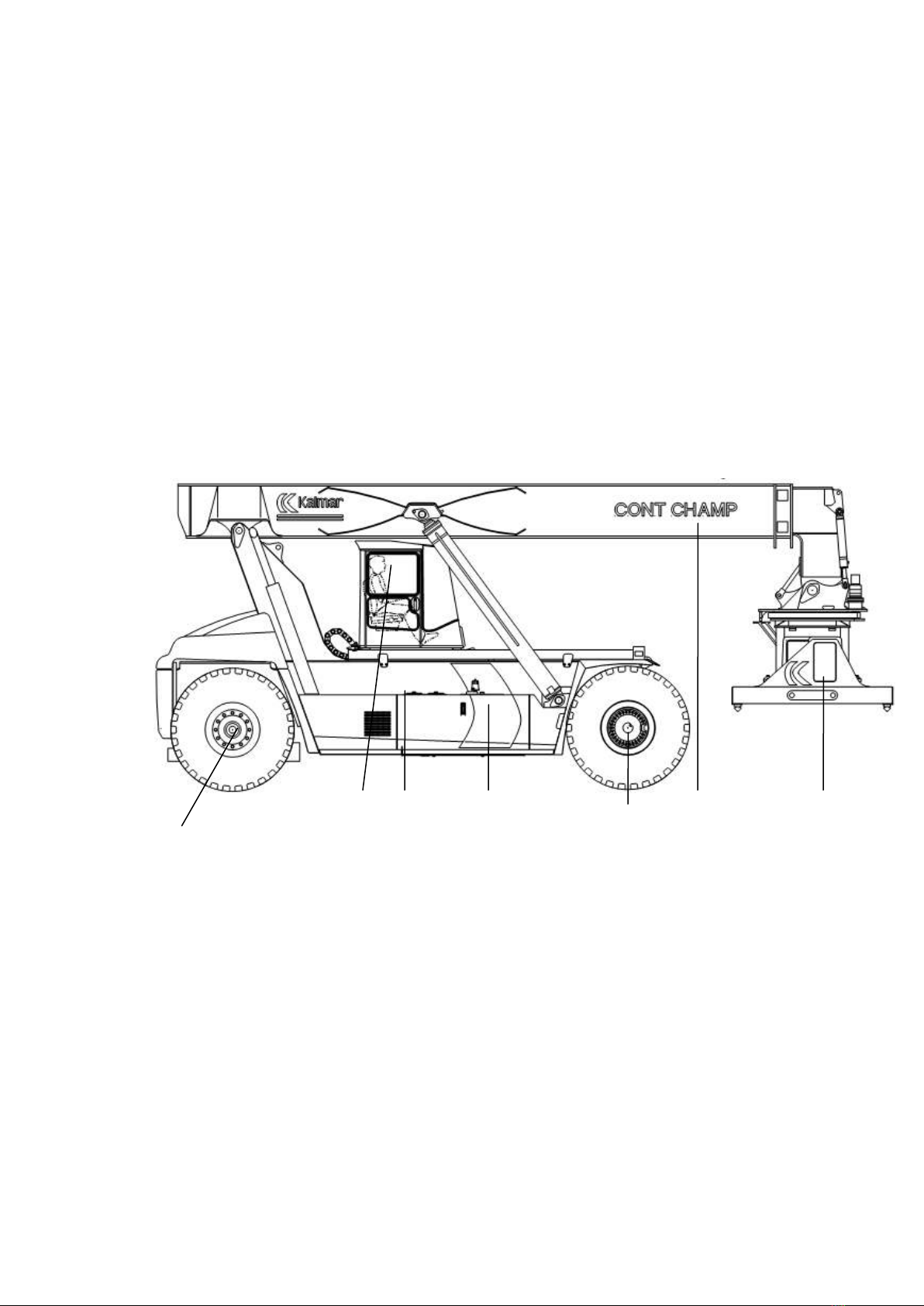
Phòng, em được giao làm đồ án tốt nghiệp với đề tài “Mô phỏng hệ thống
thuỷ lực xe cẩu container Kalmar”.
Trong đồ án này em xin giới thiệu về xe container Kalmar, phân tích một
số sơ đồ điện và sơ đồ thuỷ lực của xe, giới thiệu phần mềm mô phỏng thuỷ
lực Automation Studio.
Nội dung cụ thể bao gồm:
Chƣơng 1: Giới thiệu tổng quan về xe cẩu container Kalmar.
Chƣơng 2: Hệ thống thuỷ lực xe nâng hàng container Kalmar DRF 450.
Chƣơng 3: Mô phỏng hệ thống thuỷ lực xe cẩu container Kalmar DRF
450.
Trong quá trình thực hiện đề tài, với sự nỗ lực của bản thân em đã cố
gắng vận dụng các kiến thức đã học để thực hiện nội dung đề tài này. Bên
cạnh đó em luôn nhận được sự hướng dẫn nhiệt tình của thày giáo Ths. Đặng
Hồng Hải - Giảng viên trường Đại học Hàng Hải và các thày giáo, cô giáo
khoa Điện - Điện tử truờng Đại học Dân Lập Hải Phòng cùng với sự giúp đỡ
của gia đình, bạn bè em đã hoàn thành bản đồ án tốt nghiệp này. Trong quá
trình làm đồ án mặc dù đã cố gắng nhiều nhưng vì trình độ, kinh nghiệm và