http://www.ebook.edu.vn
CHƯƠNG 4
NGHIÊN CỨU ĐỘNG LỰC HỌC CỦA MÁY TRỤC
KHI DI CHUYỂN
4.1. Động lực học của máy trục trong trường hợp di chuyển
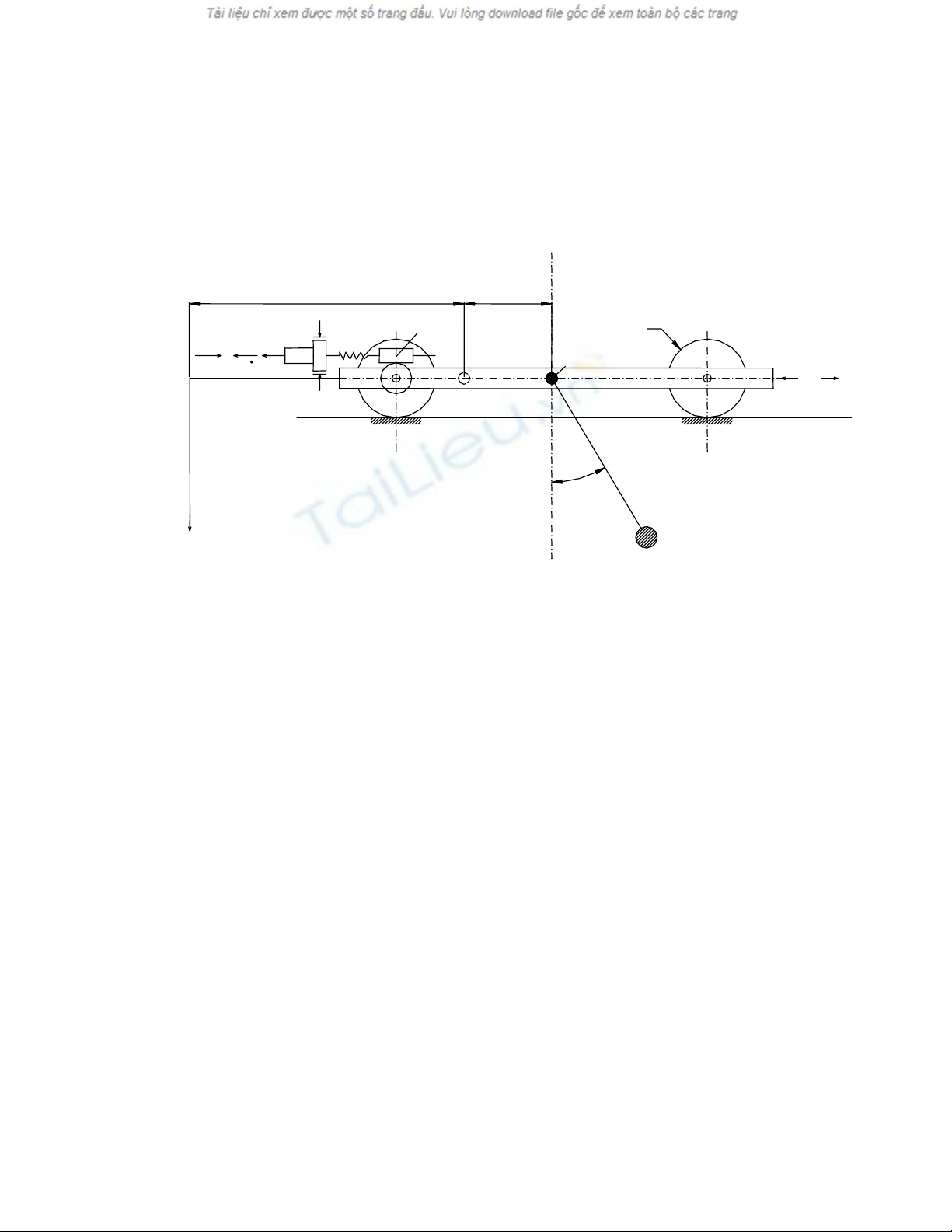
Xét một loại máy trục khi di chuyển trên ray có mô hình động lực học như
trên hình 4.1
Với:
1
- Mô men quán tính của rô to động cơ và khớp nối
m2- Khối lượng quy dẫn của máy trục
m3- Khối lượng của hàng nâng
q1, q2, q3- Các toạ độ suy rộng
q1- Chuyển vịgóc của động cơ, rad
q2- Di chuyển của cầu trục, m
q3- Chuyển vịlắc của hàng, rad
Mf - Mômen phanh
)q(M 1
-Đường đặc tính cơ của động cơ bộ máy di chuyển
W - Tổng các lực cản di chuyển, N
l - Chiều dài dây cáp hàng
S - Độ cứng quy dẫn của bộmáy di chuyển vềtrục động cơ, Nm/rad
i - Tỷsốtruyền của cơ cấu dẫn động bộmáy di chuyển
Ởtrạng thái tĩnh ban đầu:
0Y;XX 202
TừHình 4-1, dựa trên các quan hệhình học, chúng ta có thể xác định được
các toạ độ của các khối lượng như sau:
q1
Mf
M(q1)
Si
m2W
L
q
3
x
0q2
D
o
y
x
m
3
Hình 4-1. Mô hình động lực học của máy trục
http://www.ebook.edu.vn
33320323
2202
111
qcoslY;qsinlqXqsinlXX
0Y;qXX
0Y;qX
Đạo hàm chúng ta có:
3
3
3
332
3
2
2
1
1
q.qsinlY
q.qcoslqX
qX
qX
Vận tốc của các khối lượng:
1
1
1qXV ; nên
2
1
2
1qV
2
2
2qXV ; nên
2
2
2
2qV
33
3YXV
Bình phương vận tốc của các khối lượng ta có:
2
33
22
323
2
33
22
2
2
2
3
2
3
2
3qqsinlqqqcosl2qqcoslqYXV
Cuối cùng: 323
2
3
2
2
2
2
3qqqcosl2qlqV
Biểu thức của hàm động năng:
2
3
3
2
2
2
2
1
1Vm
2
1
Vm
2
1
q
2
1
T (4-1)
Thay các kết quảbình phương vận tốc ởtrên vào biểu thức (4-1) chúng ta có:
)qqqcosl2qlq(m
2
1
qm
2
1
q
2
1
T32
3
2
3
2
2
2
3
2
2
2
2
1
1
(4-2)
Tính các đạo hàm theo biểu thức (4-2), chúng ta nhận được:
0
q
T
;q)
q
T
(
dt
d
;q
q
T
1
1
1
1
1
1
1
Vậy: 1
1
1
1
1q
q
T
)
q
T
(
dt
d
D
Cuối cùng: 111 qD
(4-3)
Tương tự ta có:
2
2
2q
T
)
q
T
(
dt
d
D
Tiến hành đạo hàm theo biểu thức (4-2), ta có:

http://www.ebook.edu.vn
2
333333232
2
3
3
3
2
3
2
2
2
qqsinlmqqcoslmq)mm()
q
T
(
dt
d
mqqcoslqmqm
q
T
Vì 0
q
T
2
Nên:
2
3333332322 qqsinlmqqcoslmq)mm(D
Vì q3nhỏnên coi 33 qqsin
Cuối cùng có:
2
3333332322 qqlmqqcoslmq)mm(D
(4-4)
Tương tự, tiến hành đạo hàm động năng theo công thức (4-2) đối với 3
q
và q3ta
có:
32
33
3
32332333
2
3
3
2333
2
3
3
qqqsinlm
q
T
qqqsinlmqqcoslmqlm)
q
T
(
dt
d
qqcoslmqlm
q
T
Cuối cùng ta có:
2333
2
33 qqcoslmqlmD (4-5)
Hàm thế năng của hệ:
Thế năng tích luỹ trong lò xo S:
2
2
1
2
2
1
2
211 2
1
2
2
1
2
1)
R
q
q(S)
D
i.q
q(S)qq(SU *
Với:
i
D
R
2
Thế năng vị trí của hàng nâng:
)qcos(glm)qcosll(gmghmU 333332 1
Tổng thế năng của hệ:
)qcos(glm)
R
q
q(SUUU 33
2
2
121 1
2
1 (4-6)

http://www.ebook.edu.vn
Dặt
i
iq
U
P
và tiến hành đạo hàm đạo hàm U theo công thức (4-6) đối với
các tạo độ qi, ta có:
33
3
3
2
1
2
2
2
1
1
1
qsinglm
q
U
P
)
R
q
q(
R
S
q
U
P
)
R
q
q(S
q
U
P
với q3nhỏ33 qqsin
, nên ta có thểlấy: 333 glqmP
Xác định các lực suy rộng Qi:
Dễdàng thấy:
)q(signg)mm()q(signQ
)q(MQ
2
32
2
2
11
Với: - hệsốcản di chuyển
0
3
Q
Chúng ta có phương trình chuyển động:
Sắp xếp dưới dạng: iii QPD
, ta có:
0glqmqlmqqcoslm
)q(signg)mm()
R
q
q(
R
S
qqsinlmqqcoslmq)mm(
)q(M)
R
q
q(Sq.
333
2
3233
232
2
1
2
333333232
1
2
1
1
1
(4-7)
Với: q3nhỏ1qcos;qqsin 333
, thay kết quảnày vào (4-7), chúng ta
viết lại dưới dạng ma trận như sau:
fSM
qq (4-8)
0
)q(Wsign
)q(M
q
q
q
.
glm00
qlmR/SR/S
0R/SS
q
q
q
.
lmlm0
lmmm0
00
2
1
3
2
1
3
2
33
2
3
2
1
2
33
332
1
(4-9)
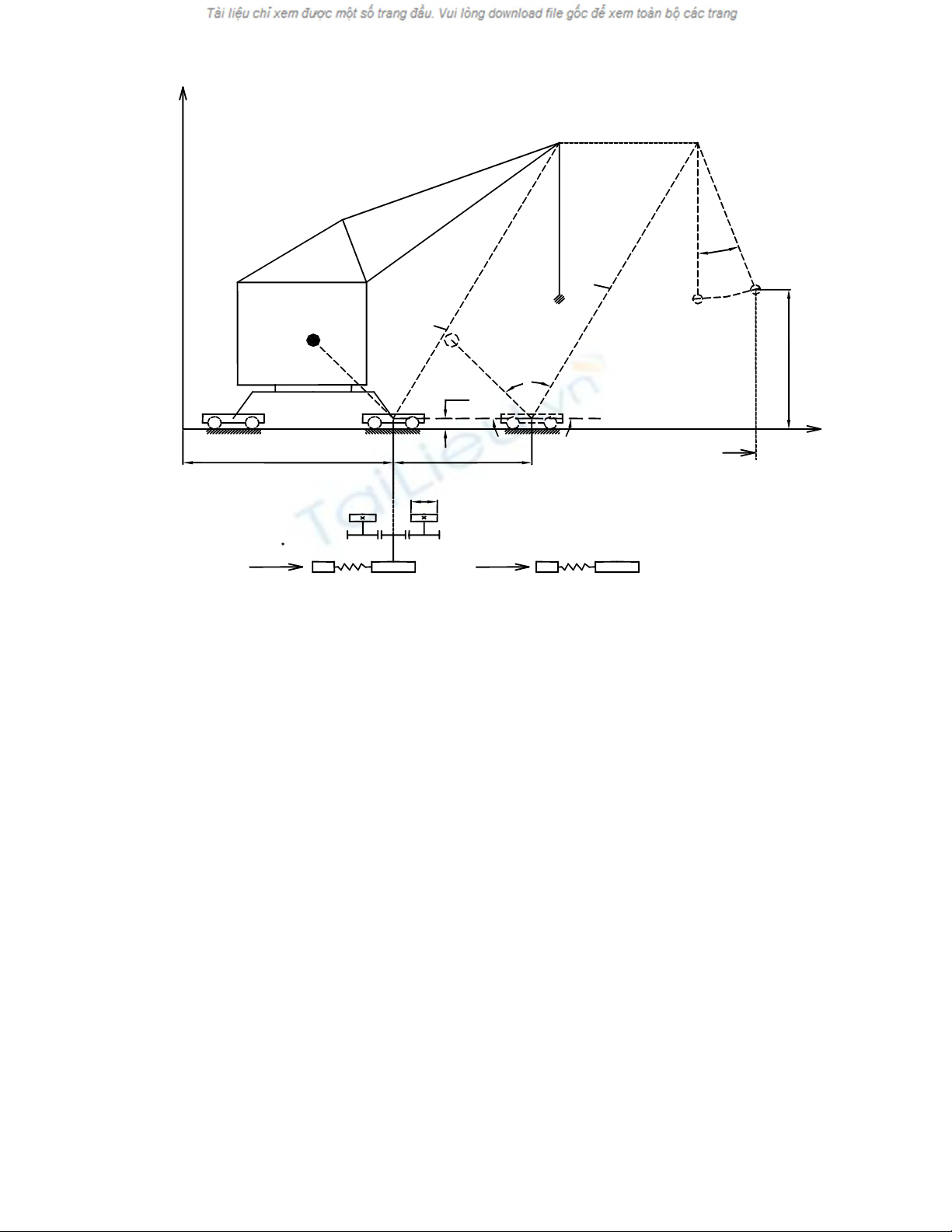
4.2. Động lực học của cần trục tháp khi di chuyển
Để đơn giản, chúng ta chưa xét đến ảnh hưởng của lực cản do gió và lực cản
do độ dốc của nền:
http://www.ebook.edu.vn
o
m3
R3
R
2
A
m3(x3,y3)
R3
A
R2
BB'
m2
m2
f
X2
S
1
M(q 1)Sq1
q2
q3
y
2
y
x
D
x0
y0
Trong đó:
m3- Khối lượng quy đổi của toàn bộcần trục vềtrọng tâm của nó
m2- Khối lượng của hàng
f - Chiều dài cáp hàng từmóc câu tới đỉnh cần
(x2,y2) - Toạ độ của hàng ởthời điểm xét
(x0,y0) - Toạ độ ban đầu của bộmáy di chuyển
1
-Mômen quán tính quy đổi vềtrục động cơ của bộmáy di chuyển, kgm2
)q(M 1
-Đường đặc tính cơ của động cơ bộ máy di chuyển
D - Đường kính bánh xe, m
S - Độ cứng quy đổi của bộmáy di chuyển vềtrục động cơ, N/rad
R3- Khoảng cách từbộmáy di chuyển đến trọng tâm cần trục, m
R2- Khoảng cách từbộmáy di chuyển đến đỉnh cần, m
(x3,y3) - Toạ độ trọng tâm của máy trục ởthời điểm xét
q1,q2,q3- Các toạ độ suy rộng
với: q1-Độ dịch chuyển góc của trục động cơ, rad
q2-Độ di chuyển của cần trục, m
q3- Chuyển vịgóc của cáp hàng quanh đỉnh cần, rad
Hình 4-2. Mô hình động lực học của cần trục tháp khi di chuyển


![Các loại máy thi công xây dựng không thể thiếu [năm hiện tại]](https://cdn.tailieu.vn/images/document/thumbnail/2020/20200526/lanqiren/135x160/6901590455715.jpg)


![Bảng giá ca máy và thiết bị chuyên dùng khảo sát, thí nghiệm [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2020/20200526/lanqiren/135x160/8121590455736.jpg)















![Gia Công & Lắp Đặt Cốt Thép: Kỹ Thuật Xây Dựng Bê Tông [Chuẩn Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260531/alfredodistefano10/135x160/58891780257145.jpg)
![Gia Công Ván Khuôn: Lắp Dựng, Tháo Dỡ và Kỹ Thuật Xây Dựng [Chi Tiết A-Z]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260531/alfredodistefano10/135x160/4261780257147.jpg)


%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)