Quá tải
goal
XtX )( hay dưới mức tải
goal
XtX )( đều không mong muốn và
được coi là không có hiệu quả như nhau. Thuật toán hiệu quả khi η tiến gần tới 1,
nghĩa là X(t) tiến gần tới Xgoal.
Chú ý, tính hiệu quả chỉ có liên quan đến tổng lượng phân phối và do đó 2
lượng phân phối khác nhau có thể cả hai đều hiệu quả miễn là tổng lượng phân phối
là gần đến “goal”. Sự phân bố của tổng lượng phân phối giữa các người dùng được
đo bởi chỉ tiêu bình đẳng.
2.4.2 Tính bình đẳng (Fairness)
Khi nhiều người dùng chia sẻ tài nguyên, tất cả người dùng trong cùng một
lớp dịch vụ phải có chia sẻ như nhau về tài nguyên. Thường thì sự phân bổ không
bằng nhau một cách chính xác, mức độ bình đẳng được đo bởi chỉ số bình đẳng. Chỉ
số bình đẳng được định nghĩa khái quát trong [7] như sau:
)(
)( 2
2
i
i
xn
x
xF (2.2)
Chỉ số này có các đặc tính sau đây:
10 xF . Lượng phân phối bình đẳng (với tất cả lượng i
x bằng nhau) có
tính bình đẳng là 1 và lượng phân phối không bình đẳng (với tất cả các tài nguyên
chỉ dùng cho một người) có tính bình đẳng là 1/n đạt đến 0 khi n tiến tới vô cùng.
Tính bình đẳng độc lập vào thang đo, tức là, đơn vị đo là không quan trọng.
Tính bình đẳng là hàm liên tục. Một vài sự thay đổi nhỏ trong lượng phân bố
cũng thấy trong tính bình đẳng.

Nếu chỉ có k trong n người dùng chia sẻ tài nguyên như nhau với (n - k)
người dùng không nhận tài nguyên nào, thì tính bình đẳng là k/n.
Ta có các đặc tính khác trong [13]
Thuật toán bình đẳng khi F tiến gần tới 1. Tuy nhiên, chỉ số này chỉ biểu diễn
tính bình đẳng giữa các người dùng mạng nói chung mà chưa thể hiện được bản
chất đa dịch vụ trong mạng thế hệ mới. Trong mạng NGN sẽ có nhiều lớp dịch vụ
khác nhau, sử dụng nhiều hệ giao thức vận chuyển khác nhau. Vì vậy, cần thiết phải
đưa thêm hai chỉ số bình đẳng mới [2]:
− Chỉ số bình đẳng giữa các giao thức cùng họ:
ji
F
/
1 (2.3)
trong đó θi và θj là thông lượng của các giao thức i và j cùng sử dụng cho một lớp
ứng dụng.
− Chỉ số bình đẳng giữa các giao thức khác họ:
j
i
F
2 (2.4)
trong đó θi và ωj là thông lượng của các giao thức i và j khác họ sử dụng cho các
lớp ứng dụng khác nhau.
2.4.3 Tính hội tụ (Convergence)
Sự hội tụ được đánh giá bởi thời gian cần để hệ thống đạt đến trạng thái
mong muốn từ một trạng thái xuất phát bất kỳ. Một cách lý tưởng, hệ thống đạt tới
trạng thái đích nhanh và có biên độ dao động rất nhỏ xung quanh nó.
Như vậy, tính hội tụ được đánh giá qua 3 yếu tố:
Trạng thái cân bằng tiệm cận với Xgoal .
Thời gian cần thiết để thuật toán hội tụ đến Xgoal .
Biên độ của dao động xung quanh giá trị Xgoal nhỏ dần.
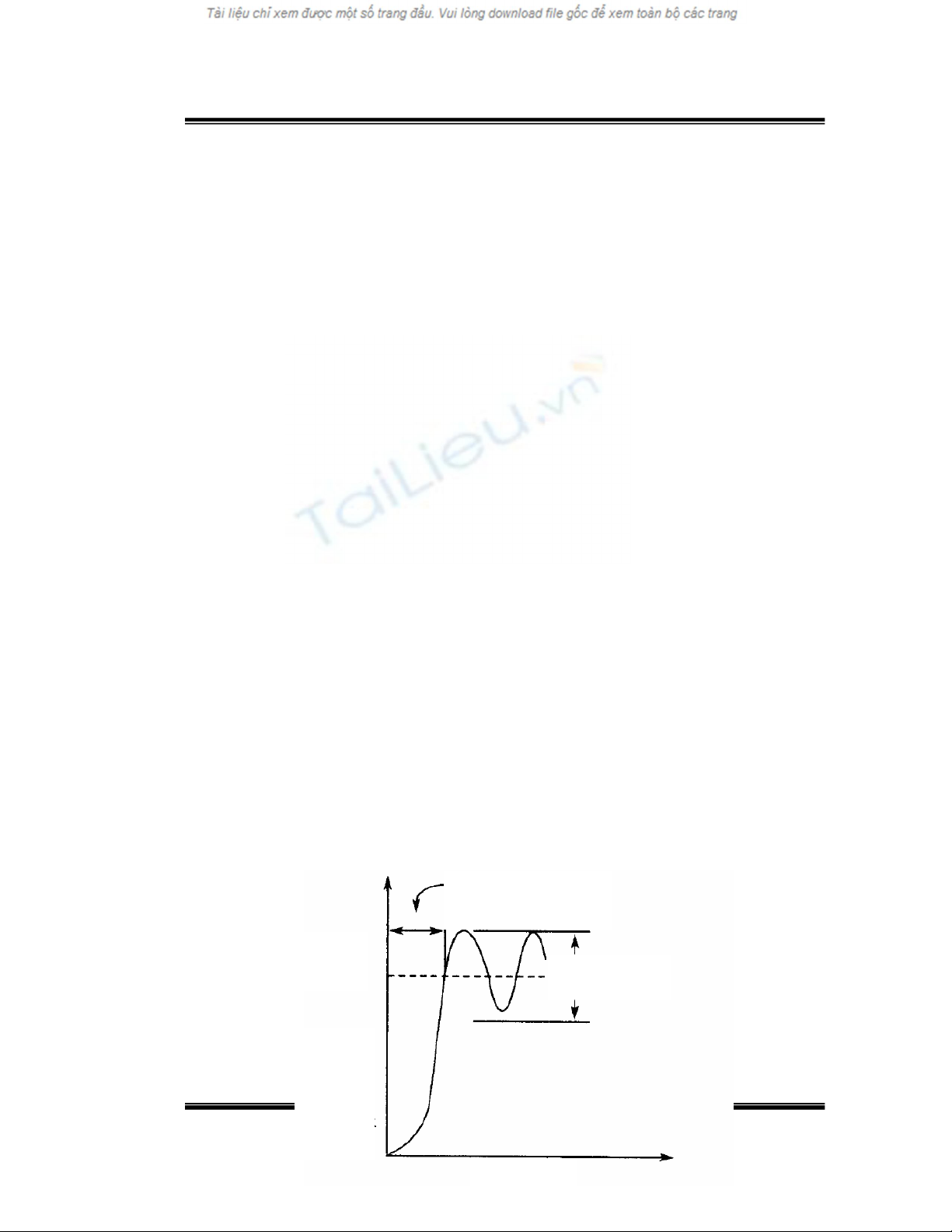
Thời gian để đạt được trạng thái cân bằng (equilibrium) xác định độ nhạy
(responsiveness) và độ dao động xác định độ mịn (smoothness) của phương pháp
điều khiển. Một cách lý tưởng, chúng ta muốn thời gian cũng như sự dao động phải
nhỏ. Do đó, điều khiển với thời gian nhỏ và biên độ nhỏ của dao động gọi là nhạy
hơn và mịn hơn, như trong hình 2.5.
2.4.4 Thời gian đáp ứng nhanh (Small response time)
Thuật toán phải nhanh chóng phát hiện được tắc nghẽn và thời gian kể từ khi
phát hiện tắc nghẽn đến khi có tác động của điều khiển chống tắc nghẽn phải càng
nhanh càng tốt: Tresp ≤ Tgoal - trong đó Tgoal là cơ sở để so sánh các thuật toán điều
khiển.
Độ nhạy
Độ mịn
Tổng
lưu
lượng
mạng
Thời gian
“Goal”

Hình 2.5 Độ nhạy (responsiveness) và độ mịn (smoothness).
2.4.5 Độ mịn trong điều khiển (Smoothness)
Trong thực tế, tác động của điều khiển không thể đưa hệ thống đến trạng thái
mong muốn ngay lập tức. Vì vậy, các thuật toán điều khiển chống tắc nghẽn phải
thiết kế sao cho tác động điều khiển có độ mịn cần thiết, tránh đưa hệ thống vào
trạng thái mất ổn định thêm. Đại lượng để đo độ mịn có thể là hiệu số giữa lưu
lượng tại 2 thời điểm điều khiển liên tiếp t1 và t2: )(( 1)2 txtx ii hoặc hiệu số giữa
tổng lưu lượng mạng tại 2 thời điểm điều khiển liên tiếp t1 và t2: )()( 12 tXtX .
2.4.6 Tính phân tán (Distributedness)
Đây là điều cần thiết bởi vì một mô hình tập trung đòi hỏi thông tin đầy đủ
về trạng thái của mạng cũng như các luồng riêng lẻ, và điều này là không thể không
có đối với mạng cỡ lớn. Chẳng hạn, chúng ta muốn biết về các nhu cầu cá nhân hay
toàn bộ. Thông tin này có thể hữu dụng tại nguồn tài nguyên. Tuy nhiên, truyền đạt
thông tin này cho nhiều người dùng làm chúng ta quan tâm đến mào đầu
(overhead), đặc biệt khi một người dùng có thể dùng vài nguồn tài nguyên
(resource) tại cùng một thời điểm. Do đó, chúng ta phải quan tâm hàng đầu đến

phương pháp điều khiển có thể thực hiện trong hệ thống thực và giả sử rằng hệ
thống có lượng phản hồi ít nhất. Nó chỉ cho ta biết nơi nào là không đủ tải hay quá
tải thông qua bit phản hồi nhị phân. Thông tin khác như Xgoal và số lượng người
dùng cùng chia sẻ nguồn tài nguyên được giả thiết là không được biết bởi người
dùng. Điều này hạn chế phương pháp khả thi.
Như vậy, mô hình có thể xây dựng để đánh giá các phương pháp điều khiển
chống tắc nghẽn cho mạng NGN có thể được thiết kế dựa trên sáu tiêu chí cơ bản
nêu trên.
2.5 Thuật toán tăng giảm
2.5.1 Thuật toán tăng giảm
Trong hình 2.6 mô tả mạng với n người dùng nó. Tình trạng tắc nghẽn của hệ
thống được xác định bởi số gói trong hệ thống. Thời gian được chia thành các khe
rời rạc. Những khe đó đặc trưng căn bản cho các khoảng bắt đầu khi người dùng
thiết lập mức tải dựa vào phản hồi mạng nhận trong các khoảng trước. Nếu trong
suốt khe thời gian t, người dùng thứ i là )(txi, sau đó tải tổng cộng tại tài nguyên
thắt cổ chai là
)(txi, và trạng thái của hệ thống biểu thị bởi vector có độ dài n
)(),...,(),()( 21 txtxtxtx n
. Khi chúng ta đang hoạt động tại hay gần điểm Knee, mọi
tài nguyên yêu cầu bởi người dùng được chấp nhận (điều này không đúng tại điểm
cliff). Do đó, xi(t) biểu thị người dùng thứ i.



















![Đề thi cuối kì Nhập môn Mạng máy tính: Tổng hợp [Năm]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251110/nminhthoi53@gmail.com/135x160/38281762757217.jpg)



![Đề thi học kì 2 môn Nhập môn Mạng máy tính [kèm đáp án]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251014/lakim0906/135x160/23811760416180.jpg)
