2
+ Phân tích động lực học thuận cơ cấu có khâu đàn hồi khi không có
lực điều khiển và khi có lực điều khiển bổ sung.
+ Tuyến tính hóa phương trình động lực học và phân tích dao động
của cơ cấu có khâu đàn hồi ở chế độ làm việc bình ổn.
Bố cục của luận án
Ngoài phần mở đầu và kết luận, luận án gồm 4 chương nội dung.
+ Chương 1: Giới thiệu tổng quan về cơ cấu máy và robot có khâu
đàn hồi
+ Chương 2: Trình bày việc thiết lập phương trình vi phân chuyển
động cho một số cơ cấu có một hoặc vài khâu đàn hồi
+ Chương 3: Chương này nghiên cứu bài toán điều khiển cơ cấu có
khâu đàn hồi bằng cách bổ sung thêm lực điều khiển ở các khâu dẫn, nhằm
hạn chế ảnh hưởng của biến dạng đàn hồi đến chuyển động của cơ cấu.
Tính toán mô phỏng số bài toán động lực học thuận cơ cấu có khâu đàn hồi
khi chưa có lực điều khiển bổ sung và khi có lực điều khiển bổ sung.
+ Chương 4: Đề xuất phương pháp tuyến tính hóa phương trình vi
phân chuyển động của hệ nhiều vật có cấu trúc mạch vòng, áp dụng cho
trường hợp các cơ cấu có khâu dẫn quay đều. Từ đó sử dụng phương pháp
Newmark để tính toán dao động bình ổn này.
CHƯƠNG 1. TỔNG QUAN VỀ VẤN ĐỀ NGHIÊN CỨU
1.1. Cơ cấu có khâu đàn hồi
Tùy thuộc vào kích thước, các đặc trưng chịu lực cũng như yêu cầu
kỹ thuật mà từng khâu của cơ cấu có thể được xem là khâu rắn tuyệt đối hay
khâu đàn hồi. Cũng theo đó mà cơ cấu khảo sát có thể được xem là không có
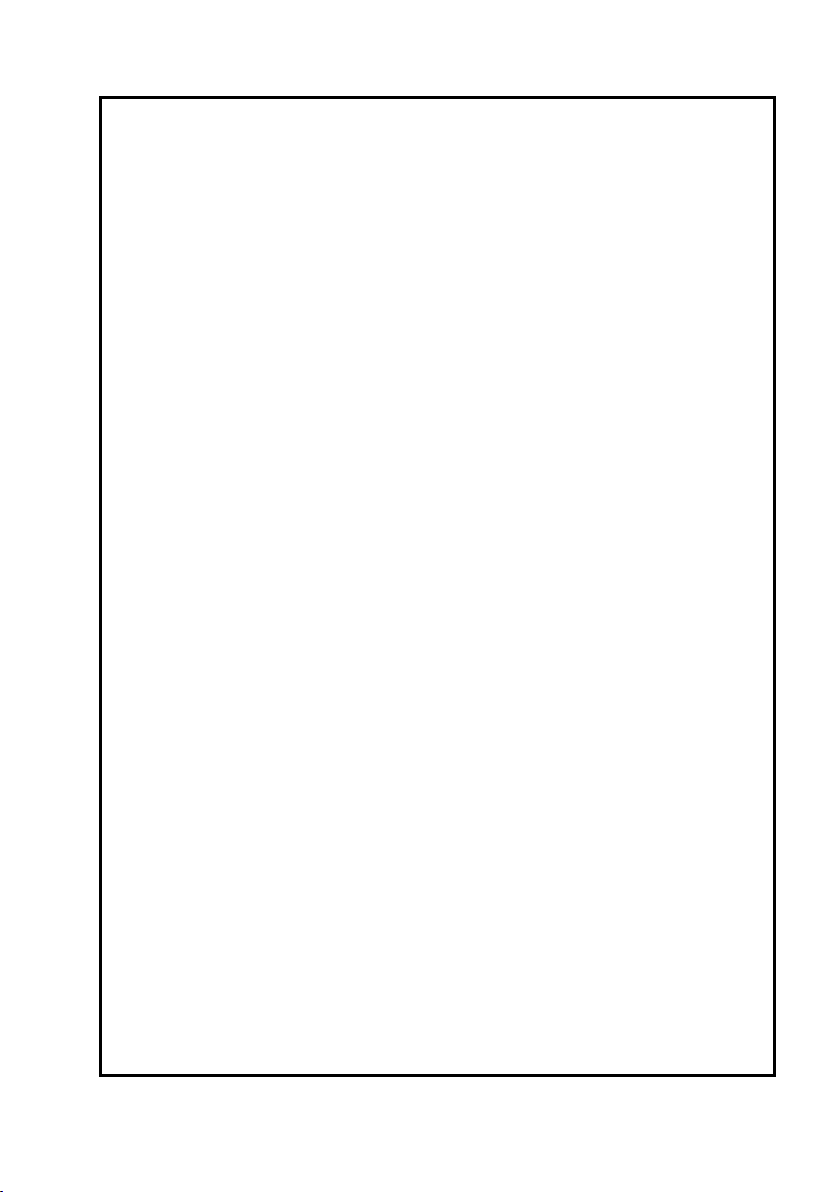
hoặc có một, hai hay nhiều khâu đàn hồi. Ví dụ như trong Trong Hình 1.2 là
sơ đồ cơ cấu 6 khâu, khâu dẫn 1, tấm 3 và khâu bị dẫn 5 có thể xem là vật
rắn, còn thanh truyền 2 và 4 thường dài và mảnh hơn nên có thể xem là vật
rắn đàn hồi. Như vậy cơ cấu này được xem xét có 2 khâu đàn hồi là phù hợp.
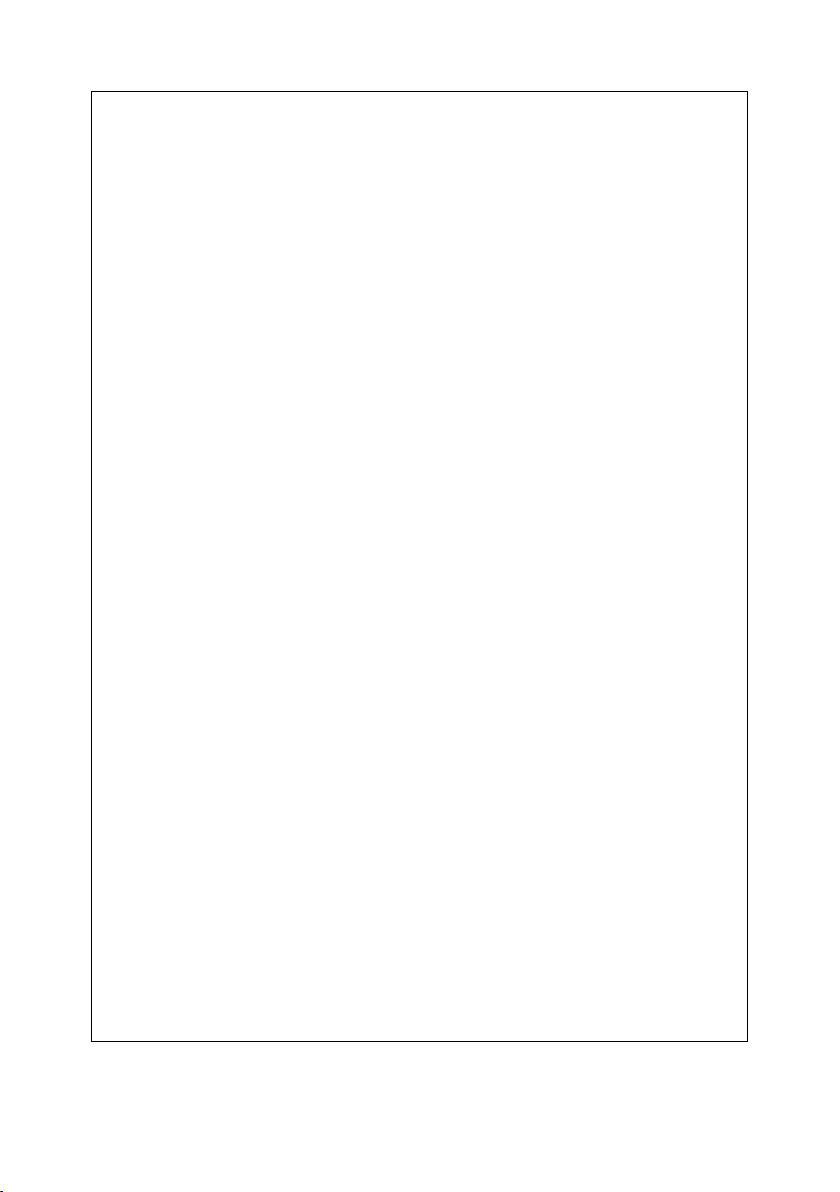
Trong Hình 1.3 là tay máy hai bậc tự do, trong tay máy thì độ chính xác vị trí
của điểm tác động cuối là quan trọng, các khâu coi như vật đàn hồi. Còn
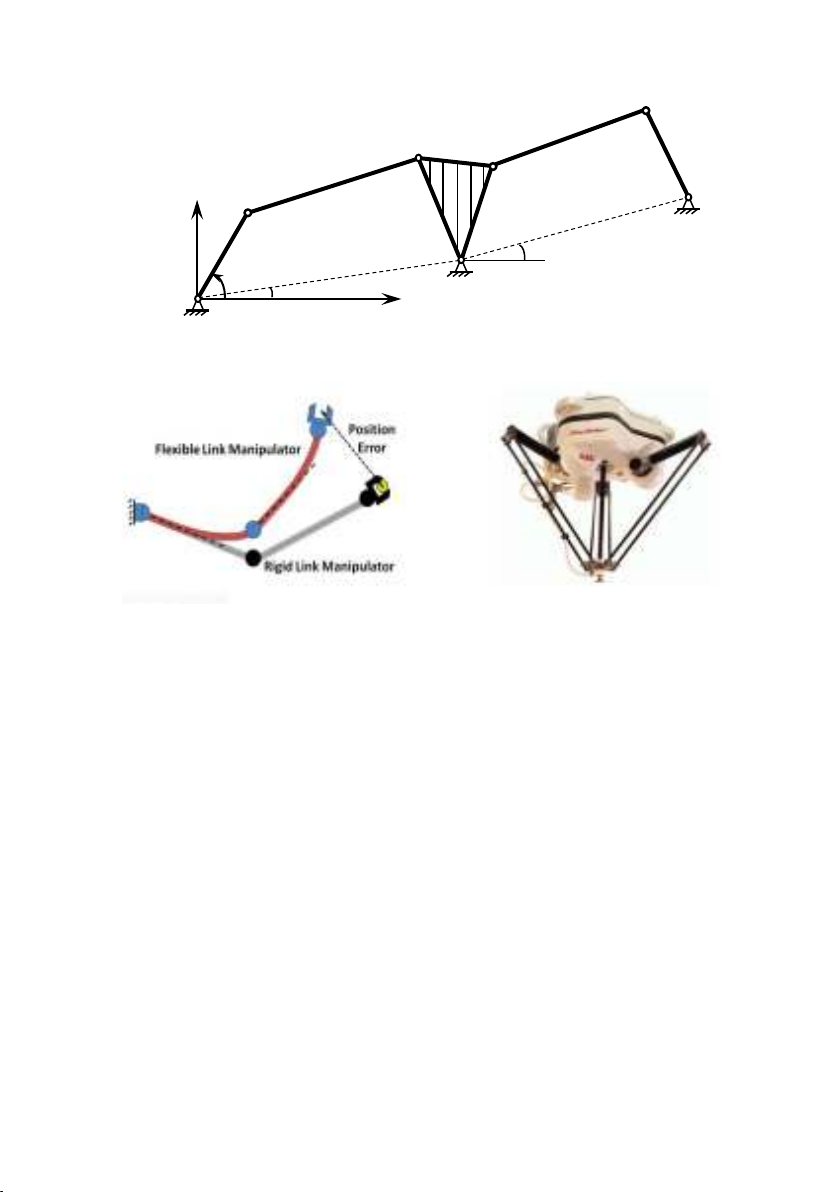
trong Hình 1.5 là sơ đồ của robot song song 3 bậc tự do, trong đó các chân
của robot thường là thanh mảnh nhưng yêu cầu chính xác rất cao, vì vậy việc
xem xét các chân robot như là khâu đàn hồi cũng là cần thiết.