
1
Tiểu luận " Cảm biến "
2
MỤC LỤC
Lời nói đầu ................................................................................................................. 2
I. Cảm biến đo rung .................................................................................................... 3
1. Giới thiệu chung về cảm biến rung.................................................................... 3
2. Các loại cảm biến rung ..................................................................................... 5
3. Ứng dụng của các cảm biến rung ...................................................................... 6
II. Chấn động kế cảm ứng ........................................................................................ 10
1. Sơ đồ cấu tạo của chấn động kế kiểu cảm ứng .............................................. 10
2. Nguyên lí hoạt động ....................................................................................... 11
3. Mốt số ứng dụng của trấn động kế cảm ứng .................................................. 12
III. Cảm biến áp điện đo gia tốc ............................................................................... 12
1. Sơ đồ cấu tạo và nguyên lí hoạt động ........................................................ 15
2. Đặc trưng của cảm biến ................................................................................. 15
3. Một số loại cảm biến áp điện đo gia tốc ........................................................ 17
IV. Cảm biến áp trở đo gia tốc ................................................................................. 18
1. Cấu tạo và nguyên lí hoạt động ...................................................................... 20
2. Cảm biến áp trở kim loại ................................................................................ 21
3. Cảm biến áp trở bán dẫn ................................................................................ 23
4. Một số đặc điểm của cảm biến áp trở ............................................................ 26
5. Cảm biến áp trở đo gia tốc ............................................................................. 27
6. Một số loại cảm biến áp trở đo gia tốc ........................................................... 28
V. Đặc điểm của các cảm biến đo rung và gia tốc .................................................. 29
* Một số hình ảnh các loại cảm biến gia tốc khác tìm được .................................... 30
**Một số ứng dụng của cảm biến đo gia tốc ............................................................ 31
Tài liệu tham khảo ............................................................................................... 37
3
LỜI NÓI ĐẦU
Ngày nay, trong các hệ thống đo lường - điều khiển, mọi quá trình đều được
đặc trưng bởi các biến trạng thái. Các biến trạng thái này thường là các đại lượng
không điện như nhiệt độ, áp suất, lưu lượng, tốc độ, độ di chuyển v.v…
Để thực hiện các quá trình đo lường và điều khiển cần phải thu thập thông tin,
đo đạc, theo dõi sự biến thiên của các biến trạng thái của quá trình thực hiện chức
năng trên là các thiết bị cảm biến.
Cảm biến là các phần tử nhạy cảm dùng để biến đổi các đại lượng đo lường,
kiểm tra hay điều khiển từ dạng này sang dạng khác thuận tiện hơn cho việc tác
động của các phần tử khác. Cảm biến là một thiết bị chịu tác động của đại lượng cần
đo m không có tính chất điện và cho một đặc trưng mang bản chất điện (như điện
tích, điện áp, dòng điện, trở kháng) kí hiệu là s có: s = F(m). Cảm biến thường dùng
ở khâu đo lường và kiểm tra.
Các loại cảm biến được sử dụng rộng rãi trong tự động hóa các quá trình sản
xuất và điều khiển tự động các hệ thống khác nhau. Chúng có chức năng biến đổi sự
thay đổi liên tục các đại lượng đầu vào (đại lượng đo lường - kiểm tra, là các đại
lượng không điện nào đó thành sự thay đổi của các đại lượng đầu ra là đại lượng
điện, ví dụ: điện trở, điện dung, điện kháng, dòng điện, tần số, điện áp rơi, góc pha,...
Căn cứ theo dạng đại lượng đầu vào người ta phân ra các loại cảm biến như:
cảm biến chuyển dịch thẳng, chuyển dịch góc quay, tốc độ, gia tốc, momen quay,
nhiệt độ, áp suất, quang, bức xạ v.v...
Các thiết bị cảm biến đang dần trở thành một phần không thể thiếu trong đời
sống hiện đại của chúng ta. Trong tiểu luận này, chúng tôi chỉ xét đến hai loại cảm
biến khá phổ biến trong các hệ thống đo lường và điều khiển ngày nay, đó là cảm
biến gia tốc và rung. Do kiến thức còn hạn chế và thời gian tìm hiểu chưa được
nhiều nên bài tiểu luận này còn nhiều thiếu xót. Chúng tôi hi vọng sẽ nhận được
nhiều ý kiến từ thầy hướng dẫn và các bạn đọc để bài viết được hoàn thiện hơn.
Chúng tôi xin chân thành cảm ơn!
4
I. CẢM BIẾN ĐO RUNG
1. Giới thiệu chung về cảm biến rung
Đo độ rung trong công nghiệp có tầm quan trọng đặc biệt vì rung động gây
nên tiếng ồn có hại cho sức khỏe, giảm tuổi thọ và năng suất của các thiết bị, làm
mài mòn và gây mỏi cho các chi tiết cơ khí. Vì vậy trong các quy định người ta giới
hạn biên độ rung động cho các thiết bị cụ thể theo tiêu chuẩn quốc gia. Giám sát độ
rung theo thời gian cho phép các kỹ sư nhà máy dự đoán các vấn đề trước khi xảy ra
thiệt hại nghiêm trọng. Độ rung được đặc trưng bởi độ dịch chuyển, tốc độ hoặc gia
tốc tại các điểm nào đó trên thiết bị.
Cấu tạo chung: Cảm biến rung bao gồm một phần tử nhạy cảm (lò xo, tinh thể
áp điện…) nối với một khối lượng rung và được đặt chung trong một vỏ hộp.
Chuyển động rung của khối lượng M tác động lên phần tử nhạy cảm của cảm biến
và được chuyển thành tín hiệu ở đầu ra.
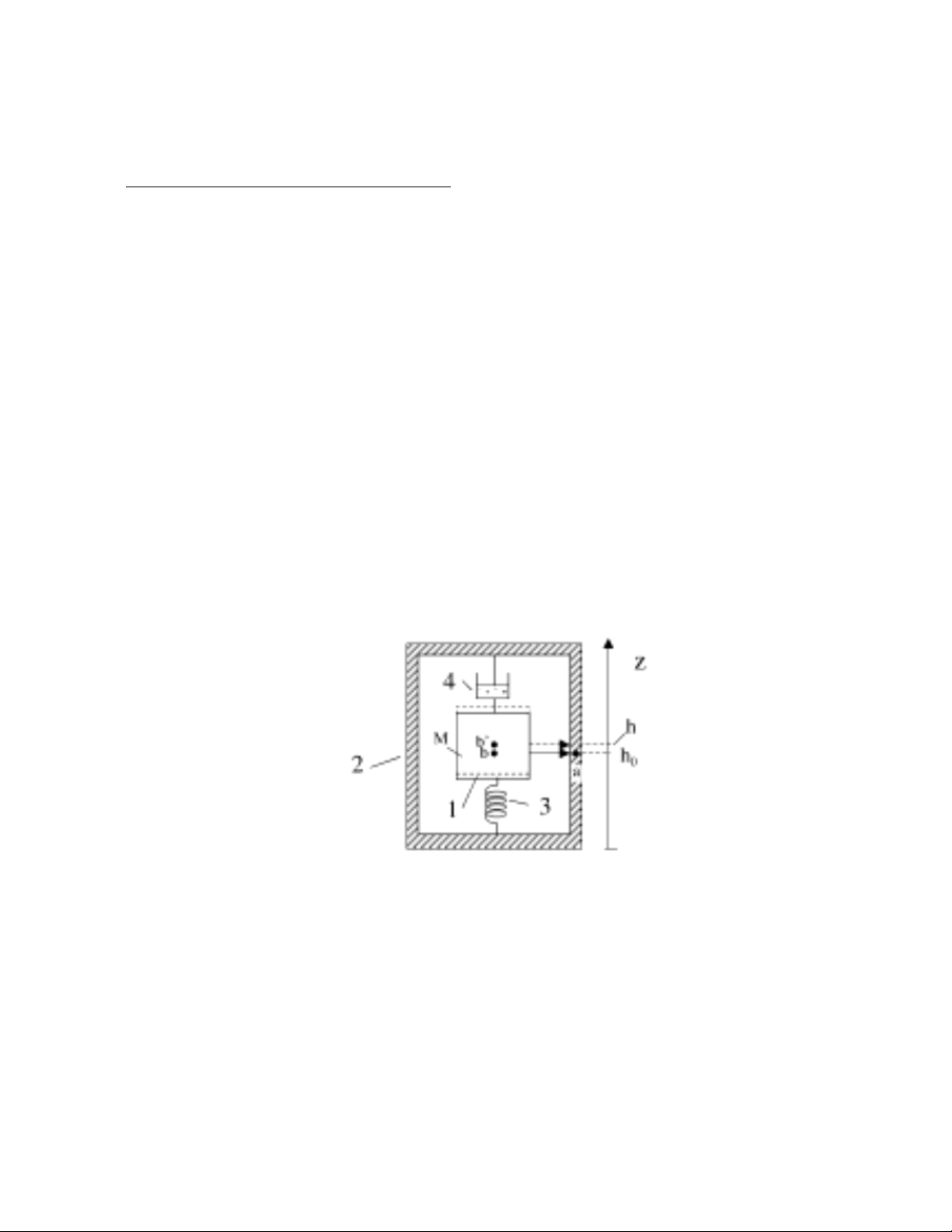
Hình 1: Sơ đồ nguyên lý cảm biến đo gia tốc và rung
1) Khối rung 2) Vỏ hộp 3) Phần tử nhạy cảm 4) Giảm chấn
Gọi ho là tung độ của điểm a của vỏ hộp, h là tung độ điểm b của khối lượng
rung. Khi không có gia tốc tác động lên vỏ hộp, tung độ của a và b bằng nhau.
Dịch chuyển tương đối của khối lượng M so với vỏ hộp xác định bởi biểu thức:
z = h - ho
5
Khi đó phương trình cân bằng lực có dạng:
Cz
dt
dz
F
dt
hd
M
2
2
Cz - Phản lực của lò xo
dt
dz
F - lực ma sát nhớt
2
2
dt
hd
M - Lực đo gia tốc của khối M gây nên.
Hay :
Cz
dt
dz
F
dt
zd
M
dt
hd
M 2
2
2
0
2
Từ công thức trên ta nhận thấy cấu tạo của cảm biến để đo đại lượng sơ cấp
độ dịch chuyển ho, vận tốc dho/dt ( hoặc gia tốc d2ho/dt2 ) phụ thuộc vào đại lượng
được chọn để làm đại lượng đo thứ cấp m2 ( z, dz/dt hoặc d2z/dt2 ) và dải tần số làm
việc. Dải tần số làm việc quyết định số hạng nào trong vế phải phương trình chiếm
ưu thế ( Cz, Fdz/dt hoặc Md2z/dt2 ).
Ở đây ta chỉ xét cảm biến thứ cấp là cảm biến đo vị trí tương đối của khối lượng
rung M so với vỏ hộp.
Quan hệ giữa tần số cộng hưởng của hệ thống cơ và giải tần cần đo thường tỷ
lệ nghịch với nhau. Tần số của cảm biến khi đo độ rung cần thấp hơn một số lần giới
hạn dưới của dải tần cần đo. Khi đo gia tốc tần số của cảm biến cần lớn hơn một số
lần giới hạn trên của dải tần cần đo.
Dải tần đo độ rung nằm trong khoảng 20 ÷ 3000 Hz vì vậy hệ thống cơ cần có
tần số nằm trong khoảng 2 ÷ 7 Hz. Khi đo gia tốc, tần số nằm trong khoảng 10 ÷ 15
Hz.
Tùy theo dải tần, cảm biển rung được cấu tạo khác nhau cho phù hợp.




![Báo cáo thực tập tốt nghiệp Công ty TNHH Cơ điện Samwa Tek: [Mô tả chi tiết hơn về nội dung báo cáo nếu có thể]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250917/trantiendat_ct2/135x160/96461758161119.jpg)
![Báo cáo thực tập tại Garage Car Plus [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250810/nguyenanhquoc2809@gmail.com/135x160/25661754896300.jpg)



![Đồ án tốt nghiệp: Tính toán, kiểm tra hệ thống điều hòa không khí cho tòa nhà Depot Tham Lương [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250717/vijiraiya/135x160/40421752722146.jpg)
















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)