TÍNH TOÁN, THIẾT KẾ, CHẾ TẠO
CÁC MÔĐUN QUAY TRONG ROBOT
Nguyễn Thiện Phúc, Nguyễn Tiến Đức,
Lê Hoàng Giang, Trung tâm NCKT Tự động hoá,
ĐHBK - HN
Tóm tắt:
Môđun quay bao gồm động cơ, bộ phận giảm
tốc và bộ phận phản hồi tín hiệu. Môđun quay, trong
robot nói riêng và trong các thiết bị hiện đại nói
chung, đòi hỏi nhiều tiêu chí như hiệu suất cao và đạt
được tỷ số giảm tốc lớn, chạy êm và triệt tiêu khe hở,
chịu được tải năng và cấu trúc nhỏ gọn. Môđun quay
được đề xuất trong bài này với hộp giảm tốc bánh
răng con lăn mới, đáp ứng xuất sắc các tiêu chí nói
trên
1. GIỚI THIỆU CHUNG
Môđun quay (rotation module) là bộ phận
quan trọng cấu thành robot. Môđun quay có chức năng
tạo ra sự quay của khớp động và quản lý được sự quay
đó. Thông thường môđun quay gồm có: động cơ điện
có thể kèm theo biến tần, hộp giảm tốc và cảm biến
tốc độ quay. Trong đó hộp giảm tốc ảnh hưởng lớn
đến kích cỡ và chất lượng của mođun quay.
2. CÁC YÊU CẦU KỸ THUẬT ĐỐI VỚI MÔĐUN
QUAY
Môđun quay thường phải gắn trực tiếp với
khớp quay của robot. Vì thế yêu cầu đầu tiên đối với
môđun quay là có kích thước nhỏ gọn, trọng lượng
nhẹ, quay rất chậm. Như đã biết trọng lượng và kích
cỡ của môđun quay phụ thuộc vào hộp giảm tốc, nhất
là khi thực hiện với tỷ số truyền rất cao.
Một yêu cầu quan trọng của môđun quay
dùng cho robot là không bị trễ để đảm bẩo điều khiển
được trong thời gian thực. Như đã biết hiện tượng trễ
này chủ yếu là do tồn tại khe hở cạnh răng không
tránh khỏi đối với bộ truyền bánh răng trong hộp giảm
tốc thông thường.
Các yêu cầu kỹ thuật tiếp theo đối với môđun
quay là quán tính thấp, chạy êm, hiệu suất cao và đòi
hỏi bôi trơn không thường xuyên. Hầu hết các yêu cầu
kỹ thuật này lại phụ thuộc vào bộ truyền bánh răng
của hộp giảm tốc.
3. NGUYÊN LÝ HOẠT ĐỘNG CỦA HỘP GIẢM
TỐC BÁNH RĂNG CON LĂN.
Hộp giảm tốc bánh răng con lăn (RL) là loại
hộp giảm tốc hành tinh kiểu mới, rất thích hợp cho
các môđun quay trong robot.
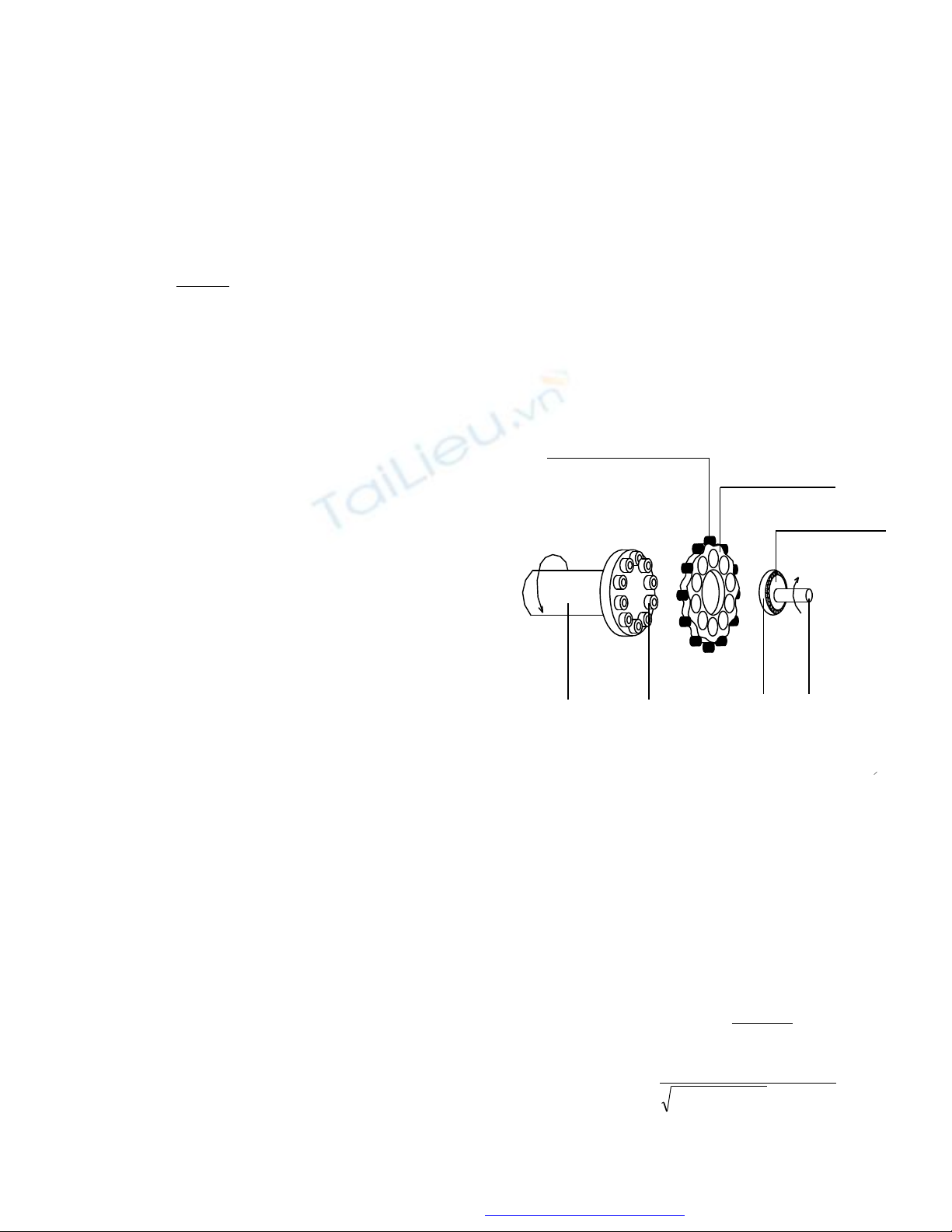
Hộp giảm tốc RL gồm có 4 bộ phận chính:
1) Trục đầu vào có đường tâm nằm lệch so
với tâm ổ bi, tạo nên bánh lệch tâm; 2) Đĩa răng có
vành răng dạng sóng lượn; 3) Vành răng vòng ngoài
cố định gồm các răng chốt con lăn; 4) Trục đầu ra
cùng với các vành các chốt con lăn.
Đĩa răng lắp trên ổ bi lệch tâm sẽ lăn vòng
quanh bên trong vành răng chốt con lăn. Do các răng
của nó vào khớp với các chốt con lăn của vành răng
vòng ngoài cố định cho nên đĩa răng quay ngược
chiều với chiều quay trục đầu vào. Sự quay của đĩa
răng được truyền cho trục đầu ra bằng các chốt con
lăn xuyên qua các lỗ trên đĩa răng.
Hình 1
4. NGUYÊN LÝ TẠO HÌNH DẠNG RĂNG LƯỢN
SÓNG CỦA ĐĨA RĂNG
Biên hình của đĩa răng được xác định từ đặc
điểm ăn khớp sau đây:
Điều kiện để điểm N là điểm tiếp xúc giữa
con lăn và biên hình răng nếu pháp tuyến của nó đi
qua tâm con lăn M và tâm ăn khớp P trong quá trình
ăn khớp máy (ăn khớp khi chế tạo đĩa răng).
Từ điều kiện đó, có thể xác định được toạ
độ của điểm N theo toạ độ của điểm M và điểm P,
như sau [4]:
pM
NM
pMMN yy
yy
xxxx −
−
−−= )( (1)
22 )()(
)(
pMpM
NMc
MN yyxx
yyr
yy −+−
−
−= (2)
Trục ra Chốt con lăn Ổ bi
Trục vào
Bánh lệch tâm
Con lăn vòng ngoài
Đĩa răng
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com

Hình 2
Sau các phép biến đổi, từ (1) và (2) ta nhận
được phương trình đường biên hình răng ở dạng sau:
−−
−
−
=
)sin(Asin
)cos(sin
1
1
1
Z
Z
r
b
r
ZArx
dc
dN
ϕϕ
ϕ
ϕ
(3)
−−
−
−
=
)cos(Acos
)cos(cos
1
1
1
Zn
Z
r
b
r
ZAry
dc
dN
ϕϕ
ϕ
ϕ
(4)
),cos(2
111
2
1
22
1
ϕ
ZAZrZAr
Z
bdd −+= (5)
Hầu hết các ký hiệu dùng trong (1) ÷ (5) đã
được mô tả trên hình 2.
Ngoài ra:
ϕ - góc quay của đĩa răng Z2
Z2 - số răng của đĩa răng
Z1 - số con lăn cố định, Z2 = Z1 - 1
Trên hình 3 là ví dụ một đĩa răng với đường
biên hình răng được chương trình máy tính vẽ ra theo
nguyên lý ăn khớp nói trên và hình 4 là ảnh chụp một
số đĩa răng đã được chế tạo tại Trung tâm NCKT tự
động hoá, ĐHBK - HN dùng cho các môđun quay.
Hình 3
Hình 4
5. PHÂN TÍCH CÁC ĐẶC TÍNH CỦA HỘP GIẢM
TỐC RL THOẢ MÃN CÁC YÊU CẦU KỸ THUẬT
ĐỐI VỚI MÔĐUN QUAY
1. Hộp giảm tốc RL đạt được tỷ số truyền
rất cao. Do đĩa răng có số răng (Z2) ít hơn 1 so với số
răng con lăn (Z1) nên khi trục đầu vào quay được 1
vòng thì đĩa răng mới quay quanh trục tâm của nó
được 1 bước răng. Đĩa răng lại truyền trực tiếp
chuyển động quay sang trục đầu ra nhờ các chốt con
lăn gắn liền với trục đầu ra. Như vậy, truyền động
bánh răng con lăn có thể đạt tỷ số truyền (i) bằng
chính số răng của đĩa răng. Suy từ công thức tính tỷ
số truyền bánh răng hành tinh kiểu lệch tâm, ta có
công thức sau:
12
2
2
1
1
1
ZZ
Z
Z
Z
i−
=
−
= (6)
Vì Z1 = Z2 + 1 ta có i = -Z2 (7)
A
r
e
2
3
r
d
r
c
4
1
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
Dấu trừ chứng tỏ đĩa răng này quay ngược
chiều với trục đầu vào:
Tỷ số truyền thường dùng từ 11 đến 87 đối
với cấp đơn, 10.000 đối với loại kép 2 cấp và cao hơn
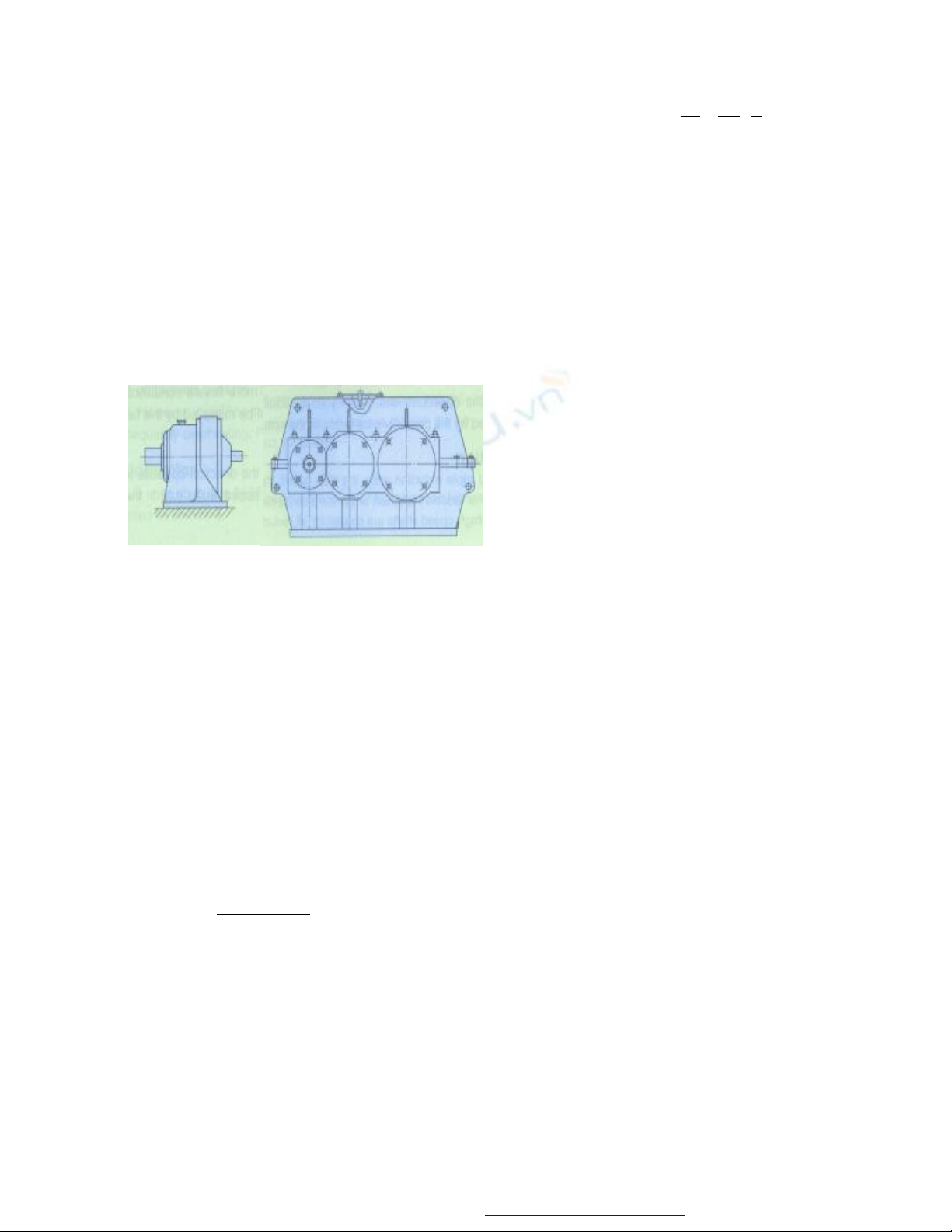
đối với loại kép 3 cấp. Như thấy trên hình 5, kích cỡ
của hộp giảm tốc dùng bánh răng con lăn rút xuống rất
nhiều so với hộp giảm tốc dùng các bánh răng thông
thường khi thực hiện cùng một tỷ số truyền giảm tốc
như nhau. Kích thước giảm đi cũng còn do khả năng
tải của dạng răng mới này cao hơn nhiều như phân
tích ở phần sau. Theo tính toán sơ bộ thì trung bình
kích thước giảm đi hơn một nửa, do đó trọng lượng
cũng giảm theo. Các đặc tính đó là rất phù hợp với các
đòi hỏi của mođun quay trong robot.
Hình 5
2. Hộp giảm tốc RL duy trì được hiệu suất ở
mức cao ngay cả khi tỷ số truyền đạt được rất lớn.
Điều này không thể đạt được đối với hộp giảm tốc
bánh răng hành tinh thông thường. Đó là do trong
truyền động bánh răng kiểu mới này ma sát lăn đã
thay thế cho ma sát trượt tương tự như trong truyền
động vítme bi. Ngoài ra với những quan hệ hình động
học hợp lý ở vùng tiếp xúc giữa răng và con lăn còn
tồn tại màng dầu thuỷ động, nên không những nâng
cao đáng kể khả năng chịu tải mà còn cải thiện về hiệu
suất tăng lên rõ rệt.
Trên cơ sở công thức tính hiệu suất của hệ
thống bánh răng hành tinh kiểu lệch tâm, có thể xây
dựng biểu thức tính hiệu suất của hộp giảm tốc RL
như sau:
η =
1221
1221 )(
η
η
ZZ
ZZ
−
−
(8)
vì Z1 = Z2 + 1, ta có:
η =
1221
12
η
η
ZZ − (9)
Trong đó η12 là hiệu suất của cặp bánh răng
[1]
2
11
1
21
12 ε
πη
−−= ZZ
f (10)
với: ε - hệ số trùng khớp
f - hệ số ma sát
Dựa vào công thức xác định hệ số ma sát
giữa cặp mặt răng có màng dầu bôi trơn [3]
24,013,015,03,0
489,1 −−−− ∑
=RvVVf (11)
trong đó:
V v à VΣ - Vận tốc tương đối và vận tốc
tổng, cm/s
R - bán kính cong tương đương nhỏ nhất,
cm
v
- độ nhớt của dầu bôi trơn, cct.
3. Hộp giảm tốc RL đảm bảo cho môđun
quay không bị trễ khi quay đảo chiều bằng biện pháp
dùng 2 đĩa răng lắp lệch nhau 1800 trên cùng 1 trục
đầu vào để triệt tiêu khe hở cạnh răng.
4. Hộp giảm tốc RL có thể thoả mãn yêu
cầu của môđun quay về chất lượng động lực học. Đó
là do tiếp xúc giữa răng và con lăn là tiếp xúc giữa
cặp mặt lồi - lõm chứa màng dầu thuỷ động. Trong
truyền động bánh răng con lăn thì các thông số như
bán kính cong tương đương, góc giữa đường tiếp xúc
với hướng di chuyển đều rất thuận lợi cho việc hình
thành màng dầu thuỷ động. Vì thế không những làm
tăng khả năng tải lên rất cao mà còn làm giảm tiếng
ồn do tiếp xúc qua lớp dầu. Đồng thời việc dùng 2
đĩa răng lắp đối xứng làm tăng gấp đôi số răng cùng
vào khớp, phân bố ở 2 vùng đối xứng nhau qua trục
quay. Đặc điểm này là tăng khả năng chịu tải của hộp
giảm tốc lên một lần nữa và làm cân bằng ly tâm nên
làm việc êm dịu.
6. KẾT LUẬN
Truyền động bánh răng con lăn có nhiều ưu
điểm nổi trội. Tỷ số truyền đạt được rất cao. Trong
đó ma sát lăn đã thay thế cho ma sát trượt, nên hiệu
suất tăng lên rõ rệt và duy trì ở mức cao, trên 90%.
Con lăn tiếp xúc với răng đĩa răng luôn luôn có màng
dầu thuỷ động. Hai đĩa răng lắp lệch tâm đối xứng
với nhau nên triệt tiêu được khe hở cạnh răng, cân
bằng được lực ly tâm, tăng số răng cùng vào khớp
đến gần một nửa. Vì thế nâng cao đáng kể khả năng
chịu tải, giảm kích thước đi gần một nửa so với hộp
giảm tốc thông thường và tăng cao rõ rệt chất lượng
động lực học khi làm việc. Tất cả những đặc điểm đó
của hộp giảm tốc RL đã đảm bảo các yêu cầu cao của
các môđun quay trong robot. Môđun quay dùng bánh
răng con lăn là một sản phẩm kiểu mới và tỏ ra rất
phù hợp với kỹ thuật robot.
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com

TÀI LIỆU THAM KHẢO
1. Koltrin N.I. Cơ học máy, M.1972 (tiếng Nga)
2. Litvin F.L - Lý thuyết ăn khớp bánh răng, M. 1968
(tiếng Nga)
3. Duxev I. I, Nguyễn Thiện Phúc, Phân tích đặc tính
tiếp xúc cục bộ trên cơ sở lý thuyết bôi trơn thuỷ
động. M, 1977 (tiếng Nga)
4. Nguyen Thien Phuc - Planetary cycloid roller gear
ruducer - Vietnam Journal of Mechanics. N.2 - 2002.
CALCULATION, DESIGNING,
MANUFACTURING OF
ROTARY MEDULES FOR ROBOT
Nguyen Thien Phuc,
Nguyen Tien Duc, Le Hoang Giang,
Research Centre of Automation, Hanoi University of
Technology
The rotary module consists of a motor, a
reducer and position feedback. The rotary modules
for robots and for modenr equipment, in general,
require many criteria such as high transmission
efficiency and high reduction ratio, smooth run and
dispose of backlash, compact structure and heavy
loads. The rotary module with the new roller gear
reducer, proposed in this paper, has satified the
above mentioned criteria.
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com




![Mạch nguyên lý Robot tự hành: [Hướng dẫn chi tiết/Kinh nghiệm thiết kế]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20150620/anhkhoa23/135x160/3551434806006.jpg)



















![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)