
1
Mục lục
Chƣơng I : CÁC THAO TÁC CƠ BẢN KHI LÀM VIỆC VỚI ROBOT ABB ..................... 3
I.CƠ BẢN VỀ ROBOT VÀ PHẦN MỀM LẬP TRÌNH:...................................................... 3
1.TỔNG QUAN VỀ ROBOT: ......................................................................................... 3
2. FLEXPENDANT: ........................................................................................................ 5
3.PHẦN MỀM ROBOTSTUDIO: ................................................................................... 6
4.TỌA ĐỘ TRONG ROBOT: ......................................................................................... 8
II.DI CHUYỂN ROBOT BẰNG FLEXPENDANT(JOGGING): .......................................... 9
III.TẠO TỌA ĐỘ TOOL:...................................................................................................... 16
1.ƢU ĐIỂM VIỆC TẠO TỌA ĐỘ TOOL:.................................................................... 16
2.CÁC BƢỚC THỰC HIỆN TẠO TỌA ĐỘ TOOL: .................................................... 16
IV.TẠO WORKOBJECT: ..................................................................................................... 21
1.ƢU ĐIỂM CỦA VIỆC TẠO WORKOBJECT:.......................................................... 21
2.CÁC BƢỚC TẠO WORKOBJECT: .......................................................................... 21
V. BACKUP AND RESTORE: ............................................................................................ 23
1.CÁC BƢỚC THỰC HIỆN CHỨC NĂNG BACKUP: .............................................. 24
2.CÁC BƢỚC THỰC HIỆN CHỨC NĂNG RESTORE: ............................................. 25
VI.BÀI TẬP THỰC HÀNH: ................................................................................................ 26
Chƣơng II: CÁC TẬP LỆNH LẬP TRÌNH DI CHUYỂN ROBOT ...................................... 31
I.CÁC TẬP LỆNH CƠ BẢN CỦA ROBOT: ....................................................................... 31
II.CÁCH LẬP TRÌNH TRÊN FLEXPENDANT: ................................................................ 37
III. BÀI TẬP THỰC HÀNH: ................................................................................................ 44
Chƣơng III: CHƢƠNG TRÌNH CON VÀ KHỞI TẠO TÍN HIỆU TRONG ROBOT ....... 45
I.CHƢƠNG TRÌNH CON TRONG ROBOT: ....................................................................... 45
1.CƠ BẢN VỀ LỆNH CHƢƠNG TRÌNH TRONG ROBOT: ....................................... 45
2.CÁC BƢỚC TẠO CHƢƠNG TRÌNH CON:............................................................... 46
II.KHỞI TẠO TÍN HIỆU TRONG ROBOT: ......................................................................... 47
1.KHỞI TẠO BUS: .......................................................................................................... 47
2. KHỞI TẠO UNIT: ...................................................................................................... 48
3.KHỞI TẠO TÍN HIỆU (SIGNAL):.............................................................................. 50
2
4.XEM TÍN HIỆU I/O TRÊN FLEXPENDANT: ........................................................ 52
III.BÀI TẬP THỰC HÀNH: ..................................................................................................... 53
Chƣơng IV: LẬP TRÌNH ĐỒ HỌA CHO ROBOT .................................................................... 54

3
Chƣơng I
CÁC THAO TÁC CƠ BẢN KHI LÀM VIỆC VỚI ROBOT ABB
I.CƠ BẢN VỀ ROBOT VÀ PHẦN MỀM LẬP TRÌNH:
1.TỔNG QUAN VỀ ROBOT:
Một hệ thống robot đơn giản gồm một tủ điều khiển kết nối với Robot, mọi hoạt động
robot điều đƣợc điều khiển thông qua tủ điều khiển, tủ điều khiển có thể kết nối với ngƣời sử
dụng qua những phƣơng thức giao tiếp khác nhau.
Một số ƣu điểm của tủ điều khiển Robot ABB:
Phân chia theo chức năng thành các module.
Sự phụ thuộc tối thiểu giữa các module.
Nguồn máy tính riêng với sự quản lý riêng.
Nguồn cấp riêng.
Số cáp tối thiểu giữa các module.
Giải pháp kết nối chuẩn (Ethernet).
Nhờ đó có thể:
Phân phối.
Hỗ trợ nhiều cấu hình khác nhau, nhƣ là MultiMove.
Có thể lắp đặt theo nhiều dạng.
Thay thế và nâng cấp module dễ dàng, độc lập.
Trong các hoạt điều điều khiển Multi move (nhiều Robot cùng hoạt động trên một hệ
thống) thì tủ điều khiển Robot có những đặc điểm nhƣ sau:
Modun điều khiển trung tâm điều khiển các modun khác/ thiết bị quá trình.
Có thể điều khiển tới 4 modun điều khiển truyền động cao 625 mm, đế 700 * 700
mm.
Drive Module có thể điều khiển tới 8,9 trục trong, phụ thuộc vào dòng điện yêu
cầu .

4
Các thành phần trong tủ điều khiển:
Ngƣời dùng có thể điều khiển lập trình robot, truy xuất I/O trong tủ điều khiển bằng các
công cụ chính là FlexPandant và máy tính.
1.Tủ điều khiển chính
2.Ổ nhớ Flash
3.LAN internal connection
4.Công tắc chính 5.Khóa chọn chế độ 6.Đèn tín hiệu an toàn 7.USB
8.Ethernet service Port 9.FlexPendant Hot Plug(Option) 10.I/O kết nối
ngoài 11.Cổng LAN kết nối ngoài
1
2
3
4
5
6
7
8
11
10
9
5
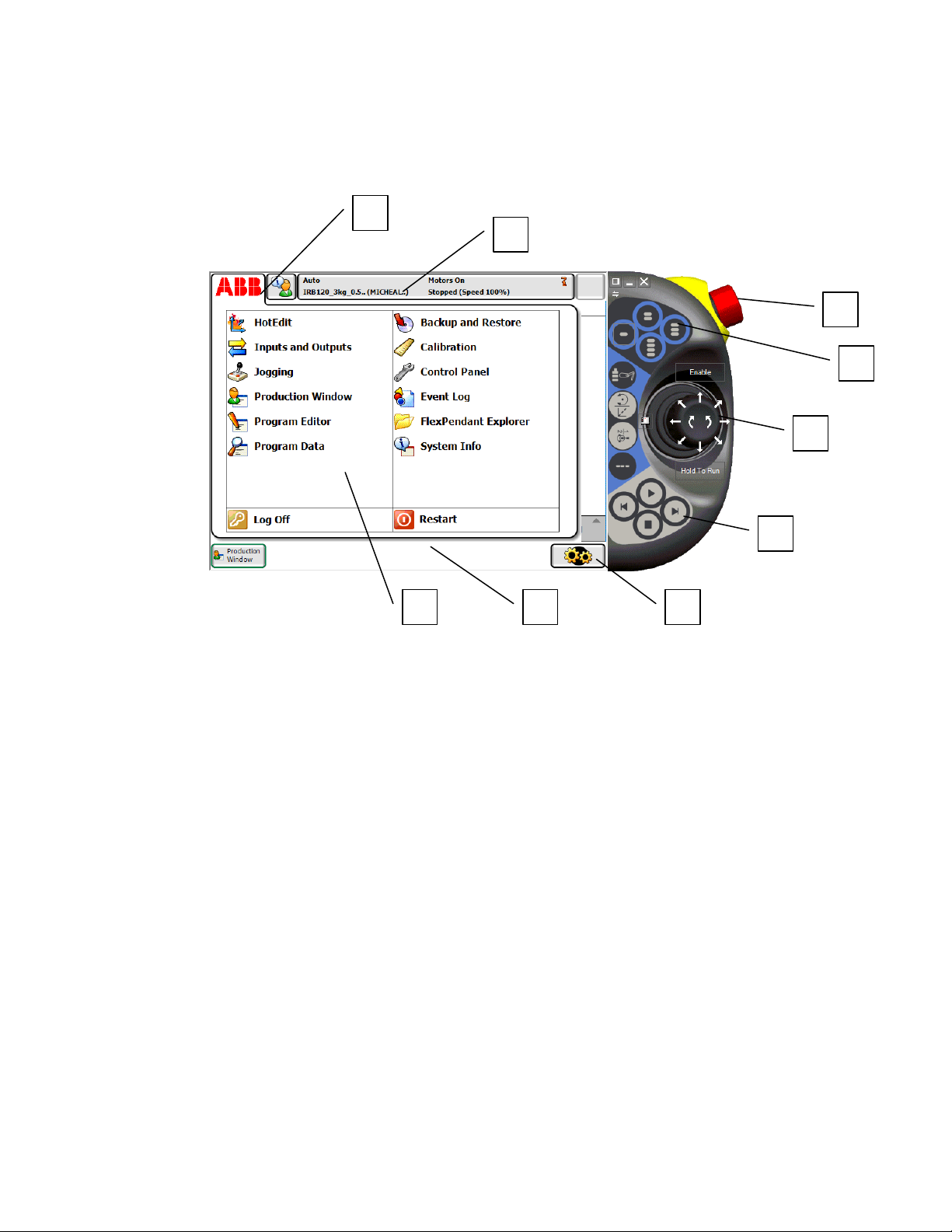
2. FLEXPENDANT:
FlexPendant cho phép ngƣời dùng điều khiển mọi hoạt động robot, lập trình điều khiển
mà không cần thao tác đến máy tính.
Một số ƣu điểm của FlexPendant:
Có thể tạo thêm chƣơng trình ứng dụng riêng với giao diện đồ họa và thông tin
điều khiển .
Công nghệ của Microsoft với các công cụ phát triển mạnh, chuẩn.
Làm việc online và cả offline với Virtual IRC5.
Hệ thống quản lý ngƣời dùng, cho phép truy cập hệ thống với quyền hạn và nhóm
khác nhau .
Hot Plug – Tạo khả năng kết nối hoặc tháo ra trong khi vẫn đang vận hành hệ
thống.
Chống môi trƣờng độc hại – IP54.
Có thể thay cab khi cần.
Màn hình cảm ứng lớn: 7.7 inch, 640 x 480 pixels.
Ngƣời thuận tay trái hay tay phải đều có thể sử dụng.
Đa ngôn ngữ.
1.Màn hình cảm ứng, 2.Dừng khẩn cấp 3.Bốn phím truy xuất nhanh(do ngƣời dùng
chọn), 4.Joystick 3 trục, 5.Bốn phím chạy chƣơng trình(chạy, tới/lùi,dừng chƣơng
trình), 6.ABB danh mục 7.Thanh trạng thái 8.Giao diện cửa sổ, có thể chuyển đổi qua
lại giữa các cửa sổ 9.Truy cập nhanh
1
2
3
4
5
6
7
8
9




![Tài Liệu Kỹ Thuật: [Thêm thông tin chi tiết để tối ưu SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20110929/dohongpro/135x160/machrobot_6244.jpg)



















![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)