
N i dungộ
Ch ng 1: Đi u khi n DC Motor ươ ề ể
1.1 Gi i thi u ho t đ ng DC motor ớ ệ ạ ộ
1.2Đi u khi n h ng chuy n đ ng dùng m ch c u Hề ể ướ ể ộ ạ ầ
1.3 Đi u khi n DC motor dòng nh (1A) dùng L293Bề ể ỏ
1.4 Đi u khi n DC motor dòng l n (2A) dùng L298ề ể ớ
1.5Đi u khi n t c đ DC Motor dùng ch nh đ r ng xung (Pulse Widthề ể ố ộ ỉ ộ ộ
Modulation -PWM)
1.6 Ph n c ng Pulse Width Modulation (PWM)ầ ứ
1.7 Ph n m m Pulse Width Modulation (PWM)ầ ề
Ch ng 2:ươ Dò đ ng tr ng dùng Sensor h ng ngo i (IR) ườ ắ ồ ạ
2.1 các đ c tính c a IR sensorặ ủ
2.2 IR Sensor đi u bi nề ế
Ch ng 3:ươ L p trình Robot t đ ngậ ự ộ
3.1 Ch y theo đ ng tr ngạ ườ ắ
3.2 Dò và đ m nh ng đ ng c t ế ữ ườ ắ
Ch ng 1: Đi u khi n DC Motor ươ ề ể
1.1 Gi i thi u ho t đ ng DC motor ớ ệ ạ ộ
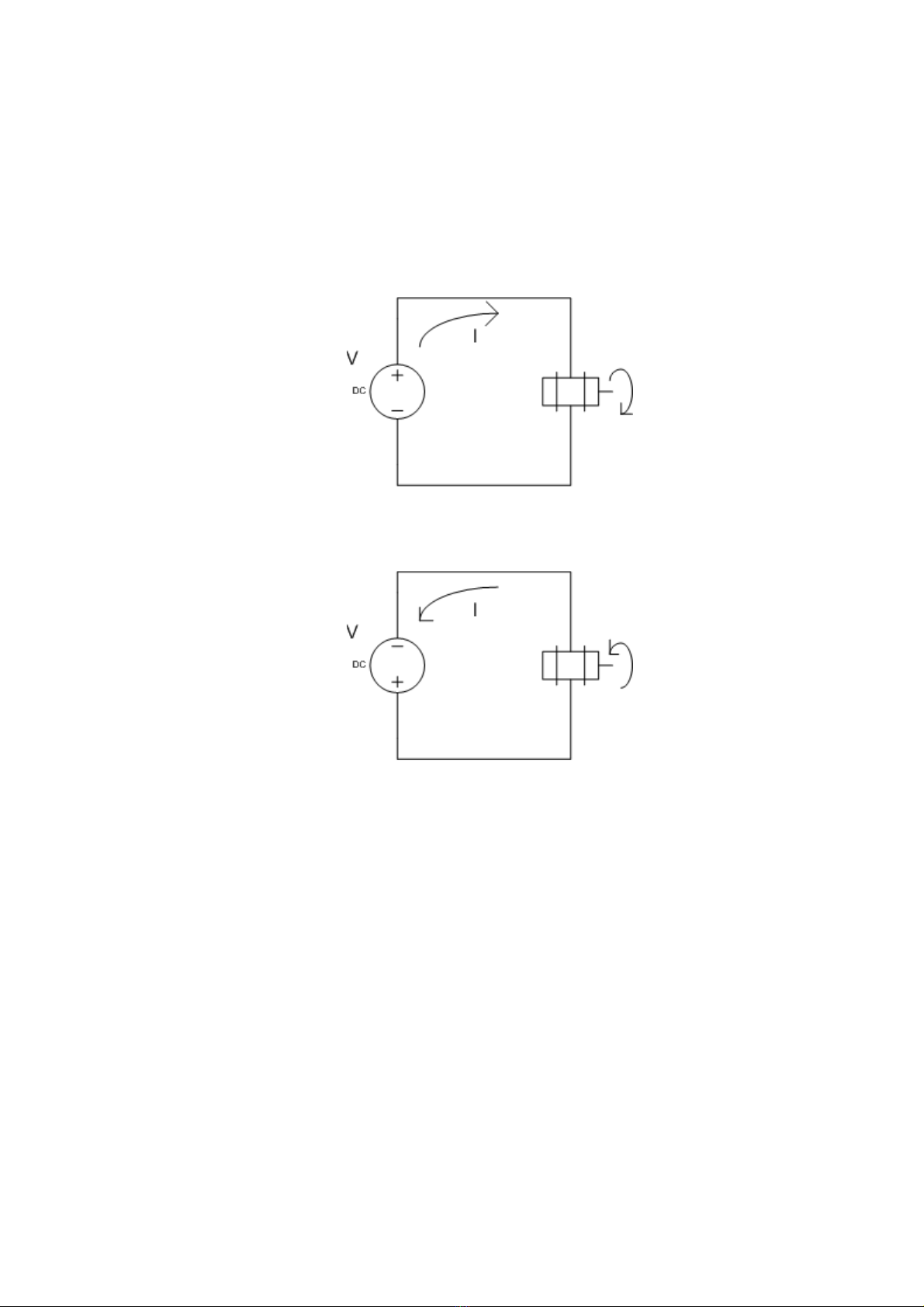
Đ cho motor 1 chi u ho t đ ng, chúng ta c n đ t 1 đi n áp 1 chi u vào motor andể ề ạ ộ ầ ặ ệ ề
1 dòng đi n 1 chi u s ch y qua motor, motor s quay theo 1 chi u nào đó.ệ ề ẽ ạ ẽ ề
N u chúng ta đ i chi u c a đi n áp 1 chi u này, motor s quay ng c l iế ổ ề ủ ệ ề ẽ ượ ạ
Chú ý: đi n áp V và dòng I không nên v t quá giá tr đ c ghi trên motor, n uệ ượ ị ượ ế
không motor s b h ng. Tuy nhiên n u ta đ t 1 đi n áp th p h n V ho c 1 dòngẽ ị ỏ ế ặ ệ ấ ơ ặ
đi n th p h n I, thì t c đ và đ ch u t i c a motor s gi m theo.ệ ấ ơ ố ộ ộ ị ả ủ ẽ ả
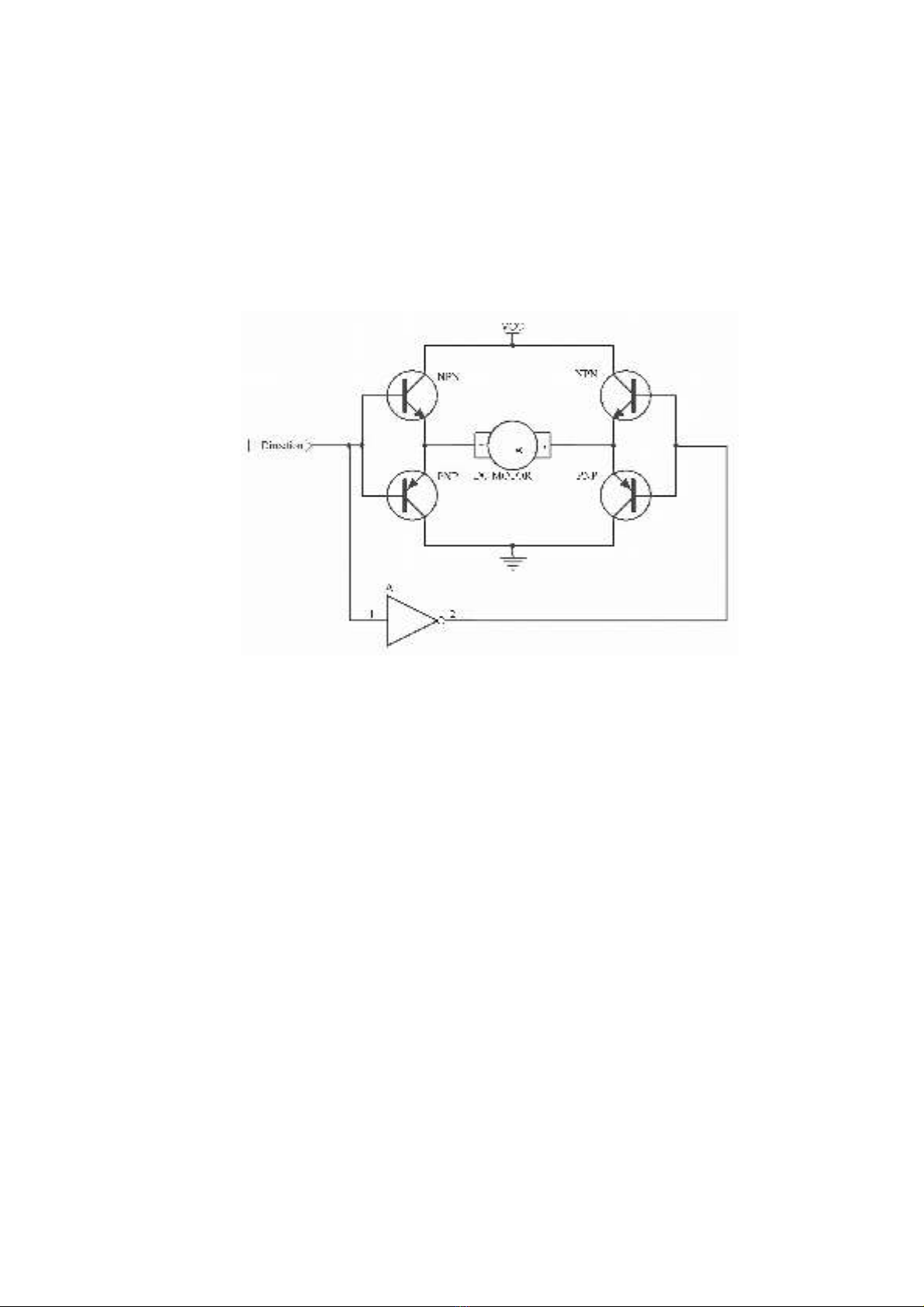
1.2 Đi u khi n h ng chuy n đ ng dùng m ch c u H ề ể ướ ể ộ ạ ầ
Đ đi u khi n h ng quay c a motor 1 chi u, chúng ta c n đ t đi n áp lên motor.ể ề ể ướ ủ ề ầ ặ ệ
Có 1 m ch ph bi n dùng đ đi u khi n motor g i là c u H. Nó đ c g i nhạ ổ ế ể ề ể ọ ầ ượ ọ ư
v y b i vì m ch này trông gi ng hình ch ‘H’. M t trong nh ng kh năng c c hayậ ở ạ ố ữ ộ ữ ả ự
c a m ch này là nó cho phép đi u khi n motor ti n lên ho c lùi l i b t kỳ t c đủ ạ ề ể ế ặ ạ ở ấ ố ộ
nào, ngoài ra nó còn có th dùng 1 ngu n đi n đ c l p [1].ể ồ ệ ộ ậ
Khi đ u vào ‘Direction’ tr ng thái cao thì motor s chuy n sang ch đ h ngầ ở ạ ẽ ể ế ộ ướ
bình th ng. N u đ u vào ‘Direction’ tr ng thái th p thì motor s quay ng cườ ế ầ ở ạ ấ ẽ ượ
chi u.ề
Có r t nhi u lo i IC dùng cho m ch c u H. Lo i ph thông dùng cho motor dòngấ ề ạ ạ ầ ạ ổ
th p là L293B và motor dòng cao là L298.ấ
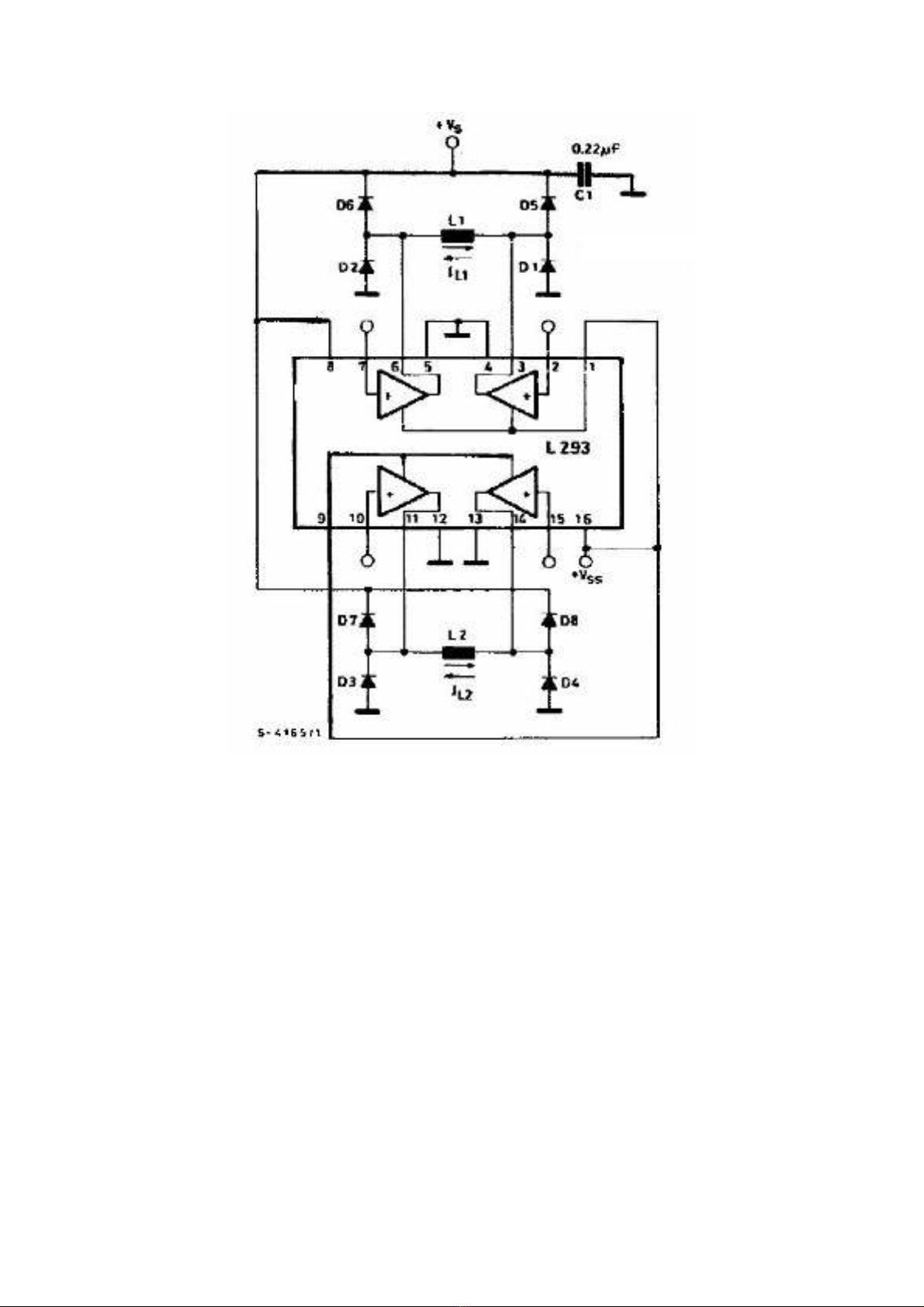
1.3 Đi u khi n DC motor dòng nh (1A) dùng L293Bề ể ỏ
ng d ng đi n hình c a L293B đ c v trên hình d i [2]. Vs là đi n áp đ t vàoỨ ụ ể ủ ượ ẽ ướ ệ ặ
motor và có th lên t i 36V. Dòng l n nh t c a L293B có th lên t i 1A m i kênh.ể ớ ớ ấ ủ ể ớ ỗ
M t IC L293B có th dùng đ đi u khi n 2 motor. Đ u vào 2 và 7 dùng đ đi uộ ể ể ề ể ầ ể ề
khi n motor 1. Đ u 10 và 15 dùng đ đi u khi n motor 2. Diode D1 và D8 t o 1ể ầ ể ề ể ạ
m ch c p. L293B là m t IC ph thông có th mua các c a hàng đi n t (giáạ ặ ộ ổ ể ở ử ệ ử
kho ng 20 ngàn đ ng – tham kh o www.skynet.com.vn)ả ồ ả
Trong các robot t đ ng, chúng tôi s d ng con L293B đ đi u khi n motor r tráiự ộ ử ụ ể ề ể ẽ
và ph i. M ch đ c v trên hình d i đây. ả ạ ượ ẽ ướ
Trong s đ P1.1 và P1.3 là các tín hi u đi u khi n chi u motor t con vi s lýơ ồ ệ ề ể ề ừ ử
87C552. Nh ng tín hi u đi u khi n h ng này đ c t h p AND v i các tín hi uữ ệ ề ể ướ ượ ổ ợ ớ ệ
đi u bi n đ r ng xung PWM0 và PWM1 đ đi u khi n t c đ motor. Chúng tôiề ế ộ ộ ể ề ể ố ộ
s gi i thích vi c đi u khi n này trong m c sau.ẽ ả ệ ề ể ụ
Ngu n motor đ c cung c p vào chân 8 c a con L293B. Đi n áp th c t ph thu cồ ượ ấ ủ ệ ự ế ụ ộ
vào thông s c a motor, th ng t 9V đ n 12V. Robot m u này s d ng đi n ápố ủ ườ ừ ế ẫ ử ụ ệ
12V. Chân 16 đ c n i vào đi n áp 5V logic dùng làm ngu n IC.ượ ố ệ ồ
L1 và L2 tách ngu n nuôi L293B ra kh i h th ng. Chúng ho t đ ng gi ng nhồ ỏ ệ ố ạ ộ ố ư
nh ng b l c các tín hi u nhi u đ c sinh ra b i motor.ữ ộ ọ ệ ễ ượ ở






![Tài Liệu Kỹ Thuật: [Thêm thông tin chi tiết để tối ưu SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20110929/dohongpro/135x160/machrobot_6244.jpg)



















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)