1
BỘ GIÁO DỤC ĐÀO TẠO
ĐẠI HỌC DUY TÂN
––––––––
TẬP THỰC HÀNH
ROBOT CÔNG NGHIỆP
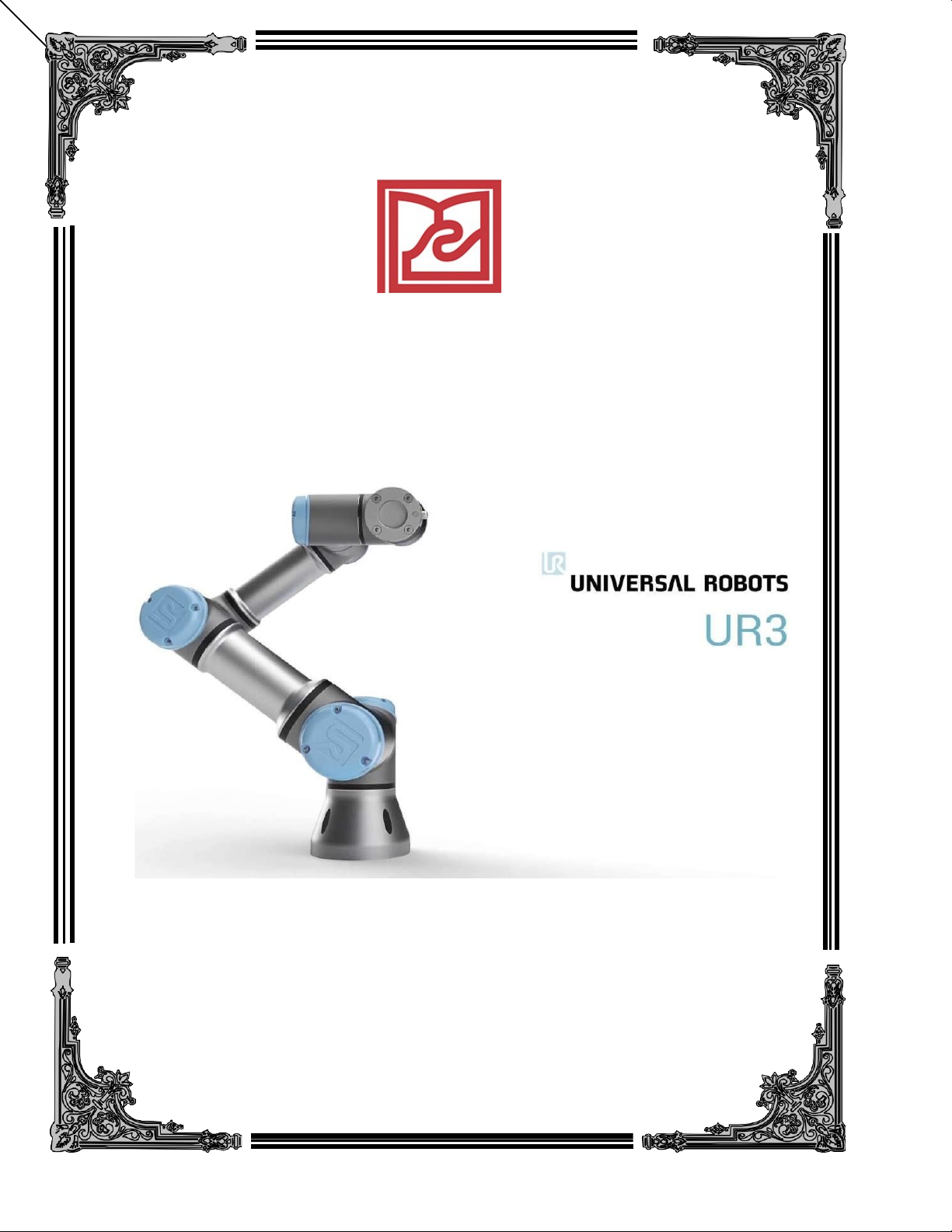
LẬP TRÌNH UNIVERSAL ROBOT UR3
Đà Nẵng, tháng 4 năm 2025

2
GIỚI THIỆU KHÓA THỰC HÀNH
1.1. Mục đích thực hành
-Qui định an toàn khi vào phòng thí nghiệm và khi vận hành robot.
-Ứng dụng của robot công nghiệp Universal Robot UR3 trong thực tế.
-Nắm được đặc tính, thông số kỹ thuật và cách lập trình robot công nghiệp Universal
Robot UR3.
1.2. Qui định về an toàn trong phòng thí nghiệm
-Không được vào phòng thí nghiệm khi có sử dụng của ma túy hoặc rượu/bia.
-Người hướng dẫn phải có mặt trước khi sinh viên có thể vận hành máy trừ khi được
sự cho phép của chuyên gia phòng thí nghiệm.
-Tháo đồng hồ, nhẫn, và những đồ trang sức khác nếu có ra khỏi tay.
-Không được mang áo quần rộng và phải cuốn tay áo dài lên trước khi vận hành
Robot.
-Tóc dài phải được buộc lại hoặc ở vị trí dưới mũ do đó tóc không thể rớt xuống vào
trong Robot khi đang chạy.
-Không được phép mở giày trong bất kì thời gian nào khi đang ở trong phòng thí
nghiệm. Chân phải được bao phủ từ mắt cá trở xuống và tất cả dây phải được buộc
lại gọn gàng để tránh vấp ngã.
-Không được chạm và vươn tới những thiết bị đang di chuyển.
-Đưa robot về trạng thái nghỉ khi kết thúc việc vận hành.
-Không được rời khỏi vị trí khi robot đang hoạt động.
-Không được quấy nhiễu người khác khi đang vận hành Robot.
-Có chổ đứng phù hợp trong suốt thời gian vận hành. Luôn luôn ở khoảng cách an
toàn so với Robot ( ít nhất 1m) khi robot chuyển động.
-Không được vận hành Robot với các hư hại hoặc thiếu bảo hiểm và báo cáo sự hư
hại hoặc thiếu bảo hiểm đó cho Chuyên gia phòng thí nghiệm và người hướng dẫn.
-Có các hành vi lịch sự và chuyên nghiệp trong phóng thí nghiệm.
-Bạn sẽ phải chịu trách nhiệm cho tất cả các chi phí y tế nếu bạn bị tổn thương
trong phòng thí nghiệm.
-Trách nhiệm của sinh viên: Vui lòng đọc, ký tên, ghi ngày vào phiếu kiểm tra vào
và ra phòng thí nghiệm.

3
-
MỤC LỤC
Bài 1: Tổng quan về robot UR..........................................................................................................................6
I. Giới thiệu.....................................................................................................................................................6
II. Thông số kỹ thuật.....................................................................................................................................6
II.1. Robot Universal UR3....................................................................................................................6
II.2. Bộ điều khiển................................................................................................................................10
II.3. Tay dạy lập trình.........................................................................................................................11
III. Lĩnh vực ứng dụng................................................................................................................................11
IV. Cài đặt và mô phỏng robot universal trên máy tính..........................................................................12
Bài 2: Hướng dẫn cài đặt và khởi động robot UR3......................................................................................16
I. Thiết lập robot hướng gá robot...............................................................................................................16
II. Khởi động robot......................................................................................................................................17
III. Hệ tọa độ làm việc của robot................................................................................................................18
III.1. Hệ tọa độ Base............................................................................................................................18
III.2. Hệ tọa độ TCP Tool...................................................................................................................18
III. Di chuyển robot.....................................................................................................................................18
III.1. Di chuyển robot bằng tay..........................................................................................................19
III.2. Di chuyển robot bằng tay dạy lập trình...................................................................................19
IV. Cài đặt các thông số robot....................................................................................................................21
IV.1. Lựa chọn các cài đặt robot đã lưu............................................................................................21
IV.2. Cài đặt password cho robot.......................................................................................................21
IV.3. Calibration màn hình cảm ứng.................................................................................................22
IV.4. Cài đặt địa chỉ IP robot..............................................................................................................22
IV.5. Cài đặt ngày giờ..........................................................................................................................23
V. Đồng bộ dữ liệu giữa máy tính và robot...............................................................................................24
Bài 3: Các lệnh lập trình di chuyển robot cơ bản.........................................................................................25
I. Tạo một chương trình lập trình mới......................................................................................................25
II. Các lệnh di chuyển cơ bản.....................................................................................................................25
III. Viết chương trình di chuyển robot......................................................................................................27
IV. Các lỗi thường gặp khi di chuyển robot..............................................................................................32
IV.1. Lỗi va chạm robot......................................................................................................................32
IV.2. Giới hạn góc xoay của trục robot..............................................................................................33
Bài 4: Thay đổi tốc độ di chuyển của robot...................................................................................................35
I. Thay đổi tốc độ di chuyển tối đa của robot............................................................................................35
II. Giới hạn tốc độ di chuyển tối đa của từng trục robot.........................................................................35

4
III. Thay đổi tốc độ di chuyển toàn bộ câu lệnh trong chương trình......................................................36
IV. Thay đổi tốc độ di chuyển theo từng lệnh Move trong chương trình...............................................36
V. Thay đổi tốc độ di chuyển theo từng điểm trong chương trình..........................................................37
Bài 5: Khai báo I/O, khai báo biến và các lệnh điều kiện............................................................................38
I. Khai báo I/O robot...................................................................................................................................38
I.1. Sơ đồ kết nối I/O robot.................................................................................................................38
I.2. chế độ bảo vệ bằng cổng Input.....................................................................................................38
I.3. Cài đặt I/O robot trong chương trình.........................................................................................39
II. Khai báo biến dữ liệu..............................................................................................................................41
II.1. Kiểu biến.......................................................................................................................................41
II.2. Khai báo biến...............................................................................................................................41
III. Các lệnh điều kiện Wait, If, Loop, Case..............................................................................................45
III.1. Lệnh Wait...................................................................................................................................45
III.2. Lệnh If.........................................................................................................................................45
III.3. Lệnh Loop...................................................................................................................................46
III.4. Lệnh Switch................................................................................................................................46
III.5. Các lệnh khác.............................................................................................................................47
III.6. Các nút nhấn thao tác................................................................................................................49
IV. Viết chương trình di chuyển robot kèm điều kiện (cảm biến, Start, Stop..)....................................49
Bài 6: Kết hợp tín hiệu I/O trong di chuyển robot.......................................................................................53
I. Lệnh Set.....................................................................................................................................................53
II. Viết chương trình robot kẹp vật từ A và thả vào vị trí B....................................................................54
III. Viết chương trình robot kẹp vật từ A và thả vào vị trí B dựa vào cảm biến...................................57
Bài 7: Chương trình con trong robot.............................................................................................................60
I. Tạo chương trình con...............................................................................................................................60
II. Gọi chương trình con..............................................................................................................................61
III. Viết chương trình robot dùng chương trình con................................................................................61
Bài 8: Tạo mặt phẳng làm việc mới...............................................................................................................63
I. Tạo mặt phẳng mới..................................................................................................................................63
II. Tạo mặt phẳng an toàn cho robot.........................................................................................................65
III. Thay đổi mặt phẳng làm việc của robot..............................................................................................67
Bài 9: Thực hành lập trình trạm lắp ráp vòng bi sử dụng Robot UR3......................................................70
Bài 10: Truyền thông Internet IP...................................................................................................................97
Bài 11: Chương trình quét mảng...................................................................................................................98

5
Bài 1: Tổng quan về robot UR
I. Giới thiệu
Robot UR3 là robot cho các tác vụ lắp ráp nhẹ và các chương trình làm việc tự động. Robot nhỏ
gọn chỉ nặng 11 kg, nhưng trọng tải là 3 kg, xoay 360 độ trên tất cả các khớp cổ tay và vòng quay vô
hạn trên khớp nối. Những tính năng độc đáo này làm cho UR3 trở thành robot có tính linh hoạt, nhẹ và
hợp tác nhất để làm việc cùng. Đó là sự lựa chọn lý tưởng cho các ứng dụng đòi hỏi khả năng 6 trục,
nơi kích thước, an toàn và chi phí rất quan trọng.
Robot UR3 là một trợ lý tối ưu trong các ứng dụng lắp ráp, đánh bóng, keo và vít đòi hỏi chất
lượng sản phẩm đồng nhất. Robot bảng mới này cũng có thể được sử dụng trong một trạm làm việc
riêng biệt được gắn trên bàn, nhặt, lắp ráp và đặt các bộ phận trong dòng sản phẩm tối ưu. Do dạng gọn
và lập trình dễ dàng, nên dễ dàng chuyển đổi nó giữa các nhiệm vụ để đáp ứng nhu cầu sản xuất nhanh
nhẹn, làm cho tổng chi phí sở hữu thấp và thời gian hoàn vốn cực kỳ nhanh.
Các ứng dụng robot UR3 rộng rãi trong các ngành sản xuất từ các thiết bị y tế tới các bo mạch điện
tử và các linh kiện điện tử.
II. Thông số kỹ thuật
II.1. Robot Universal UR3
Hiệu suất:
- Sai số lặp lại: +/-0.1mm
- Nhiệt độ làm việc: 0-500C
- Công suất: 90-250W
- Khả năng vận hành: tích hợp 15 chức năng an toàn tiên tiến trên robot có thể điều chỉnh được
Thông số kỹ thuật:
- Tải trọng tối đa: 3kg
- Tấm với: 500mm
- Số trục: 6 trục






![Công nghệ Robot Trông Công Nghiệp Nguyễn Trung Hòa phần 9: [Thêm mô tả hấp dẫn về nội dung]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20110415/dauhukhothom/135x160/robotcongnghiep_pdf0089_0272.jpg)
![Công Nghệ Robot Trồng Công Nghiệp Nguyễn Trung Hòa (Phần 8): [Thêm Mô Tả Chi Tiết Hoặc Lợi Ích Nổi Bật]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20110415/dauhukhothom/135x160/robotcongnghiep_pdf0078_1466.jpg)
![Công Nghệ Robot Trồng Công Nghiệp Nguyễn Trung Hòa phần 7: [Thêm mô tả hấp dẫn, đánh đúng insight người dùng]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20110415/dauhukhothom/135x160/robotcongnghiep_pdf0067_802.jpg)














![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)