
http://www.ebook.edu.vn 1
CHƯƠNG I
TỔNG QUAN VỀ ROBOT
1.1 Sơ lược quá trình phát triển
Thuật ngữ robot được sinh ra từ trên sân khấu, không phải trong phân
xưởng sản xuất. Những robot xuất hiện lần đầu tiên trên ở trên NewYork vào ngày
09/10/1922 trong vở “Rossum’s Universal Robot” của nhà soạn kịch người Tiệp
Karen Kapek viết năm 1921, còn từ robot là cách gọi tắt của từ robota - theo tiếng
Tiệp có nghĩa là công việc lao dịch.
Những robot thực sự có ích được nghiên cứu để đưa vào những ứng dụng
trong công nghiệp thực sự lại là những tay máy. Vào năm 1948, nhà nghiên cứu
Goertz đã nghiên cứu chế tạo loại tay máy đôi điều khiển từ xa đầu tiên, và cùng
năm đó hãng General Mills chế tạo tay máy gần tương tự sử dụng cơ cấu tác động
là những động cơ điện kết hợp với các cử hành trình. Đến năm 1954, Goertz tiếp
tục chế tạo một dạng tay máy đôi sử dụng động cơ servo và có thể nhận biết lực tác
động lên khâu cuối. Sử dụng những thành quả đó, vào năm 1956 hãng General
Mills cho ra đời tay máy hoạt động trong công việc khảo sát đáy biển.
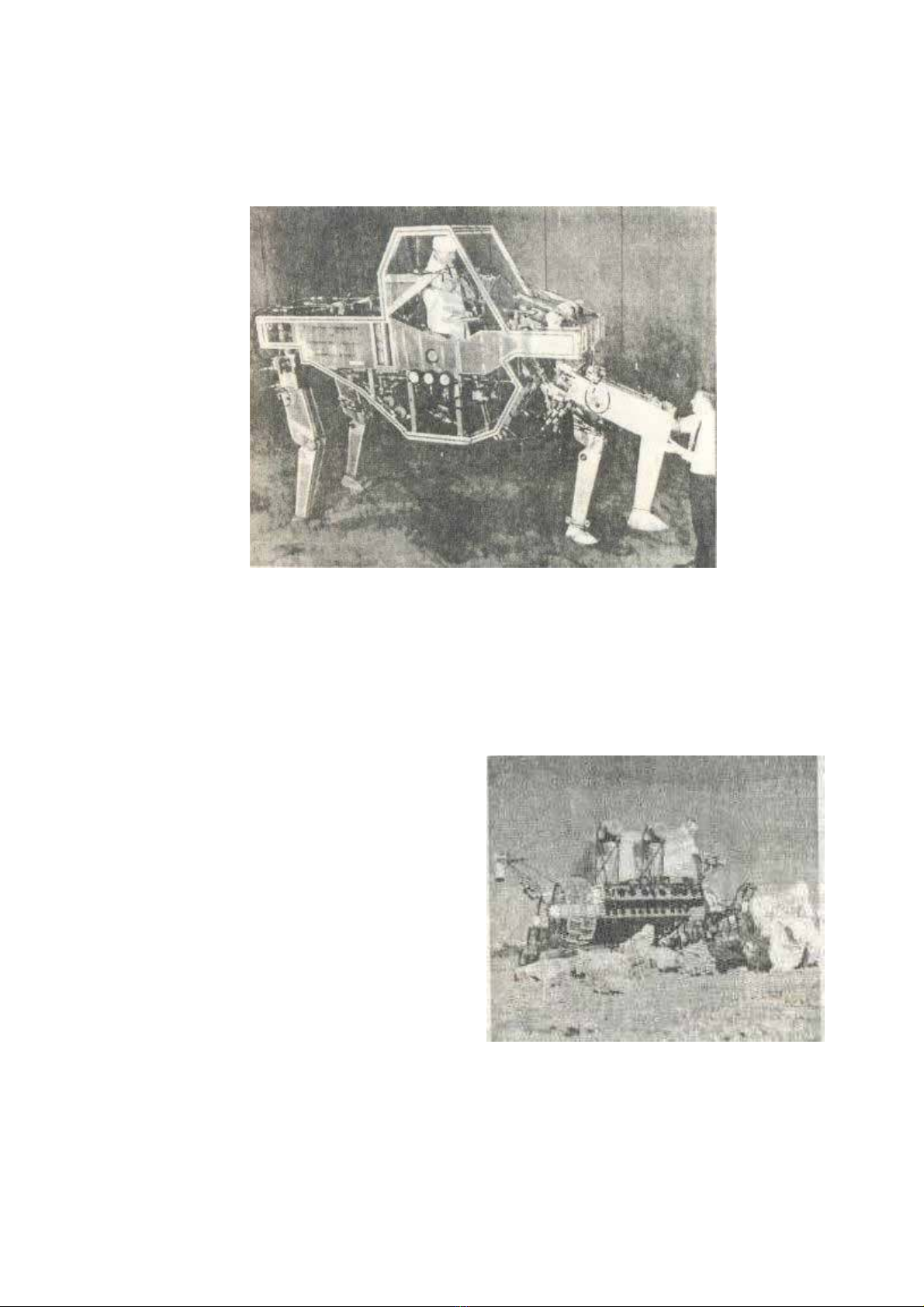
Năm 1968 R.S. Mosher, thuộc hãng General Electric, đã chế tạo một thiết bị
biết đi có bốn chân, có chiều dài hơn 3m, nặng 1.400kg, sử dụng động cơ đốt trong
có công suất gắn 100 mã lực (hình 1.1);
http://www.ebook.edu.vn
2
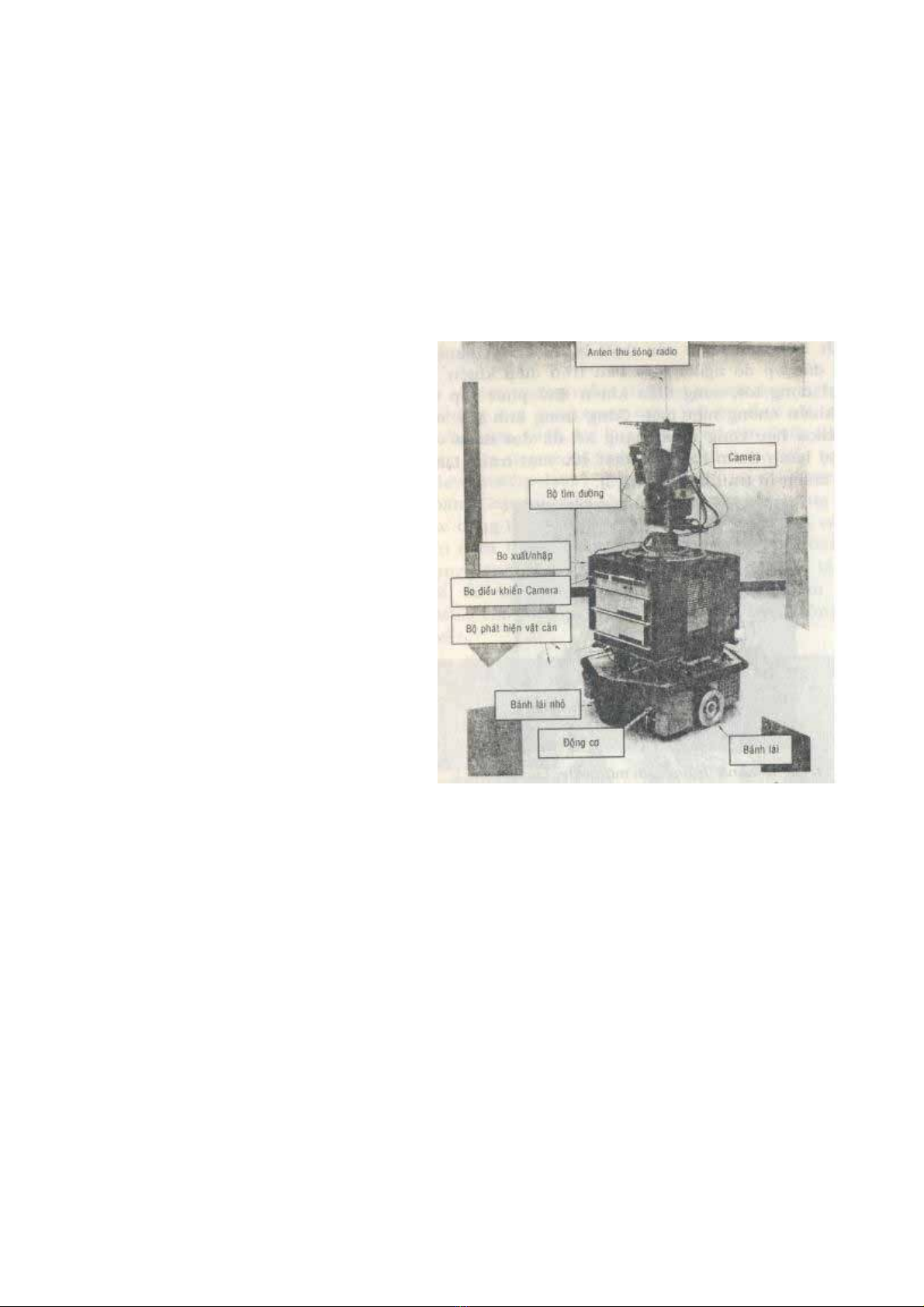
Hình 1.2 Xe tự hành thám hiểm mặt trăng
Lunokohod 1
Cũng trong lĩnh vực này, một thành tựu khoa học công nghệ đáng kể đã đạt được
vào năm 1970 là xe tự hành thám hiểm bề mặt của mặt trăng Lunokohod 1 được
điều khiển từ trái đất (hình 1.2).
Hình 1.1 Robot 4 chân của hãng R.S Mosher
và hãng General Electric
http://www.ebook.edu.vn
3
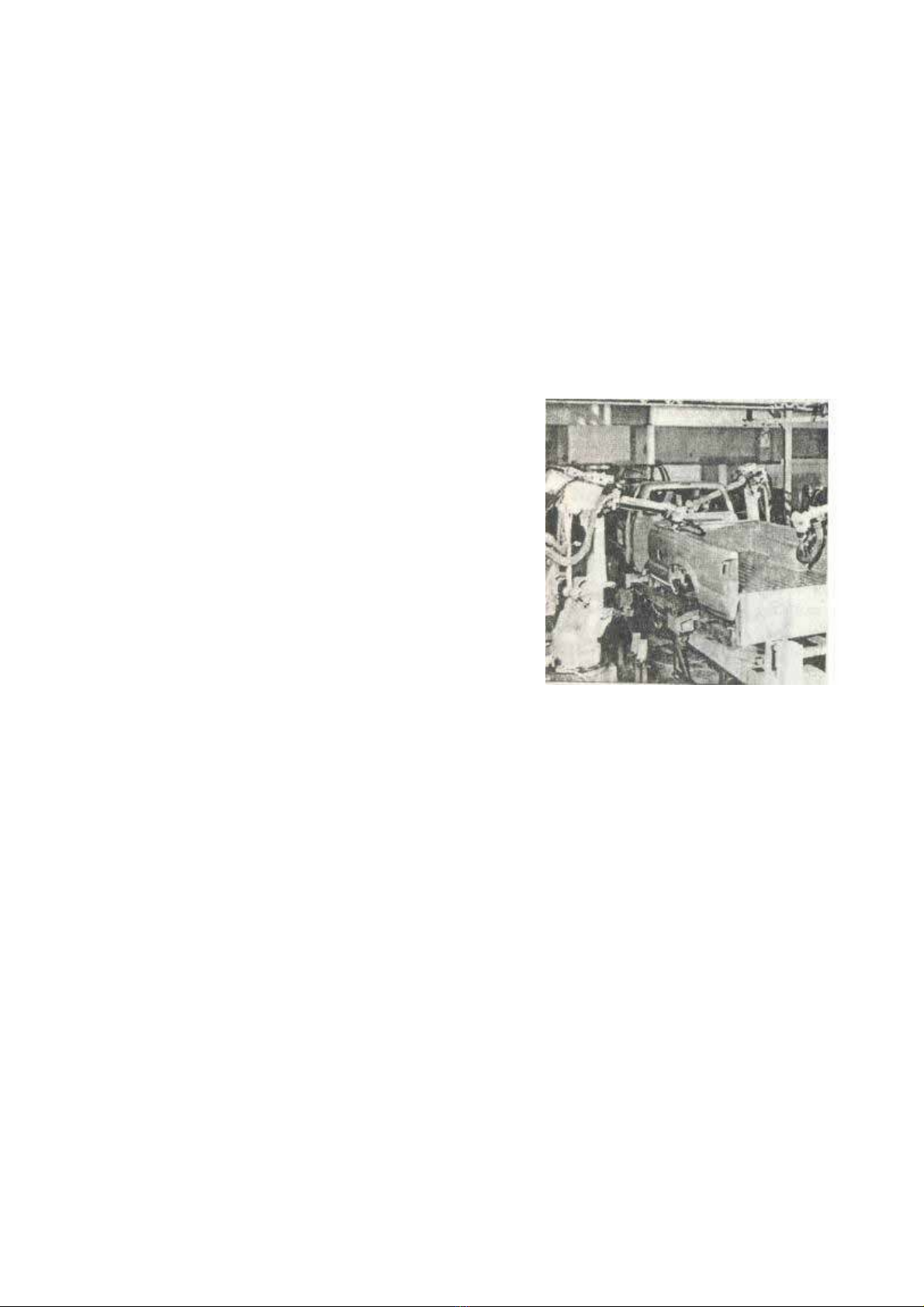
Viện nghiên cứu thuộc Trường Đại học Stanford vào năm 1969 đã thiết kế robot
Shakey di động tinh vi hơn để thực hiện những thí nghiệm về điều khiển sử dụng
hệ thống thu nhận hình ảnh để nhận dạng đối tượng (hình 1.3). Robot này được lập
trình trước để nhận dạng đối tượng bằng camera, xác định đường đi đến đối tượng
và thực hiện một số tác động trên đối tượng.
Hình 1.3- Robot Shakey-robot đầu tiên
nhận dạng đối tượng bằng camera
Năm 1952 máy điều khiển
chương trình số đầu tiên ra đời tại
Học Viện Công nghệ
Massachusetts (Hoa Kỳ). Trên cơ
sở đó năm 1954, George Devol đã
thiết kế robot lập trình với điều khiển chương trình số đầu tiên nhờ một thiết bị do
ông phát minh được gọi là thiết bị chuyển khớp được lập trình. Joseph Engelberger,
người mà ngày nay thường được gọi là cha đẻ của robot công nghiệp, đã thành lập
hãng Unimation sau khi mua bản quyền thiết bị của Devol và sau đó đã phát triển
những thế hệ robot điều khiển theo chương trình. Năm 1962, robot Unmation đầu
tiên được đưa vào sử dụng tại hãng General Motors; và năm 1976 cánh tay robot
đầu tiên trong không gian đã được sử dụng trên tàu thám hiểm Viking của cơ quan
Không Gian NASA của Hoa Kỳ để lấy mẫu đất trên sao Hoả (hình 1.4).

http://www.ebook.edu.vn
4
Hình 1.4- Tay robot trên tàu thám hiểm Viking 1 .
Trong hoạt động sản xuất, đa số
những robot công nghiệp có hình dạng của
“cánh tay cơ khí”, cũng chính vì vậy mà đôi
khi ta gặp thuật ngữ người máy - tay máy
trong những tài liệu tham khảo và giáo trình
về robot.
Trên hình 1.5 trình bày một robot là
một cánh tay cơ khí khác xa với robot
R2D2, nhưng đối với sản xuất nó mang lại
lợi ích to lớn.
Hình 1.5- Robot lập trình được đầu tiên do
George Dovol thiết kế.
I.2. Những ứng dụng điển hình của robot.
Robot được ứng dụng rộng rãi trong nhiều ngành công nghiệp. Những ứng
dụng ban đầu bao gồm gắp đặt vật liệu, hàn điểm và phun sơn.
Một trong những công việc kém năng suất nhất của con người là rèn kim loại
ở nhiệt độ cao. Các công việc này đòi hỏi công nhân di chuyển phôi có khối lượng
lớn với nhiệt độ cao khắp nơi trong xưởng. Việc tuyển dụng công nhân làm việc
trong môi trường nhiệt độ cao như vậy là một vấn đề khó khăn đối với ngành công
nghiệp này, và robot ban đầu đã được sử dụng để thay thế công nhân làm việc trong
http://www.ebook.edu.vn
5
điều kiện môi trường ngặt nghèo như trong lò đúc, xưởng rèn, và xưởng hàn. Đối
với robot thì nhiệt độ cao lại không đáng sợ.
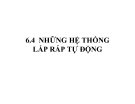
Trong các nhà máy sản xuất xe hơi thì hàn điểm là công việc sử dụng robot
nhiều nhất: khung xe được cố định vào một xe được điều khiển từ xa di chuyển
khắp nhà máy. Khi xe đến trạm hàn, kẹp sẽ cố định các chi tiết đúng vào vị trí cần
hàn, trong khi đó robot di chuyển dọc theo các điểm hàn được lập trình trước (hình
1.6, fanucrobotics.com).
Hình 1.6 - Robot hàm điểm trong nhà máy sản xuất
xe hơi .
Sơn là một công việc nặng nhọc và độc
hại đối với sức khoẻ của con người, nhưng lại
hoàn toàn không nguy hiểm đối với robot.
Ngoài ra, con người phải mất hơn hai năm để
nắm được kỹ thuật và kỹ năng trở thành một
thợ sơn lành nghề trong khi robot có thể học được tất cả kiến thức đó chỉ trong vài
giờ và có khả năng lặp lại một cách chính xác các động tác sơn phức tạp. Điều đó
thể hiện một bước tiến đáng kể trong việc kết hợp giữa năng suất và chất lượng
cũng như cải thiện chế độ làm việc cho con người trong môi trường độc hại. Tất cả
robot phun sơn đều được ‘dạy’ bởi một thợ sơn chuyên nghiệp giữ đầu phun và
dịch chuyển nó đi đúng đường; đường đi đó được ghi lại; và khi robot thực hiện
công việc phun sơn thì nó chỉ việc đi theo đường đi đã được định sẵn đó. Như thế,
robot phun sơn phải có các khớp sao cho người thợ sơn có thể dễ dàng dẫn hướng
cho chúng. Ứng dụng này đưa đến sự phát triển một loại tay robot dạng ‘vòi voi’ có
độ linh hoạt cao.
Robot còn được sử dụng trong nhiều lĩnh vực khác nữa như phục vụ cho máy
công cụ, làm khuôn trong công nghiệp đồ nhựa, gắn kính xe hơi, gắp hàng ra khỏi






![Công nghệ Robot Trông Công Nghiệp Nguyễn Trung Hòa phần 9: [Thêm mô tả hấp dẫn về nội dung]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20110415/dauhukhothom/135x160/robotcongnghiep_pdf0089_0272.jpg)
![Công Nghệ Robot Trồng Công Nghiệp Nguyễn Trung Hòa (Phần 8): [Thêm Mô Tả Chi Tiết Hoặc Lợi Ích Nổi Bật]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20110415/dauhukhothom/135x160/robotcongnghiep_pdf0078_1466.jpg)
![Công Nghệ Robot Trồng Công Nghiệp Nguyễn Trung Hòa phần 7: [Thêm mô tả hấp dẫn, đánh đúng insight người dùng]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20110415/dauhukhothom/135x160/robotcongnghiep_pdf0067_802.jpg)





![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)