Robot c«ng nghiÖp 88
=⎡
⎣
⎢
⎢
⎤
⎦
⎥
⎥
== ∑∑
Tr T
qqr T
qqr
i
j
j
ii
T
k
k
iT
k
i
j
i∂
∂
∂
∂
&.&
11
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=∑∑
==
i
j
kj
k
T
i
Tii
j
i
i
k
qq
q
T
rr
q
T
Tr
11
.&&
∂
∂
∂
∂
(7.13)
7. 5. 2. TÝnh ®éng n¨ng cña vi khèi l−îng dm.
Ký hiÖu Ki lµ ®éng n¨ng cña kh©u thø i. dKi lµ ®éng n¨ng cña vi khèi l−îng dm ®Æt
t¹i vÞ trÝ ir trªn kh©u thø i.
dK Tr T
qrr T
qqq
ik
ii
j
iiT i
T
k
jk
j
i
=⎡
⎣
⎢
⎢
⎤
⎦
⎥
⎥
== ∑∑
1
211
∂
∂
∂
∂
.&& dm
=⎡
⎣
⎢
⎢
⎤
⎦
⎥
⎥
== ∑∑
1
211
Tr T
qrdm r T
qqq
k
ii
j
iiT
i
T
k
jk
j
i∂
∂
∂
∂
(. . ). && (7.14)
Vµ do ®ã ®éng n¨ng cña kh©u thø i sÏ lµ :
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
== ∑∫
∑
∫==
i
j
kj
k
T
i
Khau
Tii
j
i
i
k
iqq
q
T
dmrr
q
T
TrdKK
1i
1
)..(
2
1&&
∂
∂
∂
∂
i Khau
(7.15)
§Æt gäi lµ ma trËn gi¶ qu¸n tÝnh (Pseudo inertia matrix).
∫
=
i
Tii rr.
Khau
idmJ
ý nghÜa "gi¶ qu¸n tÝnh" ®−îc sö dông v× khi thiÕt lËp ®Çy ®ñ c¸c phÇn tö cña ma trËn Ji ta
cã thÓ liªn hÖ víi c¸c kh¸i niÖm "m«men qu¸n tÝnh ®éc cùc" vµ tr×nh bµy c¸c phÇn tö cña Ji
gièng nh− c¸c phÇn tö cña m«men qu¸n tÝnh ®éc cùc. Ta xÐt mèi quan hÖ nÇy nh− sau :
Theo ®Þnh nghÜa ta cã :
= J
∫
=
i
Tii rr.
Khau
idmJ i = (7.16)
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
∫∫∫∫ ∫∫∫∫ ∫∫∫∫ ∫∫∫∫
dmzdmydmxdm
zdmdmzzdmyzdmx
ydmzdmydmyydmx
xdmzdmxydmxdmx
iii
iiiiii
iiiiii
iiiiii
2
2
2
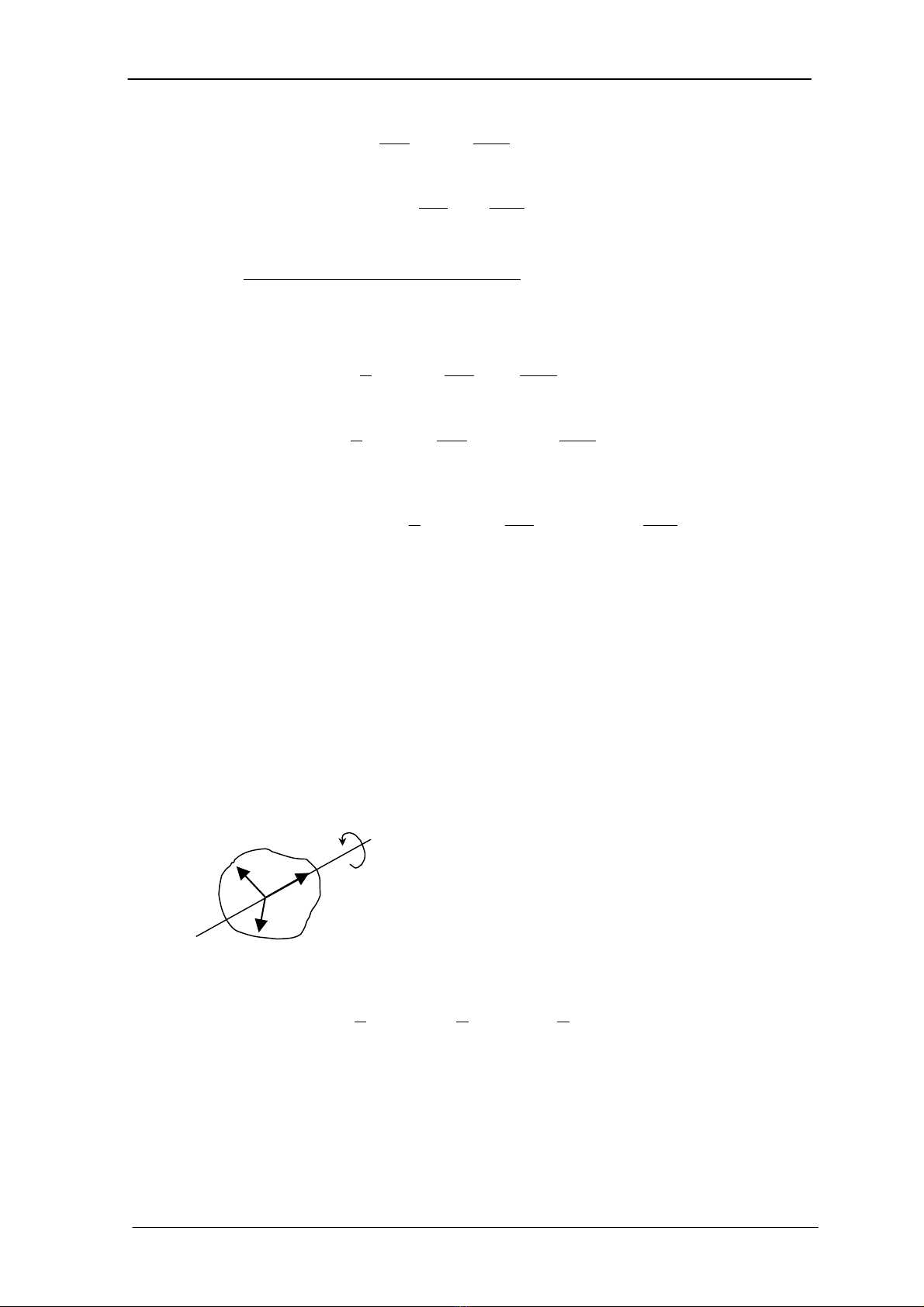
B©y giê ta nh¾c l¹i m«men qu¸n tÝnh ®éc cùc cña
mét vËt thÓ bÊt kú nh− h×nh vÏ.
z
y x ω Theo ®Þnh nghÜa ta cã :
∫+= dmzy
xx )(I 22
∫+= dmzx
yy )I 22
∫+= dmyx
zz )(I 22
H
×nh 7.2 : M«men qu¸n tÝnh ®éc cùc
Vµ v× : )(
2
1
)(
2
1
)(
2
1
x2222222 yxzxzy +++++−=
VËy : ; .v.v… 2/)I I I( zzyyxx
2++−=
∫dmx
Ngoµi ra ta cßn cã :
; ;
∫
=xydm
xy
I∫
=yzdm
yz
I∫
=xzdm
xz
I
; ;
∫
=xdmmx ∫
=ydmmy ∫
=zdmmz
TS. Ph¹m §¨ng Ph−íc
Robot c«ng nghiÖp 89
§èi chiÕu víi ma trËn gi¶ qu¸n tÝnh Ji, ta cã thÓ tr×nh bµy Ji nh− sau :
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−+
+−
++−
=
mmzmymx
mz
2
III
II
myI
2
III
I
mxII
2
III
j
zzyyxx
yzyz
zy
zzyyxx
xy
zxyx
zzyyxx
i (7.17)
Nh− vËy ý nghÜa biÓu tr−ng cña Ji ®· râ.
VËy ta cã : ⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
=∑∑
==
i
j
kj
k
T
i
i
j
i
i
k
iqq
q
T
J
q
T
TrK
11
2
1&&
∂
∂
∂
∂
(7.18)
Cuèi cïng, §éng n¨ng cña mét robot cã n kh©u ®−îc tÝnh :
(7.19)
∑
=
=n
i
i
KK
1
7. 5. 3. TÝnh thÕ n¨ng cña robot :
ThÕ n¨ng cña kh©u i cã khèi l−îng mi, träng t©m ®−îc x¸c ®Þnh bëi vect¬ ri (vect¬
biÓu diÔn träng t©m cña kh©u i trong hÖ to¹ ®é c¬ b¶n) lµ :
Pi = -mi. g. ri = -mi. g. Ti iri (7.20)
Trong ®ã, vect¬ gia tèc träng tr−êng g ®−îc biÓu diÔn d−íi d¹ng mét ma trËn cét :
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−
=
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
0
8,9
0
0
0
z
y
x
g
g
g
g
ThÕ n¨ng cña toµn c¬ cÊu robot n kh©u ®éng sÏ lµ :
∑
=
−= n
i
i
i
ii rgTmP
1
(7.21)
7. 5.4. Hµm Lagrange :
Sau khi x¸c ®Þnh ®éng n¨ng vµ thÕ n¨ng cña toµn c¬ cÊu, ta cã hµm Lagrange cña
robot cã n bËc tù do :
∑∑∑∑ ====
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
∂
∂
=n
i
i
i
iikj
n
i
i
j
i
kk
T
i
i
j
irgTmqq
q
T
J
q
T
TraceL
1111 2
1
2
1&& (7.22)
Chóng ta chó ý r»ng, trong hµm Lagrange vÉn ch−a ®Ò cËp ®Õn ¶nh h−ëng cña
nguån truyÒn ®éng (gåm c¸c phÇn tÜnh (stator) vµ phÇn ®éng (Rotor) cña ®éng c¬ ®iÖn).
7. 5. 5. Ph−¬ng tr×nh ®éng lùc häc robot :
Ta ®· biÕt lùc tæng qu¸t ®Æt lªn kh©u thø i cña robot cã n kh©u (Ph−¬ng tr×nh
Lagrange - Euler) :
Fi=−
d
dt
L
q
L
q
ii
∂
∂
∂
∂
& (7.23)
Sau khi thiÕt lËp hµm Lagrange, víi p = 1... n, ta tÝnh ®−îc :
TS. Ph¹m §¨ng Ph−íc
Robot c«ng nghiÖp 90
(p lµ chØ sè lÇn l−ît lÊy theo j vµ k)
j
n
i
i
jp
T
i
i
j
i
k
n
i
i
kk
T
i
i
p
i
p
q
q
T
J
q
T
Trq
q
T
J
q
T
Tr
q
L&&
&∑∑∑∑ ==== ⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
∂
∂
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
∂
∂
=
∂
∂
1111 2
1
2
1 (7.24)
Thay ®æi chØ sè gi¶ j thµnh k trong sè h¹ng thø hai ,vµ ®Ó ý r»ng :
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
∂
∂
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
∂
∂
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
∂
∂
j
T
i
i
p
i
T
p
T
i
i
j
i
p
T
i
i
j
i
q
T
J
q
T
Tr
q
T
J
q
T
Tr
q
T
J
q
T
Tr (7.25)
ta cã : k
n
i
i
kp
T
i
i
k
i
p
q
q
T
J
q
T
Tr
q
L&
&∑∑
== ⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
∂
∂
=
∂
∂
11
(7.26)
Còng ®Ó ý r»ng : trong Ti(q1, q2, . . . , qi), víi qi lµ c¸c biÕn khíp cña i khíp ®Çu tiªn. Do
vËy, nÕu i < p th× 0=
∂
∂
p
i
q
T.
Cuèi cïng ta cã : k
n
pi
i
kp
T
i
i
k
i
p
q
q
T
J
q
T
Tr
q
L&
&∑∑
== ⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
∂
∂
=
∂
∂
1
(7.27)
LÊy vi ph©n theo thêi gian t cña ph−¬ng tr×nh trªn :
k
n
pi
i
kp
T
i
i
k
i
p
q
q
T
J
q
T
Tr
dt
d
q
L
dt
d&
&
1
∑∑
== ⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
∂
∂
=
∂
∂
+
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
∂
∂
∂∂
∂
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
∂
∂
=∑∑∑∑∑ =====
mqq
q
T
J
qq
T
Trq
q
T
J
q
T
Tr k
n
pi
i
k
i
mp
T
i
i
mk
i
k
n
pi
i
kp
T
i
i
k
i&&&&
11
2
1
mqq
q
T
J
qq
T
Tr k
n
pi
i
k
i
mk
T
i
i
mp
i&&
∑∑∑
=== ⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
∂
∂
∂∂
∂
+
11
2
(7.28)
(BiÕn ®æi theo chó ý (7.25))
Sè h¹ng cuèi cña ph−¬ng tr×nh Lagrange Euler lµ :
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
∂∂
∂
=
∂
∂∑∑∑
===
k
n
pi
i
j
i
kk
T
i
i
pj
i
p
qq
q
T
J
qq
T
Tr
q
L&& j
11
2
2
1
i
i
n
pi p
i
ik
n
i
i
j
j
i
kj
T
i
i
pk
ir
q
T
gmqq
q
T
J
qq
T
Tr ∑∑∑∑ ==== ∂
∂
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
∂∂
∂
+&&
111
2
2
1 (7.29)
Cuèi cïng ta cã lùc tæng qu¸t cña kh©u p :
pp
pq
L
q
L
dt
d
F
∂
∂
∂
∂
−= &
Thay thÕ c¸c chØ sè p vµ i thµnh i vµ j, ta sÏ cã :
j
j
n
ij i
j
jk
n
ij
j
k
j
mi
T
j
j
mk
j
k
n
ij
j
ki
T
j
j
k
j
ir
q
T
gmmqq
q
T
J
qq
T
Trq
q
T
J
q
T
TrF ∑∑∑∑∑∑ ====== ∂
∂
−
⎥
⎦
⎤
⎢
⎣
⎡
∂
∂
∂∂
∂
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
∂
∂
=&&&&
11
2
1
(7.30)
Víi mét robot cã n bËc tù do th× :
TS. Ph¹m §¨ng Ph−íc

Robot c«ng nghiÖp 91
q = [q
1, q2, . . . ,qn]T
q=
&
[
]
n21 q , ... ,q ,q &&& T
vµ F = F[F1, F2, . . . , Fn]T
§Ó cho gän, ta biÓu diÔn :
)(),()( qGqqqCqq
J
F
+
+
=&&&& (7.31)
Trong ®ã :
J thÓ hiÖn t¸c dông cña qu¸n tÝnh, lµ mét ma trËn ®èi xøng (n x n);
C thÓ hiÖn t¸c dông cña lùc ly t©m vµ Cariolis, lµ mét vect¬ (n x 1);
G thÓ hiÖn t¸c dông cña lùc träng tr−êng, còng lµ mét vect¬ (n x 1).
§©y lµ ph−¬ng tr×nh ®éng lùc häc cña robot.
NÕu thªm vµo ph−¬ng tr×nh trªn c¸c t¸c dông kh¸c nh− : FEX ®Æc tr−ng cho c¸c
ngo¹i lùc t¸c dông lªn trôc, V ®Æc tr−ng cho hiÖu øng ma s¸t, ta cã :
EX
FqVqGqqqCqqJF
+
+
+
+= )()(),()( &&&&& (7.32)
TS. Ph¹m §¨ng Ph−íc
robot c«ng nghiÖp 99
Ch−¬ng 9
TruyÒn ®éng vµ ®iÒu khiÓn robot.
9.1. TruyÒn ®éng ®iÖn trong robot:
TruyÒn ®éng ®iÖn ®−îc dïng kh¸ nhiÒu trong kü thuËt robot, v× cã nhiÒu
−u ®iÓm nh− lµ ®iÒu khiÓn ®¬n gi¶n kh«ng ph¶i dïng c¸c bé biÕn ®æi phô, kh«ng
g©y bÈn m«i tr−êng, c¸c lo¹i ®éng c¬ ®iÖn hiÖn ®¹i cã thÓ l¾p trùc tiÕp trªn c¸c
khíp quay...
Tuy nhiªn so víi truyÒn ®éng thuû lùc hoÆc thuû khÝ th× truyÒn ®éng ®iÖn
cã c«ng suÊt thÊp vµ th«ng th−êng ph¶i cÇn thªm hép gi¶m tèc v× th−êng c¸c
kh©u cña robot chuyÓn ®éng víi tèc ®é thÊp.
Trong kü thuËt robot, vÒ nguyªn t¾c cã thÓ dïng ®éng c¬ ®iÖn c¸c lo¹i
kh¸c nhau, nh−ng trong thùc tÕ chØ cã hai lo¹i ®−îc dïng nhiÒu h¬n c¶. §ã lµ
®éng c¬ ®iÖn mét chiÒu vµ ®éng c¬ b−íc.
Ngµy nay, do nh÷ng thµnh tùu míi trong nghiªn cøu ®iÒu khiÓn ®éng c¬
®iÖn xoay chiÒu, nªn còng cã xu h−íng chuyÓn sang sö dông ®éng c¬ ®iÖn xoay
chiÒu ®Ó tr¸nh ph¶i trang bÞ thªm bé nguån ®iÖn mét chiÒu. Ngoµi ra, lo¹i ®éng
c¬ ®iÖn mét chiÒu kh«ng chæi gãp (DC brushless motor) còng b¾t ®Çu ®−îc øng
dông vµo kü thuËt robot.
9.1.1. §éng c¬ ®iÖn mét chiÒu :
§éng c¬ ®iÖn mét chiÒu gåm cã hai phÇn :
+ Stato cè ®Þnh víi c¸c cuén d©y cã dßng ®iÖn c¶m hoÆc dïng nam ch©m
vÜnh c÷u. PhÇn nÇy cßn ®−îc gäi lµ phÇn c¶m. PhÇn c¶m t¹o nªn tõ th«ng trong
khe hë kh«ng khÝ.
+ Roto víi c¸c thanh dÉn. Khi cã dßng ®iÖn mét chiÒu ch¹y qua vµ víi
dßng tõ th«ng x¸c ®Þnh, roto sÏ quay. PhÇn nÇy gäi lµ phÇn øng.
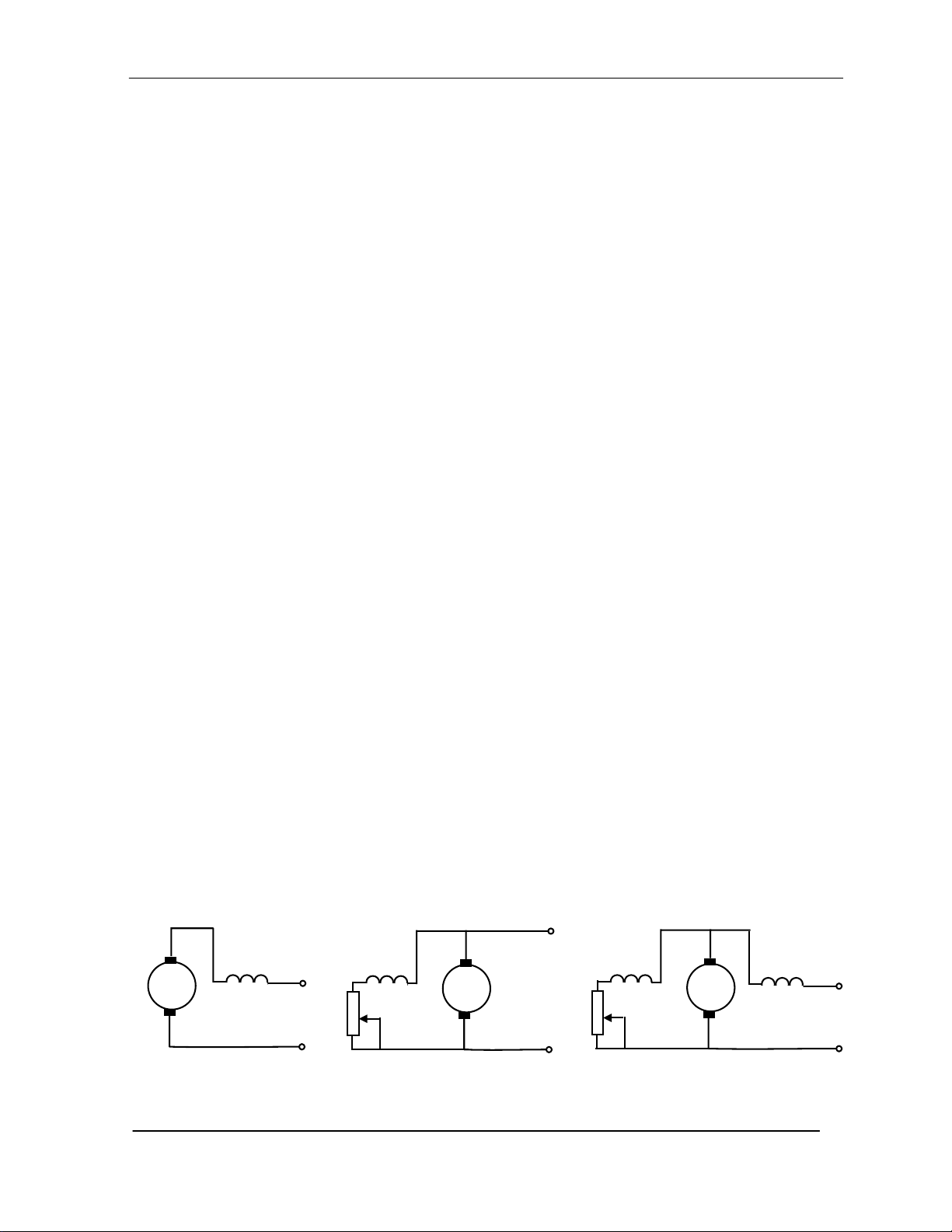
Tuú c¸ch ®Êu d©y gi÷a phÇn c¶m so víi phÇn øng, ta cã nh÷ng lo¹i ®éng
c¬ ®iÖn mét chiÒu kh¸c nhau :
+ §éng c¬ kÝch tõ nèi tiÕp (H×nh 9.1.a);
+ §éng c¬ kÝch tõ song song (H×nh 9.1.b);
+ §éng c¬ kÝch tõ hæn hîp (H×nh 9.1.c).
a
/
b/
c
/
H×nh 9.1. C¸c lo¹i ®éng c¬ ®iÖn mét chiÒu.
TS. Ph¹m §¨ng Ph−íc







![Công Nghệ Robot Trồng Công Nghiệp Nguyễn Trung Hòa (Phần 8): [Thêm Mô Tả Chi Tiết Hoặc Lợi Ích Nổi Bật]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20110415/dauhukhothom/135x160/robotcongnghiep_pdf0078_1466.jpg)
![Công Nghệ Robot Trồng Công Nghiệp Nguyễn Trung Hòa phần 7: [Thêm mô tả hấp dẫn, đánh đúng insight người dùng]](https://cdn.tailieu.vn/images/document/thumbnail/2011/20110415/dauhukhothom/135x160/robotcongnghiep_pdf0067_802.jpg)
















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)