Phòng thí nghiệm Tự động hoá – Vi điều khiển Tài liệu thí nghiệm Vi điều khiển
Trang 1
TỔNG QUAN VỀ KIT THÍ NGHIỆM VI
ĐIỀU KHIỂN μP8951
I. KIT KTCT_μp8951:
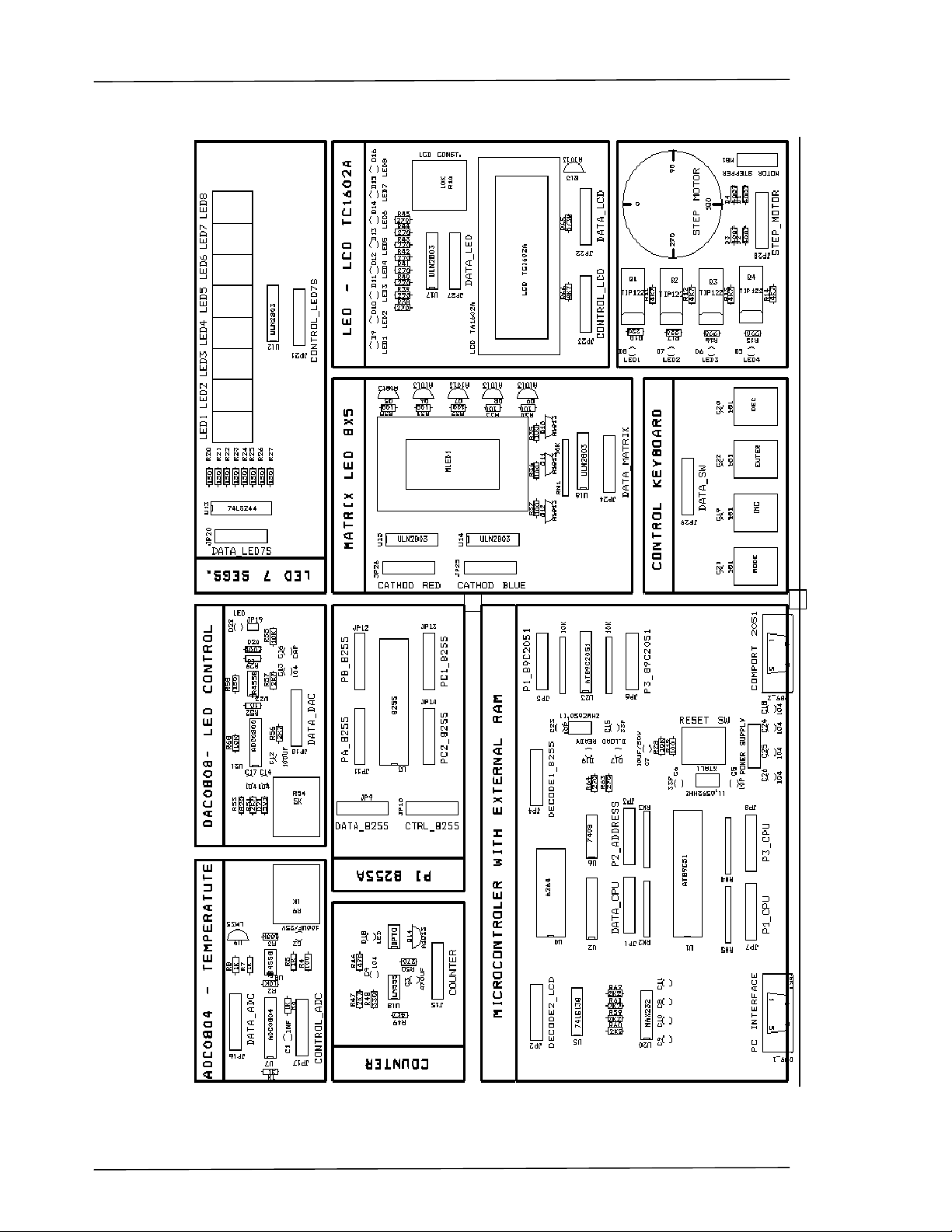
KIT thí nghiệm gồm 10 module được bố trí như trên hình 1.
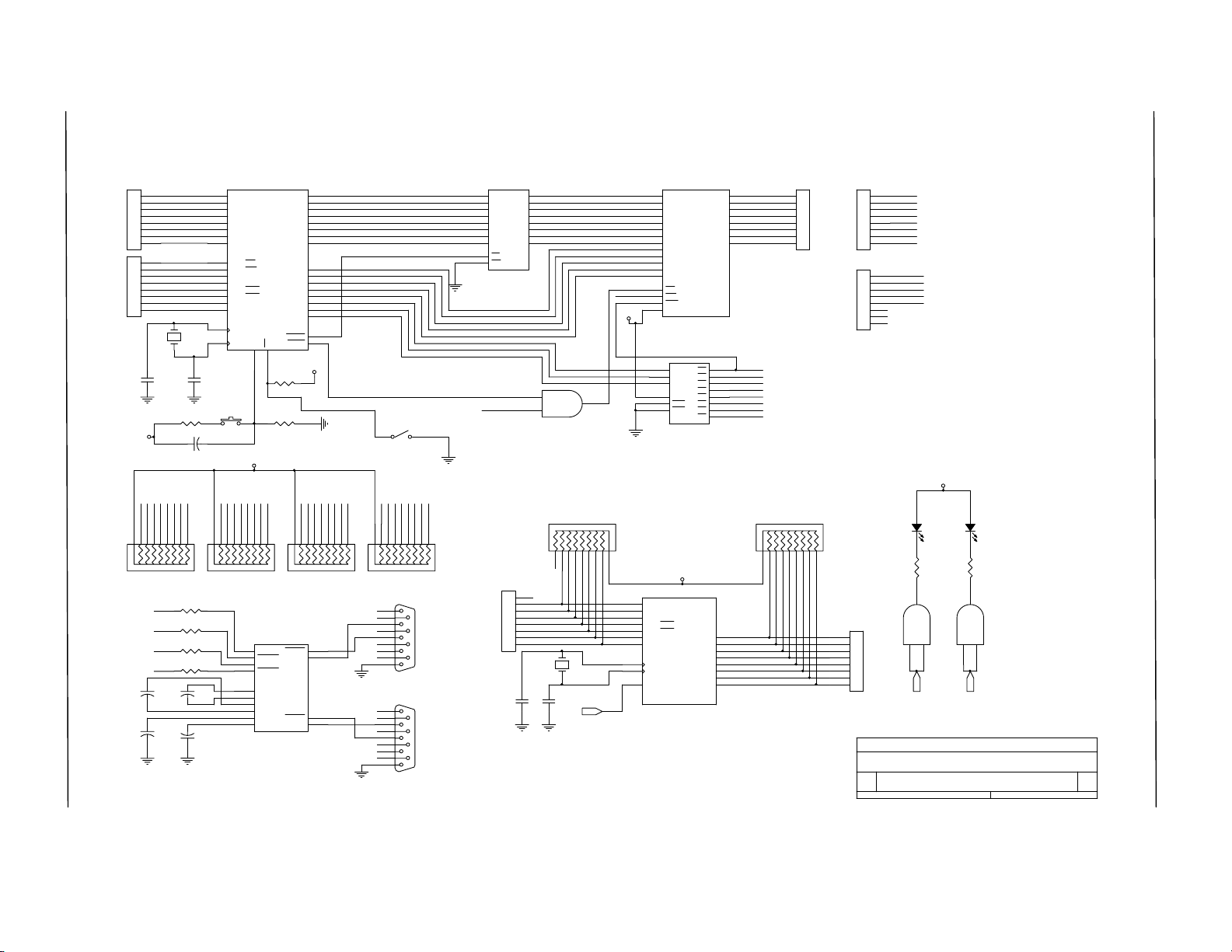
1/- MICROCONTROLLER WITH EXTERNAL RAM:
Là khối điều khiển trung tâm gồm một vi điều khiển AT89C51 có nối kết với
RAM ngoài và một vi điều khiển AT89C2051. AT89C51 có thể chạy bằng bộ nhớ
trong (internal memory, dung lượng 4Kb) hoặc chạy bằng bộ nhớ ngoài (external
memory, dung lượng 8Kb).
Các socket trên module này bao gồm:
TÊN CHỨC NĂNG
JP7: P1_CPU PORT 1, CPU 89C51
JP8: P3_CPU PORT 3, CPU 89C51
JP3: P2_ADDRESS PORT 2, CPU 89C51
JP1: DATA_CPU PORT 0, CPU 89C51
JP2: DECODE2_LCD PORT 0, CPU 89C51
JP4: DECODE1_8255 Tín hiệu giải mã cho PPI 8255A
JP3: P1_89C2051 PORT 1, CPU 89C2051
JP4: P3_89C2051 PORT 3, CPU 89C2051
2/- PPI 8255A:
Module giao tiếp song song, gồm các socket sau:
TÊN CHỨC NĂNG
JP9: DATA_8255 DATA BUS, 8255A
JP10: CTRL_8255 Các tín hiệu điều khiển 8255A
JP11: PA_8255 PORT A, 8255A
JP12: PB_8255 PORT B, 8255A
JB13: PC1_8255 PORT C, 8255A
JB14: PC2_8255 PORT C, 8255A
Phòn
g
thí n
g
hiệm Tự độn
g
hoá – Vi điều khiển Tài liệu thí n
g
hiệm Vi điều khiển
Tran
g
2
Phòng thí nghiệm Tự động hoá – Vi điều khiển Tài liệu thí nghiệm Vi điều khiển
Trang 3
3/- COUNTER:
Gồm một socket:
JP15: COUNTER, cung cấp xung cho mạch đếm, dùng để mô phỏng cho bài
thí nghiệm đếm sản phẩm.
4/- MATRIX LED 8x5:
Module ma trận LED 8 hàng, 5 cột, các bit hàng và cột đều tác động ở mức
cao . Các socket bao gồm:
TÊN CHỨC NĂNG
JP24: DATA_MATRIX 8 ĐƯỜNG DATA MATRẬN LED
JP25: CATHOD BLUE 5 ĐƯỜNG ĐIỀU KHIỂN CỘT LED XANH
JP26: CATHOD RED 5 ĐƯỜNG ĐIỀU KHIỂN CỘT LED ĐỎ
5/- LED _ LCD TC1602A:
Gồm 8 led đơn, 5 ly màu đỏ, tác động ở mức cao và một LCD TC1602A,
module gồm các socket sau:
TÊN CHỨC NĂNG
JP27: DATA LED 8 BIT ĐIỀU KHIỂN LED ĐƠN
JP22: DATA LCD 8 BIT DATA CỦA LCD
JP23: CONTROL_LCD ĐƯỜNG ĐIỀU KHIỂN ĐỌC/ GHI LCD
6/- LED 7 ĐOẠN:
Module gồm 8 led 7 đoạn cathod chung, các đường DATA và điều khiển đều
tác động ở mức cao. Các socket:
TÊN CHỨC NĂNG
JP20: DATA_LED7S. 8 BIT DATA CỦA LED 7 ĐOẠN
JP21: CONTROL_LED7S 8 BIT ĐIỀU KHIỂN LED
7/- STEP MOTOR:
Gồm một động cơ bước và mạch điều khiển, có một socket:
JP28: STEP_MOTOR, các đường điều khiển tác động cao.
8/- CONTROL_KEYBOARD:
Gồm 4 phím nhấn, có một socket:
JP29: DATA_SW

Phòng thí nghiệm Tự động hoá – Vi điều khiển Tài liệu thí nghiệm Vi điều khiển
Trang 4
9/- DAC0808:
Gồm một mạch DAC 8 bit sử dụng IC DAC0808, ngõ ra của mạch được nối với
một LED 5 ly, dùng để điều khiển độ sáng của LED theo giá trị số ở ngõ vào. Module
có một socket:
JP18: DATA_DAC, gồm 8 bit data của bộ biến đổi số – tương tự.
10/- ADC0804:
Gồm mộ ADC 8 bit sử dụng IC ADC0804, ngõ vào tương tự là bộ cảm biến
nhiệt độ dùng LM335, module gồm 2 socket:
TÊN CHỨC NĂNG
JP16: DATA_ADC 8 BIT NGÕ RA SỐ
JP17: CONTROL_ADC CÁC ĐƯỜNG TÍN HIỆU ĐIỀU KHIỂN
II. SƠ ĐỒ NGUYÊN LÝ CÁC KHỐI:
D4
JP1
DATA_CPU
1
2
3
4
5
6
7
8
C6
33p
VCC
D1
A11
A5
A0
VCC
A8
INT1
Y7
D6
D6
A9
WR
RXD
P1.1
R64
270
RD
D2
U5 74LS138
1
2
3
15
14
13
12
11
10
9
7
6
4
5
A
B
C
Y0
Y1
Y2
Y3
Y4
Y5
Y6
Y7
G1
G2A
G2B
P1.0
JP7
P1_CPU
1
2
3
4
5
6
7
8
D7
R61 2K2
A15
U6A 74LS08
1
2
3
T1
P1.0
A14
RD
A9
RESET
A10
C8
10uF
Y2
11,0592Mhz
PSEN
RN6 10K
1
2
3
4
5
6
7
8
9
<Doc> <Rev Code>
MICROCONTROLLER WITH EXTERNAL RAM
B
11Monday, July 24, 2006
Tit le
Size Document Number Rev
Date: Sheet of
T1
TXD1
WR
P1.2
A1
JP5
P1_89C2051
1
2
3
4
5
6
7
8
A15
Y5
P1.7
Y3
D2
U23
AT89C2051
1
5
4
12
13
14
15
16
17
18
19
2
3
6
7
8
9
11
RST/VPP
XTA L1
XTA L2
P1.0/AIN0
P1.1/AIN1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
P3.0/RXD
P3.1/TXD
P3.2/INT0
P3.3/INT1
P3.4/T0
P3.5/T1
P3.7
JP4
DECODE1_8255
1
2
3
4
5
6
7
8
Y4
Y1
11,0592Mhz
R62 2K2
RXD
Y1
A8
A12
C9
10uF
P1.3
A11
P1.3
TXD1
P1.5
P1.6
TXD
(0000H - 1FFFH)
RD
Y8
RN3 10K
1
2
3
4
5
6
7
8
9
A13
R60 2K2
D17
READY
PC INTERFACE
A3
A15
D0
A7
VCC
A12
JP3
P2_ADDRESS
1
2
3
4
5
6
7
8
A13
COMPORT 2051
A12
INT1
U6C
7408
9
10
8
Y2
A14
D4
D1
INT0
VCC
A14
R63
270
A13
P1.0
D5
A11
DB9_2 (Male)
5
9
4
8
3
7
2
6
1
A1
RXD1
D19
DATA LOAD
P1.7
T0
RXD
DB9_1 (Female)
5
9
4
8
3
7
2
6
1
R19 100
A10
INT0
D5
U6B
7408
4
5
6
R59 2K2
VCC
C15
10p
D7
A4P1.4
C10
10uF
C5
10p
D3
D6
A2
Y6
D4
A6
P1.4
RN4 10K
1
2
3
4
5
6
7
8
9
RN7 10K
1
2
3
4
5
6
7
8
9
TXD
SW1
MEMORY SELECTION
1 2C7 10uF/50V
RN5 10K
1
2
3
4
5
6
7
8
9
RESET
A0
U20
MAX232
1
3
4
5
2
6
12
9
11
10
13
8
14
7
C1+
C1-
C2+
C2-
V+
V-
R1OUT
R2OUT
T1I N
T2I N
R1IN
R2IN
T1OU T
T2OU T
P1.2
D7
P1.1
D5
U2
SN74LS374
3
4
7
8
13
14
17
18
1
11
2
5
6
9
12
15
16
19
D0
D1
D2
D3
D4
D5
D6
D7
OE
LE
Q0
Q1
Q2
Q3
Q4
Q5
Q6
Q7
WR
P1.1
P1.6
TXD
R28 10K
D2
P1.5
U1 AT89C51
9
18
19
29
30
31
1
2
3
4
5
6
7
8
21
22
23
24
25
26
27
28
10
11
12
13
14
15
16
17
39
38
37
36
35
34
33
32
RST
XTA L2
XTA L1
PSEN
ALE/PROG
EA/VPP
P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
P2.0/A8
P2.1/A9
P2.2/A10
P2.3/A11
P2.4/A12
P2.5/A13
P2.6/A14
P2.7/A15
P3.0/RXD
P3.1/TXD
P3.2/INT0
P3.3/INT1
P3.4/T0
P3.5/T1
P3.6/WR
P3.7/RD
P0.0/AD0
P0.1/AD1
P0.2/AD2
P0.3/AD3
P0.4/AD4
P0.5/AD5
P0.6/AD6
P0.7/AD7
RESET SW
JP6
P3_89C2051
1
2
3
4
5
6
7
8
C23
10p
RXD1
D3
A8
A10
D3
WR
Y2
JP8
P3_CPU
1
2
3
4
5
6
7
8
VCC
D0
D1
C11
10uF
T0
A9
D0
U4 6264
10
9
8
7
6
5
4
3
25
24
21
23
2
11
12
13
15
16
17
18
19
22
27
20
26
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
D0
D1
D2
D3
D4
D5
D6
D7
OE
WE
CS1
CS2
RD
R67 10K
RN2 10K
1
2
3
4
5
6
7
8
9
Phòn
g
thí n
g
hiệm Tự độn
g
hoá – Vi điều khiểnTài liệu thí n
g
hiệm Vi điều khiển
Tran
g
5


![Tài liệu học tập Vi điều khiển ứng dụng trong đo lường và điều khiển [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2021/20210705/lovebychance06/135x160/7771625534375.jpg)























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)