GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1147
§1. Lực quán tính
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1146
Chương 11
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1148
O
z
x
y
a
n
τ
a
τ
n
a
qt
n
F
qt
F
τ
qt
F
M
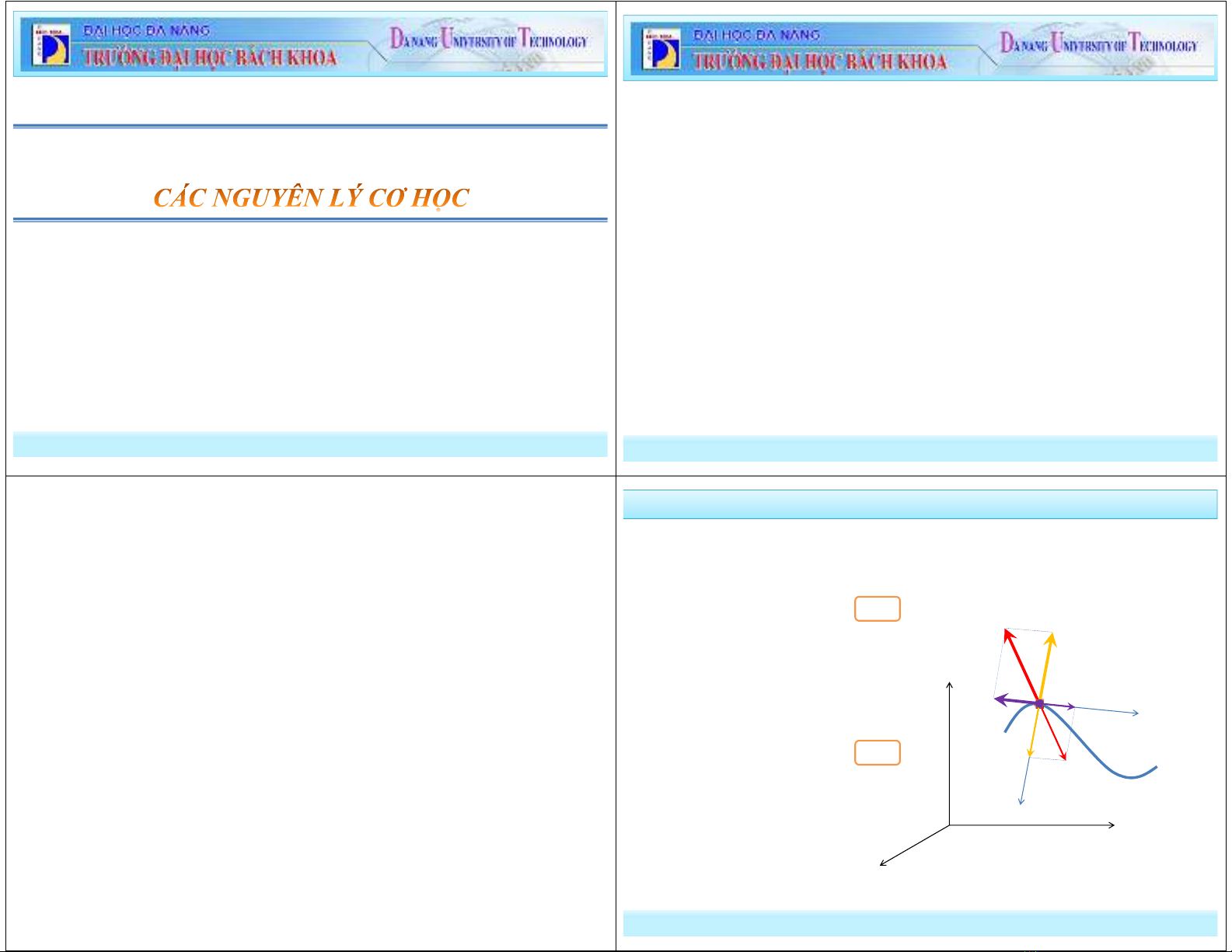
Chất điểm M có khối lượng m, chuyển động với gia tốc dưới tác
dụng của hệ lực trong hệ quy chiếu quán tính.
a
qt
F ma= −
* Trong hệ trục Oxyz:
qt
x
qt
y
qt
z
F mx
F my
F mz
= −
= −
= −
ɺɺ
ɺɺ
ɺɺ
1. Định nghĩa
11.1
11.2
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1149
qt qt qt
n
F F F
τ
= +
* Trong hệ trục tọa độ tự nhiên:
Với:
qt
n
n
qt
F ma
F ma
τ
τ
= −
= −
: lực quán tính pháp
: lực quán tính tiếp
Từ định nghĩa ta thấy lực quán tính không phải là lực thực sự
tác dụng lên chất điểm khảo sát. Lực quán tính là lực ảo.
-Giả sử chất điểm có véc tơ gia tốc với chiều giả thiết
-Véc tơ lực quán tính được đặt ngược chiều với véc tơ gia tốc giả
thiết này.
-Giá trị đại số của lực quán tính theo chiều đã đặt tính theo công
thức: , với a là giá trị đại số.
a
qt
F ma
=
Lưu ý chiều, giá trị đại số của lực quán tính khi làm toán:
11.3
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1151
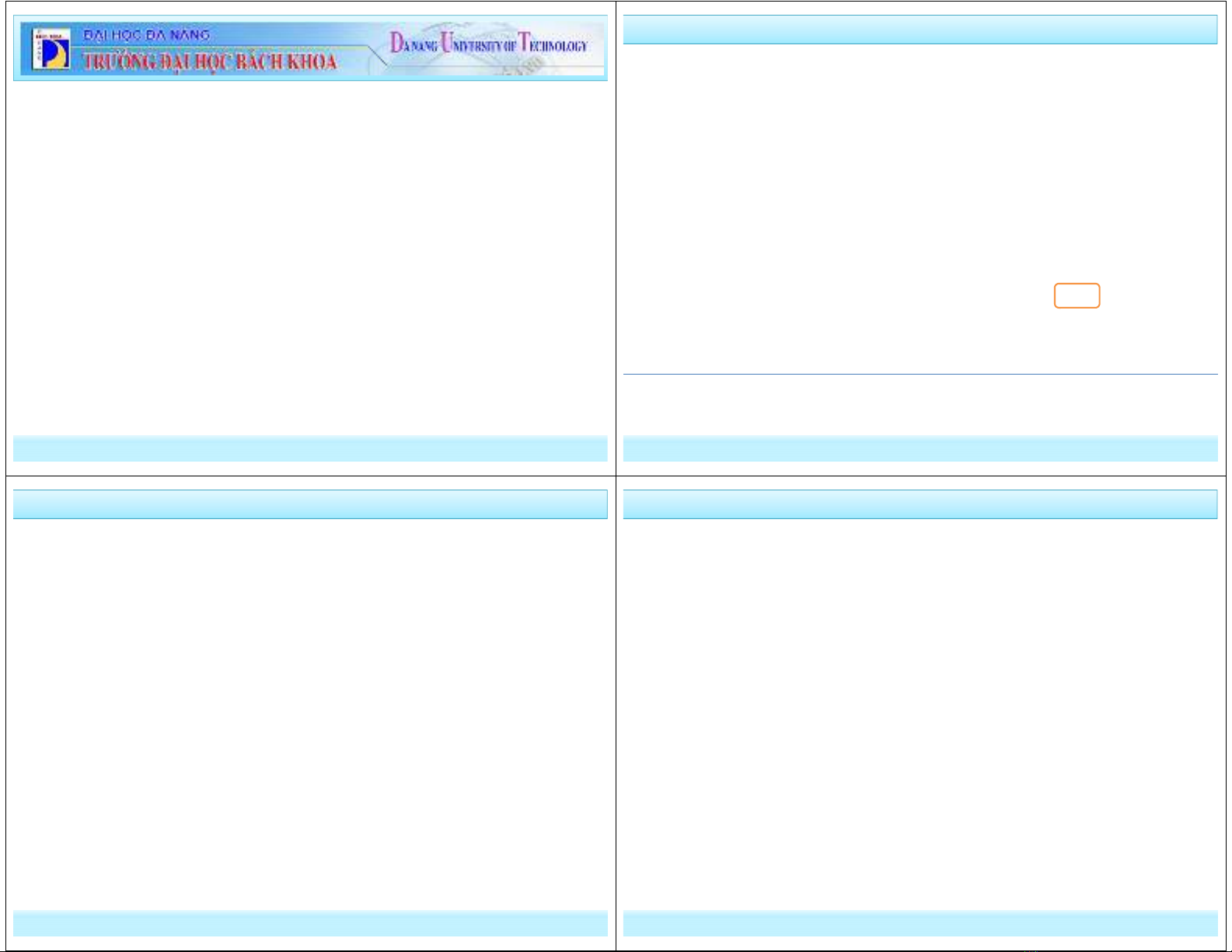
c. Vật quay quanh một trục z cố định
2
2
qt
OC
qt
xxz yz
qt
yyz xz
qt
z
z
R Ma
M J J
M J J
M J
ε ω
ε ω
ε
= −
= −
= − +
=
ω
ε
C
z
x
y
O
Thu gọn hệ lực quán tính về O
Nếu trục z là trục quán tính chính
, 0,
qt qt qt qt
O x y z
C z
R Ma M M M J
ε
= − = = =
(
)
0
yz xz
J J
= =
Nếu trục z là trục quán tính chính trung tâm
(
)
0,
yz xz
J J O C
= = ≡
0, 0,
qt qt qt qt
O x y z
z
R M M M J
ε
= = = =
11.6
11.7
11.8
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1150
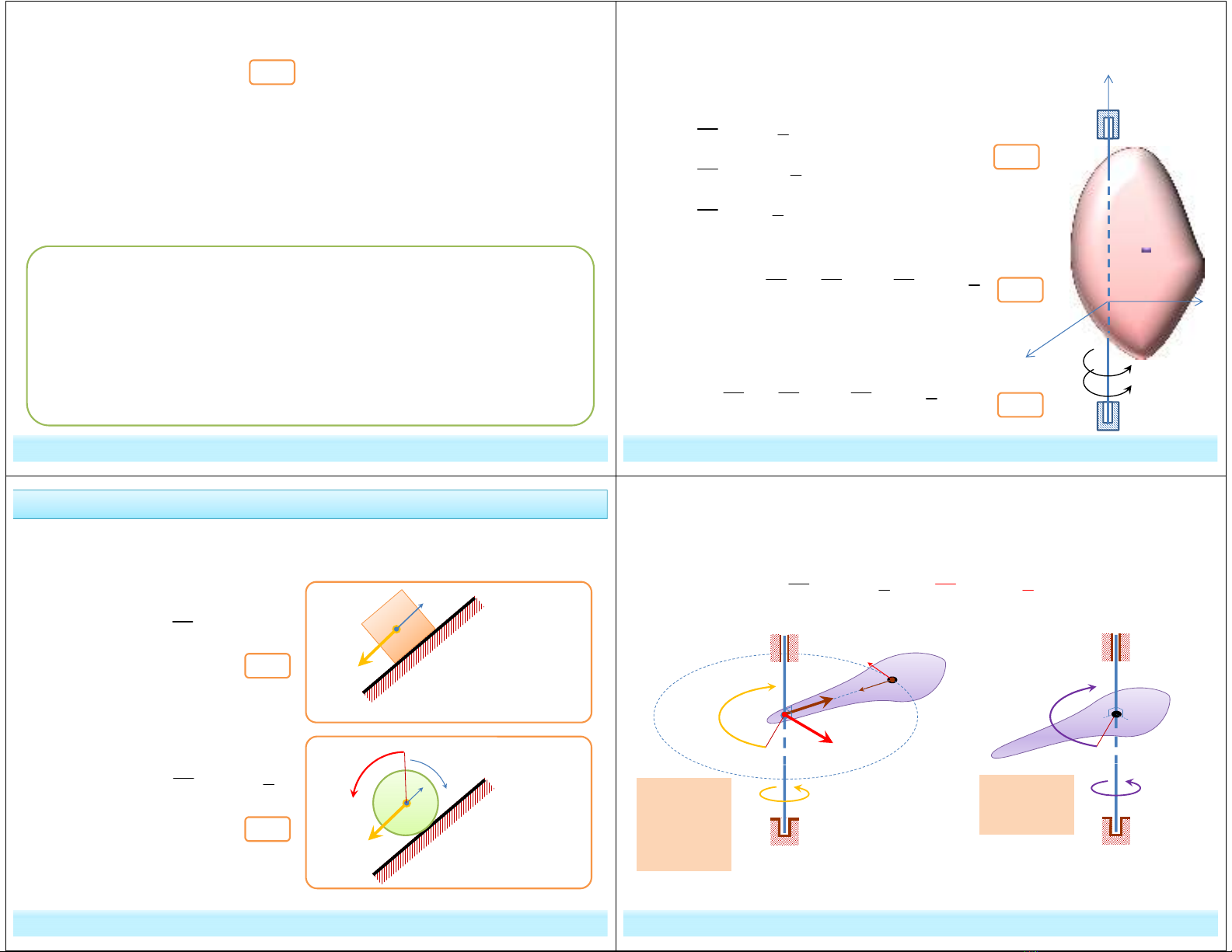
b. Vật chuyển động song phẳng
;
qt qt
C C
C C sp
R Ma M J
ε
= − = −
C
sp
ε
C
a
qt
C
R
qt
C
M
.
qt
C O sp
M J
ε
=
.
qt
C C
R M a
=
a. Vật chuyển động tịnh tiến
, 0
qt qt
C C
C
R Ma M
= − =
C
C
a
qt
C
R
.
qt
C C
R M a
=
2. Thu gọn hệ lực quán tính đối với hệ chất điểm
Các kết quả sau, người đọc tự chứng minh hoặc tham khảo khác.
11.4
11.5
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1152
d. Tấm phẳng quay quanh một trục cố định vuông góc với tấm
Tấm phẳng quay quanh trục cố định z, trục Oz đi qua O và vuông góc
với tấm. Trục z là trục quán tính chính.
( )
,
qt qt qt
z
O
O
zO
C
RMM J
J
Ma
ε
ε
⇔ == = − −−
ε
O
z
C
a
τ
n
a
qt
F
τ
qt
n
F
qt
O
M
( z là trục quán tính chính)
.
.
.
qt
qt
n n
qt
O O
F m a
F m a
M J
τ τ
ε
=
=
=
ε
O C
≡
z
qt
O
M
( z là trục quán tính chính
trung tâm)
0
.
qt
O
qt
O O
F
M J
ε
=
=
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1153
§2. Nguyên lý D’Alembert
Nguyên lý D’Alembert cho phép chúng ta giải các bài toán
động lực học bằng cách thiết lập các phương trình chuyển
động của hệ dạng các phương trình cân bằng quen thuộc. Đó
chính là nội dung của phương pháp tĩnh động lực học.
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1155
Tại mỗi thời điểm, nếu đặt thêm vào mỗi chất điểm của hệ các lực quán
tính tương ứng thì cùng với các ngoại lực và nội lực thực sự tác dụng
lên hệ. Ta sẽ được một hệ cân bằng.
Cho: là ngoại lực
{
}
e
k
F
là nội lực. (Bằng 0 đối với hệ vật rắn tuyệt đối cứng)
{
}
{
}
{
}
( , , ) 0
e i qt
k k k
F F F
∼
Theo nguyên lý:
{
}
i
k
F
{
}
qt
k
F
là quán tính
2. Đối với cơ hệ
11.9
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1154
Tại mỗi thời điểm nếu đặt thêm vào chất điểm lực quán tính của nó ta
được một hệ lực cân bằng gồm lực chủ động, lực liên kết và lực quán
tính của chất điểm.
Cho: là lực chủ động
F
N
là lực liên kết
qt
F
là lực quán tính
( , , ) 0
qt
F N F
∼
Theo nguyên lý:
1. Đối với chất điểm
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1156
3. Lưu ý khi vận dụng Nguyên lý
{
}
{
}
{
}
( , , ) 0
e i qt
k k k
F F F
∼
Theo nguyên lý:
-Công thức trên đúng với mọi thời điểm, nên xét tại thời điểm nào
thì các đại lượng trong công thức xác lập tại thời điểm đó.
-Hệ lực trên là cân bằng nên ta có thể thực hiện viết các phương
trình cân bằng theo lý thuyết lực.
-Do hệ lực trên là cân bằng tại thời điểm bất kỳ nên công của hệ lực
trên gây ra trên chuyển vị bé tại thời điểm bất kỳ đó cũng bằng 0.
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1157
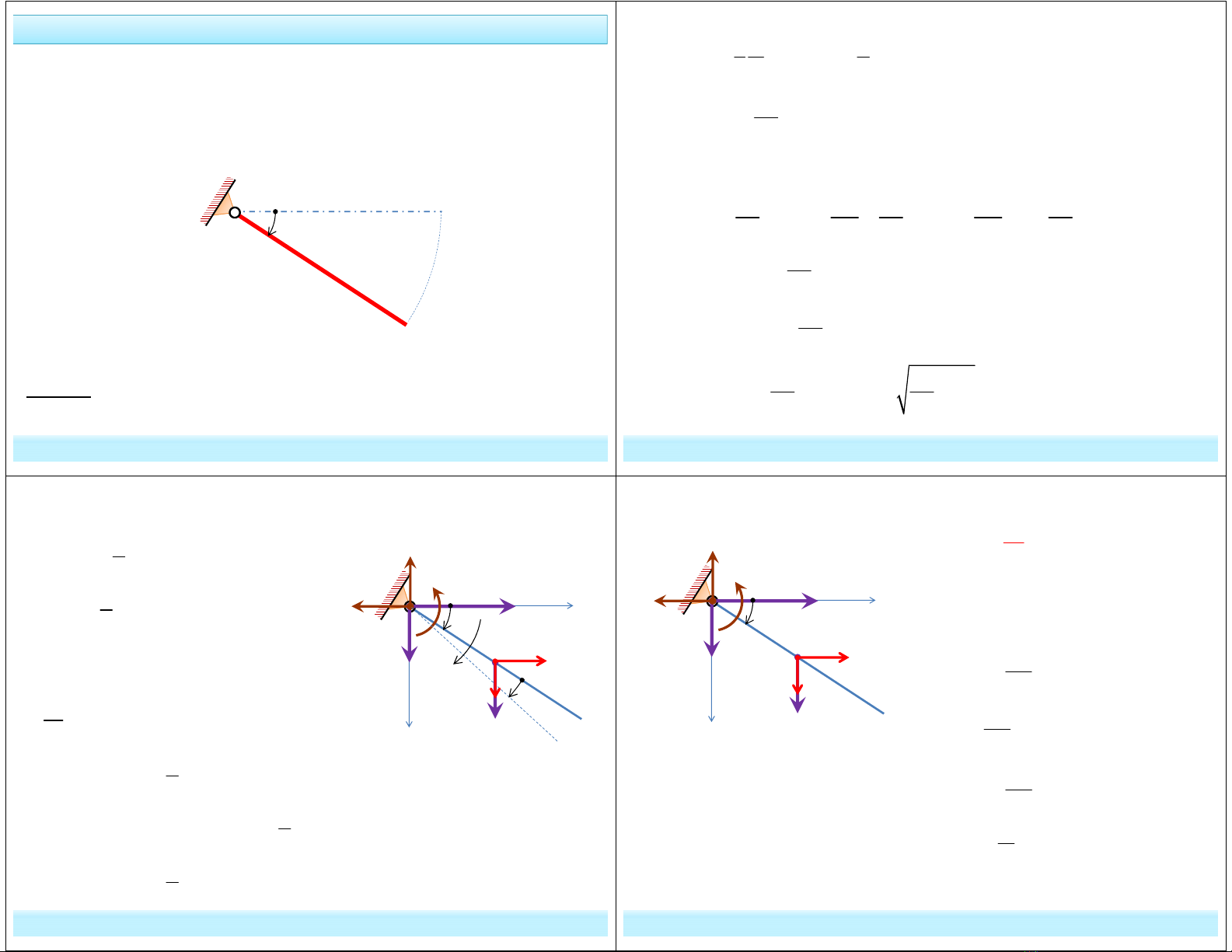
Thanh thẳng mảnh AB có chiều dài l, trọng lượng P. Lúc đầu người ta
giữ thanh đứng yên nằm ngang, rồi thả cho thanh chuyển động quay tự
do không vận tốc đầu trong mặt phẳng thẳng đứng dưới tác dụng của
trọng lượng của nó. Tính phản lực liên kết tại A khi thanh chuyển động.
Bài tập 11.1- xem bài 10.25
A
B
ϕ
Bài giải:
Xét thời điểm tổng quát t, khi thanh AB quay được góc là ϕ.
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1159
2
1
. . . cos . 0
3 2
P l
l P
g
ε δϕ ϕ δϕ
⇒− + =
3
cos
2
g
l
ε ϕ
⇒
=
* Tính vận tốc góc của thanh AB khi xoay góc ϕ.
0 0
2
3 3 3
cos cos cos
2 2 2
3cos
2
3cos
2
3 3
sin sin
2 2
g d g d g
d d
l dt l dt l
g
d d
l
g
d d
l
g g
l l
ϕ
ω
ω ω
ε ϕ ϕ ϕ ϕ ϕ
ω ω ϕ ϕ
ω ω ϕ ϕ
ω ϕ ω ϕ
=⇒=⇒=
⇒=
⇒=
⇒=⇒=
∫ ∫
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1158
* Tính gia tốc góc của thanh AB khi xoay góc ϕ
ϕϕ
ϕ.
( )
( )
2
2
cos .sin
2
sin .cos
2
x
y
l
a
l
a
ω ϕ ε ϕ
ω ϕ ε ϕ
= − +
= − +
A
X
A
Y
P
x
y
A
B
C
qt
y
F
qt
x
F
qt
A
M
ϕ
δϕ
ε
x
a
y
a
Ta có:
[ ]
[ ]
–
( , , , , , ) 0
. . sin( ) sin 0
2
. . sin cos . sin 0
2
. . cos . 0
2
qt qt
qt
A y x A A
qt
A
Taylor Maclaurin qt
A
qt
A
M F F X Y P
l
M P
l
M P
l
M P
δϕ ϕ δϕ ϕ
δϕ ϕ ϕ δϕ ϕ
δϕ ϕ δϕ
⇒− + + − =
→− + + − =
⇒− + =
∼
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1160
( )
( )
( )
2
2
2
( , , , ) 0
0
0
cos .sin
2
sin .c os
2
9sin 2
8
9sin 1 0
,
4
,
A A
qt
A x
qt
A
qt qt
qt
A
y
A
A
y
A
A
x
Y X P
XX F
Y F P
Y
Pl
Xg
Pl
Y P
g
P
X
P
Y
M F F
ω ϕ ε ϕ
ω ϕ ε ϕ
ϕ
ϕ
==
⇒ ⇒
= −
=
= − +
⇒
= − + −
= −
⇒
= − + <
∑
∑
∼
A
X
A
Y
P
x
y
A
B
x
a
y
a
C
qt
y
F
qt
x
F
qt
A
M
ϕ
* Tính phản lực liên kết tại A khi thanh AB khi xoay góc ϕ
ϕϕ
ϕ.
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1161
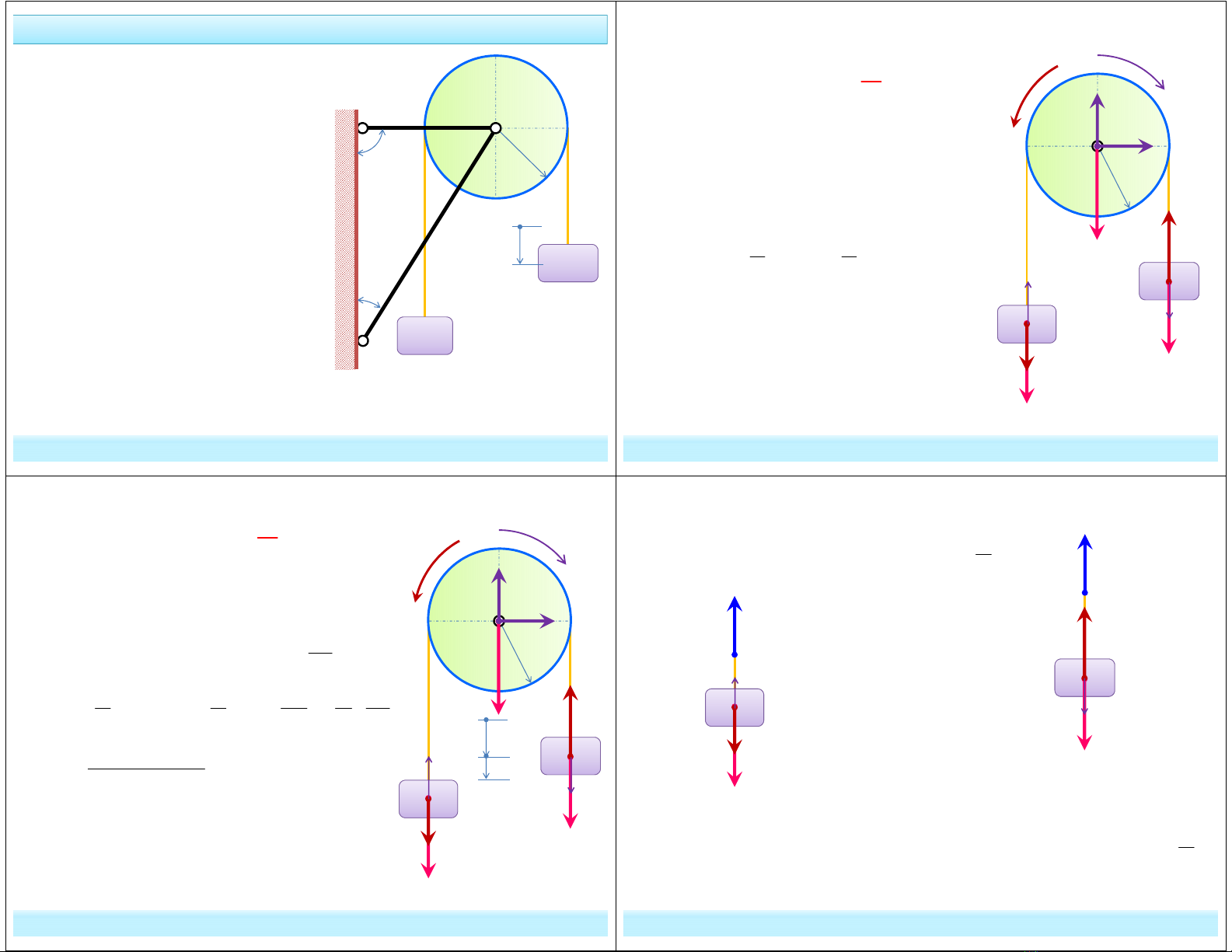
Bài tập 11.2 – xem 10.9
Cho đĩa tròn có bán kính R, trọng
lượng P có thể quay quanh trục
ngang tại khớp O. Hai vật có trọng
lượng là Q1, Q2 (Q2 > Q1) được buộc
vào hai đầu dây quấn trên biên đĩa
tròn. Dây không trọng lượng, không
giãn, khi chuyển động không trượt
đối với đĩa tròn. Cho hệ chuyển động
từ trạng thái đứng yên. Khi vật (2) đi
được quãng đường s, yêu cầu:
1. Xác định gia tốc của các vật
2. Tìm phản lực liên kết của đĩa tại
trục quay.
3. Lực căng trong các nhánh dây
O
A
B
s
(2)
R
0
30
0
90
(1)
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1163
O
(2)
R
(1)
2
Q
1
Q
0
X
0
Y
ε
a
a
qt
O
M
1
qt
F
2
qt
F
P
1 2
2
1
( , , , , , ) 0
, ,
qt qt qt
OOO
Y X P Q Q F F M
∼
0
0 1 1 2 2
0
0 1 2
00
( ) ( )
0
0
(1 ) (1 )
qt qt
XX
Y P Q F Q F
Y
X
a a
Y Q Q P
g g
==
⇒ ⇒
= + + + −
=
=
⇒= + + − +
∑
∑
2. Tính phản lực liên kết tại O:
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1162
O
(2)
R
(1)
2
Q
1
Q
0
X
0
Y
ε
a
a
qt
O
M
1
qt
F
2
qt
F
s
s
δ
P
1 2
2
1
( , , , , , ) 0
, ,
qt qt qt
OOO
Y X P Q Q F F M
∼
1. Tìm gia tốc khi vật (2) chuyển động xuống đoạn s
* Công do hệ lực trên thực hiện trên
mọi chuyển vị đều bằng không, nên:
2 2 1 1
( ) ( ) . 0
qt qt qt
O
s
Q F s Q F s M
R
δ
δ δ
− − + − =
2
2 1
(1 ) (1 ) ( ). 0
2
a a P a s
Q s Q s R
g g g R R
δ
δ δ
⇒− − + − =
2 1
2 1
22 2
Q Q
a g
Q Q P
−
⇒=+ +
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 1164
(1)
1
Q
a
1
qt
F
1
T
(2)
2
Q
a
2
qt
F
2
T
11
11 1 1
1
( , , ) 0 (1 )
qt qt
a
Q T T Q Q
g
F F∼
⇒
+=
= +
3. Lực căng dây:
22
22 2 2
2
( , , ) 0 (1 )
qt qt
a
Q T T Q Q
g
F F∼⇒−=
= −





















![Đề thi học kì 2 môn Vật lí 1 năm 2023-2024 có đáp án [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260507/hoahongxanh0906/135x160/64291778553454.jpg)
![Đề thi học kì 2 Vật lí 1 năm 2023-2024 có đáp án [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260507/hoahongxanh0906/135x160/1381778553461.jpg)
![Đề thi học kì 2 Vật lí 1 năm 2022-2023 có đáp án [kèm PDF]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260507/hoahongxanh0906/135x160/21778553462.jpg)


%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)