
Điều khiển máy điện – N N Tú Bộ môn Thiết bị điện
Điều khiển máy điện
Sensorless Control

Điều khiển máy điện – N N Tú Bộ môn Thiết bị điện
Giới thiệu
•Encoder có giá thành khá cao.
• Cần thêm một nguồn DC +/- 5V
• Tín hiệu encoder dễ bị nhiễu
Sensorless control
-Ước lượng tốc độ rotor từ các tín hiệu điện áp và dòng điện
(model based method)
-Điều chỉnh moment và từ thông ( >2-3Hz) rất tốt
-Sai số xác lập chỉ ngang bằng so với encoder phân giải tốt
-Chất lượng động không bằng điều khiển có cảm biến
-Khó điều khiển moment tại tần số/tốc độ thấp
Điều khiển máy điện – N N Tú Bộ môn Thiết bị điện
Giới thiệu
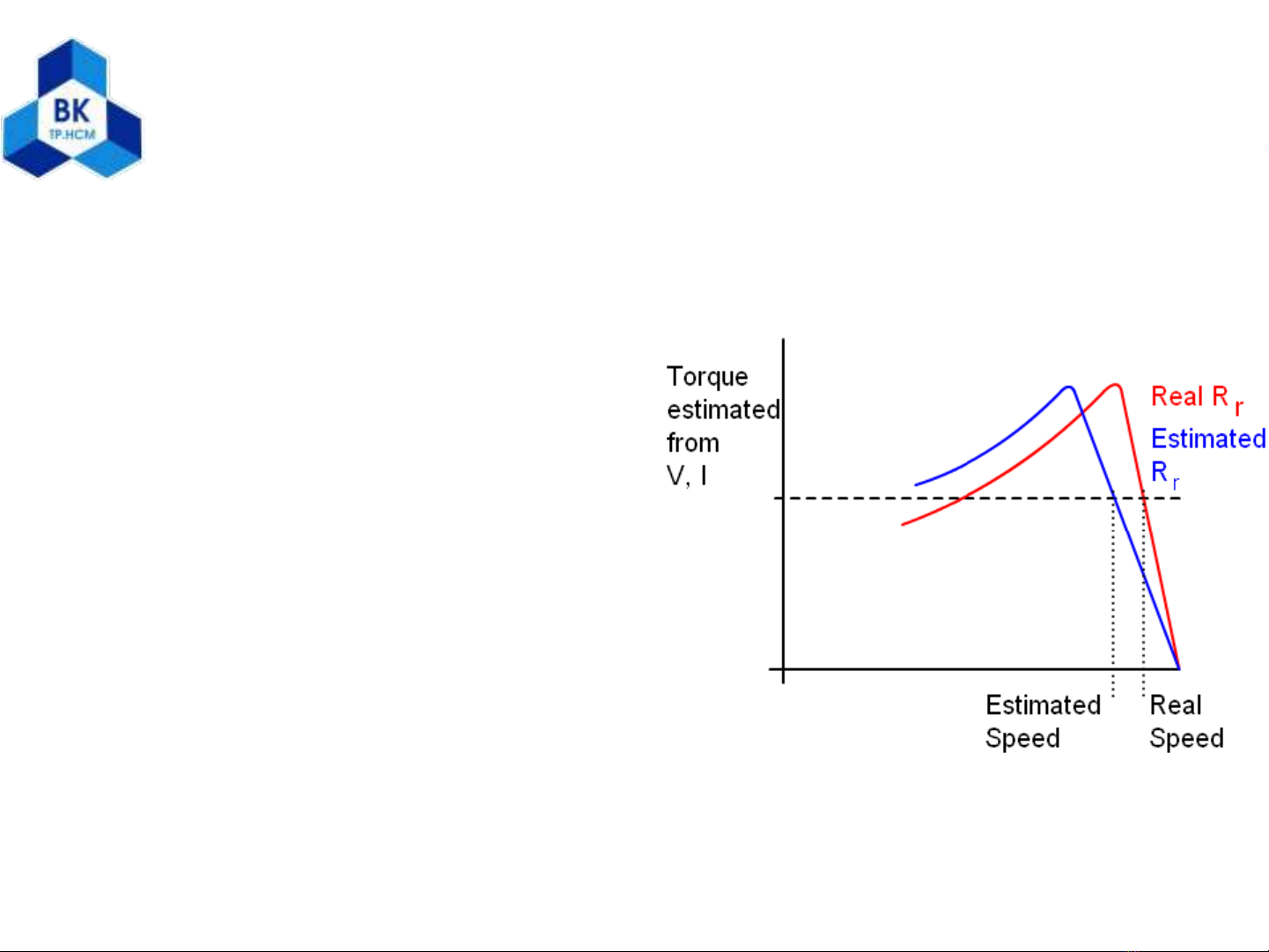
• Tốc độ ωrchỉ chính xác khi
Rrđược ước lượng chính xác
• Nói chung, độ chính xác cao
nhất đạt tới 4-8 vòng/phút, cho
dù Rrchính xác (nếu Rrkhông
được nhận dạng online thì sai
số có thể lên 10-20 vòng/phút)
• Tại tốc độ thấp ( 2-3Hz), Rs
phải được ước lượng chính xác
Điều khiển máy điện – N N Tú Bộ môn Thiết bị điện
Giới thiệu
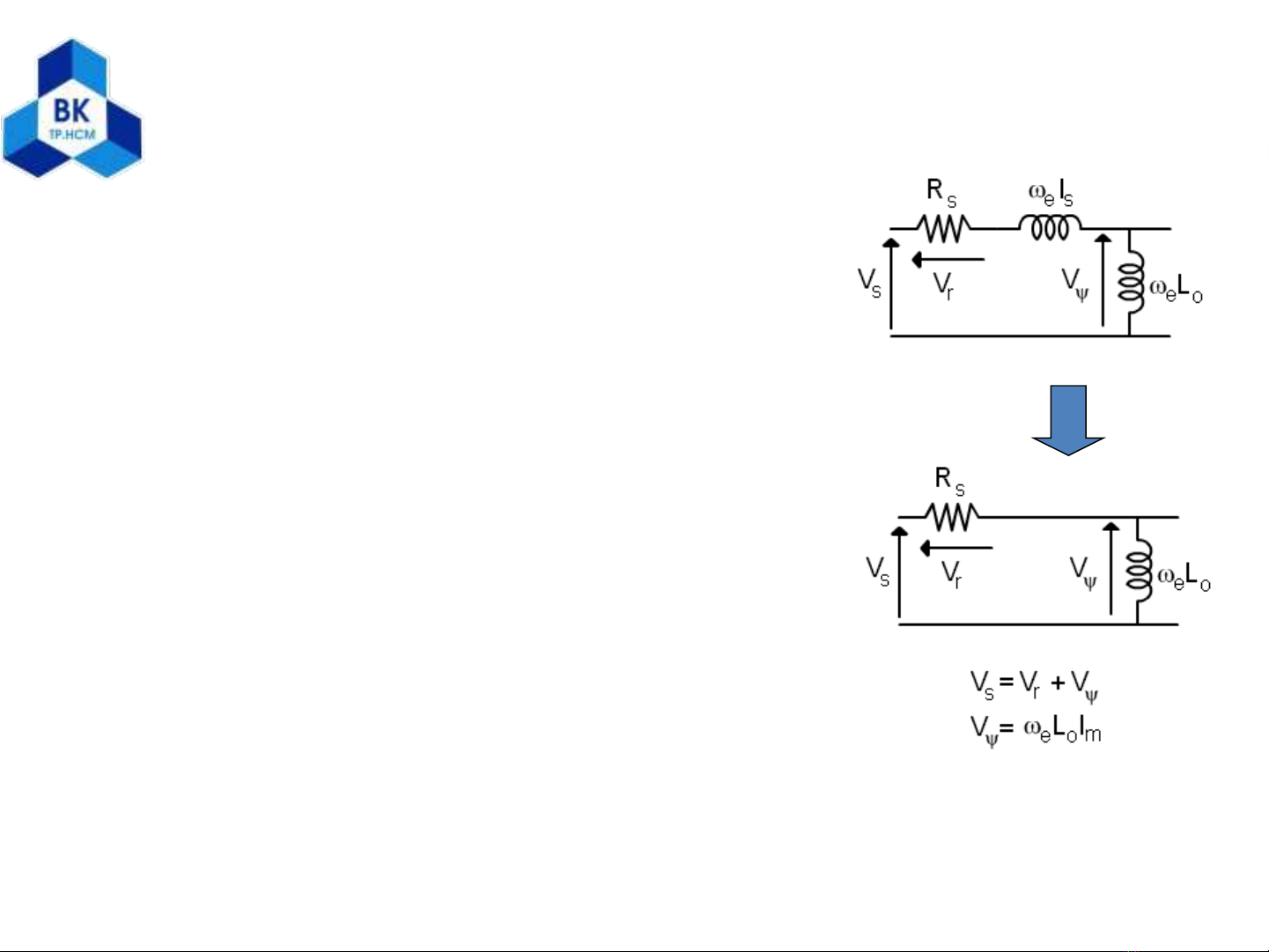
Tại tốc độ thấp
ωeLsrất nhỏ
Xét mạch tương đương của
động cơ ở xác lập
Tốc độ càng thấp thì Vψcàng
nhỏ, và Vr>> Vψ
Nếu Rskhông được chính xác
Vrsẽ không đúng. Vì thế Vψ
cũng không chính xác khó
ước lượng góc từ thông và
moment
Chất lượng của sensorless
control phụ thuộc vào việc giải
quyết vấn đề ở tốc độ thấp
Điều khiển máy điện – N N Tú Bộ môn Thiết bị điện
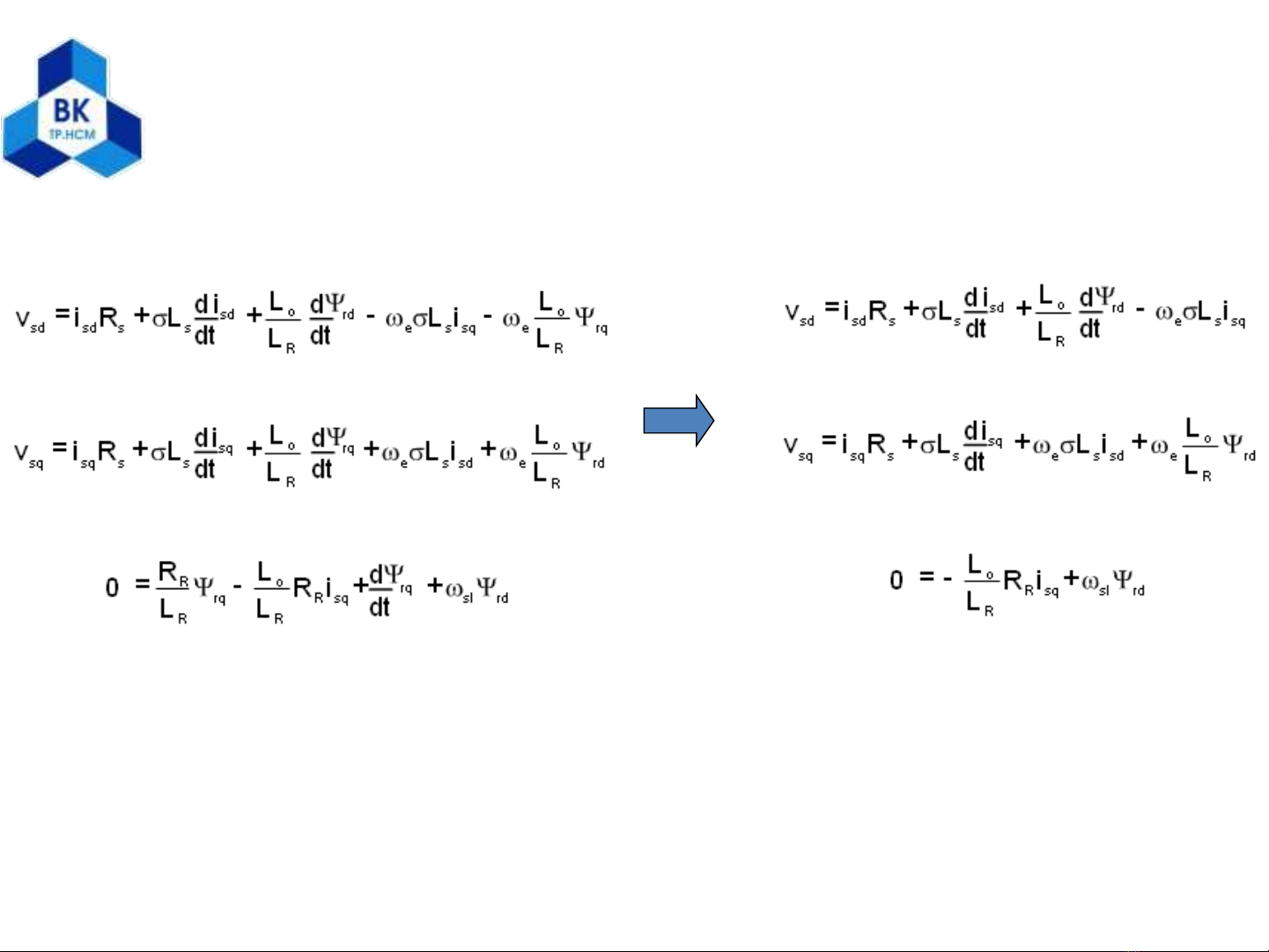
Ước lượng dùng phương trình định
hướng trường rotor
Định hướng trường
Chứng minh?

























