1
1
EE4829 Điều khiểnnốimạng
MởĐầu
TS. Trịnh Hoàng Minh
Khoa Tựđộng hóa, Trường Điện-Điệntử, ĐạihọcBách Khoa Hà Nội
Email: trinhhoangminhbk@gmail.com, minh.trinhoang@hust.edu.vn
Thông tin chung vềhọcphần
2
•Họcliệu:Giáo trình
“Điềukhiểnhệđatáctử”, TS. Trịnh Hoàng Minh, Nguyễn
Minh Hiệu, Khoa Tựđộng hóa, Trường Điện-Điệntử, ĐạihọcBáchKhoa HàNội.
•Tàiliệuthamkhảo:
M. Mesbahi & M. Ergestedt. Graph Theoretic Methods in Multiagent Networks, Princeton
University Press,
2010
F. Bullo, Lectures on Network Systems, Kindle Direct Publishing,
2020
H.-S. Ahn, Formation control: Approaches for distributed agents, Springer,
2020
W. Ren, Y. Cao, “Distributed Coordination of Multi-agent Networks: Emergent Problems,
Models, and Issues”, Springer,
2011
D. Zelazo,Lectureson“Analysis andControl of Multi-Agent Systems”
Trịnh HoàngMinh, NguyễnMinh Hiệu, “Điềukhiểnhệđatáctử”.
và mộtsố bài báo khoa họckhác
•Kiểmtra/Đánhgiá:
Bài tập
Bài tậplớn/Kiểm tragiữakỳ
Kiểmtracuốikỳ
•Phầnmềm: MATLAB-SIMULINK (Version
2018
a trở lên)
Mộtsốhệđatáctửtrong tựnhiên
3
Hiệntượng tụbầyở chim sáo
Tụbầyở cáĐàn chim di cưhình chữV
Kiếnxâycầu
Hiệntượng bầyđàn trong tựnhiên
4
Hiệntượng tụbầyở chim sáo
Tụbầyở cáĐàn chim di cưhình chữV
Đặcđiểmchung:
•Sốlượng cá thểlớn
•Mụcđích: thựchiệnmộthaymộtsố
công việcchungcóýnghĩavớicuộc
sống củacảbầy
•Tính chất: bềnvững, phi tập
trung/phân tán
2
•Mô hình Vicsek
1995
:Môhìnhtoánhọc cho hiệntượng tụ
bầyvàthựchiệnmôphỏng trên máy tính
•Vậntốccủamỗitáctửthờiđiểm
𝑡
:
𝑣
𝑡∈ℝ
,𝑖1, … , 𝑛
•Luậtcậpnhật:
𝜃
𝑡11
|𝑀
|
𝜃
𝑡
∈
𝜈
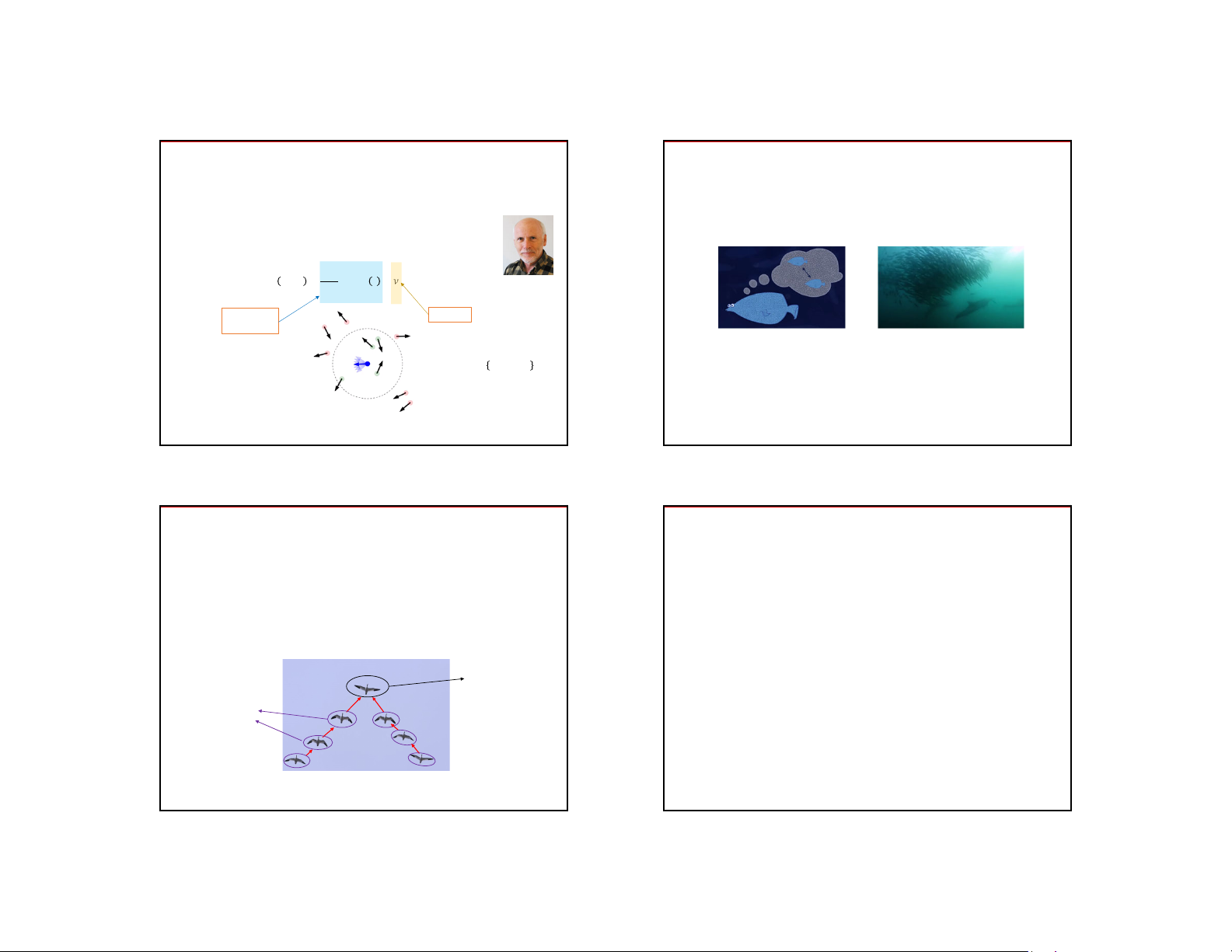
Cơchếcủahiệntượng bầyđàn
5
Vậntốc
trung bình
Nhiễu
T. Vicsek, A. Czirók, E. Ben-Jacob, I. Cohen, and O. Shochet. “Novel Type of Phase Transition in a System of Self-Driven
Particles”, Phys. Rev. Lett.75, 1226 – Published 7 Aug 1995
𝑀
𝑖∪𝑗| 𝒑
∈𝐶
𝒗
𝟏∠𝜃
Cơchếcủahiệntượng bầyđàn
•Tụbầyở cá
Mỗicáthể(tác tử) trong bầytuântheo
2
luật:
•Giữkhoảng cách gần, nhưng không quá sát vớicáctáctửkhác để
tránh va chạm
•Giữvậntốcbằng vớicáctáctửở lân cận
6
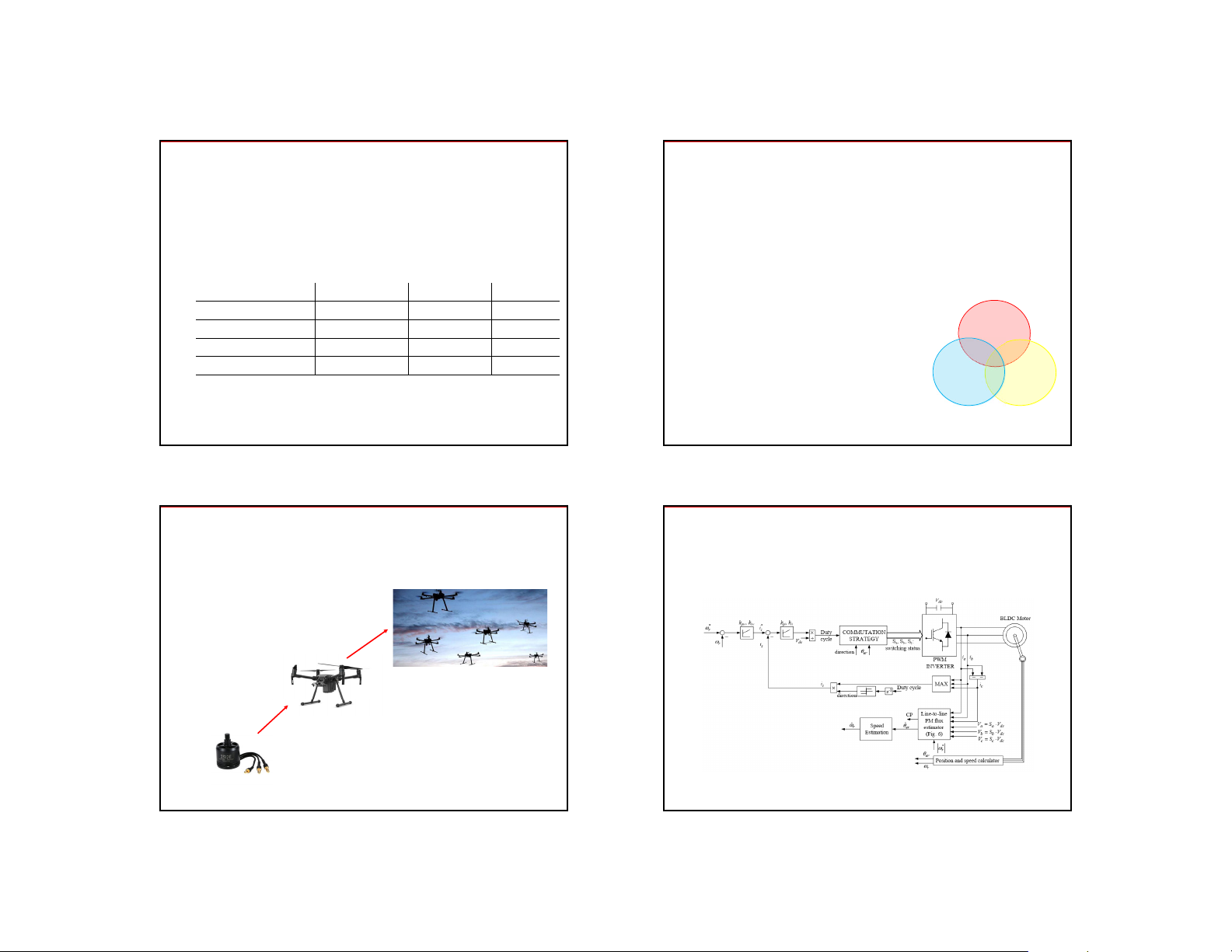
Cơchếcủahiệntượng bầyđàn
•Đàn chim bay di cưtheo độihìnhchữV
•Mộtcáthểdẫnđàn (cầnnhiềunăng lượng nhất)
•Các tác tửkhác theo sau tác tửđầuđàn
•Các tác tửthay phiên nhau dẫnđàn (hợptác)
Tác tử
dẫnđàn
Tác tử
theo sau
Độihìnhchimdicưbaytheo hình chữV
7
Phân tích và điềukhiểnhệđatáctử
•Các mạng/hệđatáctửnhân tạo (complex large-scale systems):
•Hệthống điện
•Mạng lưới giao thông
•Đội hình các mobile robot, UAV, UUV
•Mạng cảmbiến không dây
•Mạng xã hội
•…
•Nhu cầu: các phương pháp tổng quát đểmô hình hóa, mô phỏng, phân
tích, thiếtkế,hiệnthựchóa,kiểmtra,đánh giá các hệthống phứchợp
8

3
Hệđatáctửtrong kĩthuật
9
Intel shooting stars drone show
Hệđatáctửtrong kĩthuật
Độihìnhquadcopter
Mỗiquadcopterlàmộttáctửtrong hệ.Mộttáctửđóng vai trò là tác tửđầuđàn, các tác
tửkhác di chuyển bám theo tác tửđầuđàn và duy trì khoảng cách vớimộtsốtác tửkhác.
10
S.-M. Kang, M.-C. Park, B.-H. Lee & H.-S. Ahn. Distance-based formation control with a single moving leader.
In: Proc. of American Control Conference. IEEE, 2014. pp. 305-310.
Hệđatáctửtrong kĩthuật
Mạng cảmbiếntrongcảnh báo cháy rừng. Mỗicảmbiếnlàmộtnúttrongmạng, có khảnăng
đođạc(vịtrí, nhiệtđộ,độẩm,…), tính toán và truyềnthôngvớimộtsốnút lân cận. Khi có
cháy xảyra,nútpháthiệncháygửithôngtincảnh báo cháy tớinhững nút lân cận, từđó
thông tin lan truyềntrongmạng tớitrạmchính.
Mạng cảmbiến (Sensor network)
11
Hệđatáctửtrong kĩthuật
Lướiđiện thông minh
Mộtmôhìnhsảnxuất – phân phốiđiệnnăng: Mỗinút(táctử)tronglướiđiệncónăng
suấtsảnxuất, tiêu thụ,vàtíchtrữđiệnnăng riêng. Khi lượng điệnnăng sảnxuấtvàtiêu
thụtạimộtnútchênhlệch, các nút có thểtruyềnnăng lượng hay tích trữ.Việctíchlũy
hay truyềnnăng lượng đềutốnmộtchiphínhấtđịnh.
⇒
Bài toán tốiưuphântán
12
4
Nội dung và chuẩnđầura họcphần
•Sau khi hoàn thành môn học, sinh viên có thể:
•Mô hình hóa và mô phỏng
•Thiếtkếđiềukhiển
•Phân tích ổnđịnh dựatrênlýthuyếtđiềukhiển
•Nộidung chínhtronghọcphầnnày:
13
Mô hình hóa/ mô phỏng ThiếtkếđiềukhiểnPhântích
Lý thuyếtđồthị
Thuậttoánđồng thuận
Đồng bộhóa đầura
Điềukhiểnđộihình
Phương pháp tiếpcậnchung
•Mô hình hóa:
•Tùy vào mứcđộcụthểmà ta mô hình hóa các
tác tửtheocácmôhìnhkhácnhau.Cáchệđa
tác tửhầunhưđềucócấutrúcphântầng
•Tập trung nhiềuhơnvàosựtương tác giữacác
tác tửtrong hệ
14
Lý thuyết
điềukhiển
Lý thuyết
đồthịTốiưu
hóa
•Phân tích, thiếtkế, đánh giá:
•Mỗihệđatáctửcụthểthường có những
phương án phân tích, thiếtkếđặctrưng
•Nềntảng chung vẫndựatrênnềnlýthuyếtđồ
thị,lýthuyếtđiềukhiển, và tốiưuhóa
“Everything should be made
as simple as possible, but not
simpler” – Albert Einstein
Ví dụ: Điềukhiểnđội hình quadrotor
15
Quadrotor
Formation of quadrotors
BLDC
Ví dụ: Điềukhiểnđội hình quadrotor
16
Tầng điềukhiển
1
: Điềukhiểnđộng cơBLDC
Sơđồđiềukhiểntốcđộ
động cơBLDC
Alin Stirban et. al., “Motion-Sensorless Control of BLDC-PM Motor with Offline FEM-Information-Assisted
Position and Speed Observer”, IEEE Transactions on Industry Applications, Vol. 48, No. 6, 2012.
5
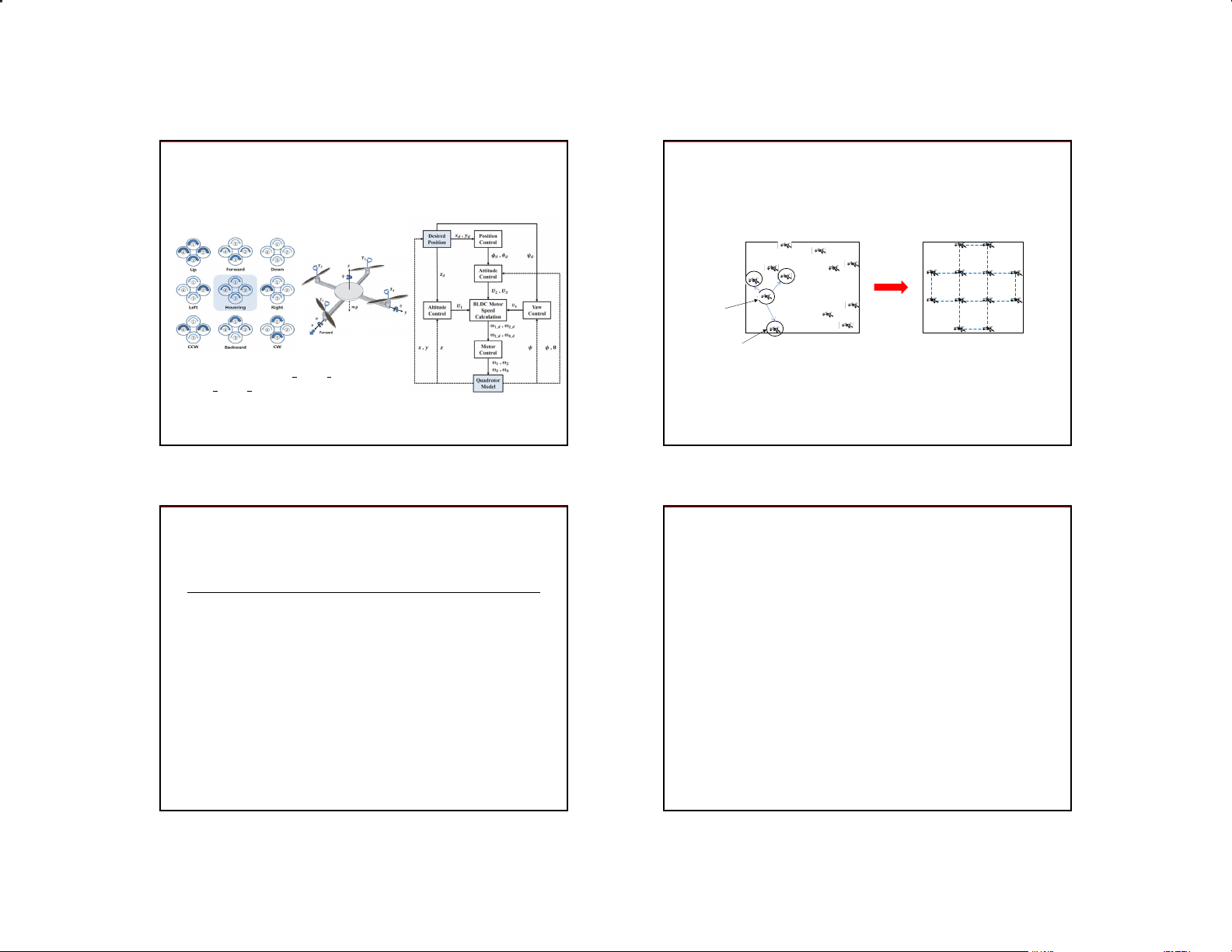
Ví dụ: Điềukhiểnđội hình quadrotor
17
Tầng điềukhiển
2
: Điềukhiển quadrotor
•Sáu biếncầnđiềukhiển(vịtrí theo ba trục
𝑥,𝑦,𝑧
và các góc roll
𝜙
, pitch
𝜃
, yaw
𝜋𝜓𝜋
)
•Bốnbiếnđiềukhiển:
𝑈
,𝑖1, 2, 3, 4
.Sơđồđiềukhiển quadrotor
[2] Young-Cheol Choi, Hyo-Sung Ahn, “Nonlinear Control of Quadrotor for Point Tracking: Actual Implementation and
Experimental Tests”, IEEE/ASME Transactions on Mechatronics, Vol. 20, Issue 3, 2015.
Ví dụ: Điềukhiểnđội hình quadrotor
18
Tầng điềukhiển
3
: Điềukhiểnđộihình
Độihìnhban đầuĐộihìnhmongmuốn
•Biếnđo/điềukhiển/trao đổi: vịtrí tuyệtđối, vịtrí tương đối,
khoảng cách, vector hướng, góc,…
•Cấu trúc thông tin trong hệ
Tác tử
Tác tử
láng giềng
K.-K. Oh, M.-C. Park, H.-S. Ahn (2015), “A survey of multi-agent formation control”. Automatica 53, pp. 424-440.
Mộtsốthuậtngữ
19
Tiếng ViệtTiếng Anh
HệđatáctửMulti-agent systems
Hệthống điềukhiểnnốimạng Networked control system
Tác tửAgent
Tác tửláng giềng Neighbor agent
Đồng thuậnConsensus
Điềukhiểnđộihình Formation control
Lướiđiện thông minh Smart-grid
Mạng cảmbiếnSensor network
UAV Unmanned Aerial Vehicle
UUV Unmanned Underwater Vehicle
Hiệntượng tụbầy, bầyđàn Flocking, swarming
Tài liệuthamkhảo
1. T.Vicsek,A.Czirók,E.Ben-Jacob,I.Cohen,andO.Shochet.“NovelTypeofPhase
Transition in a System of Self-Driven Particles”, Phys. Rev. Lett.75, 1226 – Published
7 Aug 1995
2. S.-M. Kang, M.-C. Park, B.-H. Lee & H.-S. Ahn. Distance-based formation control with
a single moving leader. In: Proc. of American Control Conference. IEEE, 2014. pp.
305-310.
3. Alin Stirban et. al., “Motion-Sensorless Control of BLDC-PM Motor with Offline FEM-
Information-Assisted Position and Speed Observer”, IEEE Transactions on Industry
Applications, Vol. 48, No. 6, 2012.
4. Young-Cheol Choi, Hyo-Sung Ahn, “Nonlinear Control of Quadrotor for Point
Tracking: Actual Implementation and Experimental Tests”, IEEE/ASME Transactions
on Mechatronics, Vol. 20, Issue 3, 2015.
5. K.-K. Oh, M.-C. Park, H.-S. Ahn (2015), “A survey of multi-agent formation control”.
Automatica 53, pp. 424-440.
20

![Bài giảng Cáp mạng, vật tải truyền - GV. Lê Bá Thi [Chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2016/20160409/o0tchya0o/135x160/4531460212639.jpg)


















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)