CHƯƠNG 2: LY HÔÏP.
I. COÂNG DUÏNG, PHAÂN LOAÏI VAØ YEÂU CAÀU (töï ñoïc).
II. AÛNH HÖÔÛNG CUÛA LY HÔÏP ÑEÁN SÖÏ GAØI SOÁ.
1. Khi gaøi soá khoâng taùch ly hôïp.
l
J
B
a
J
m
b
e
a
1
23
4
M
E
A
Jm
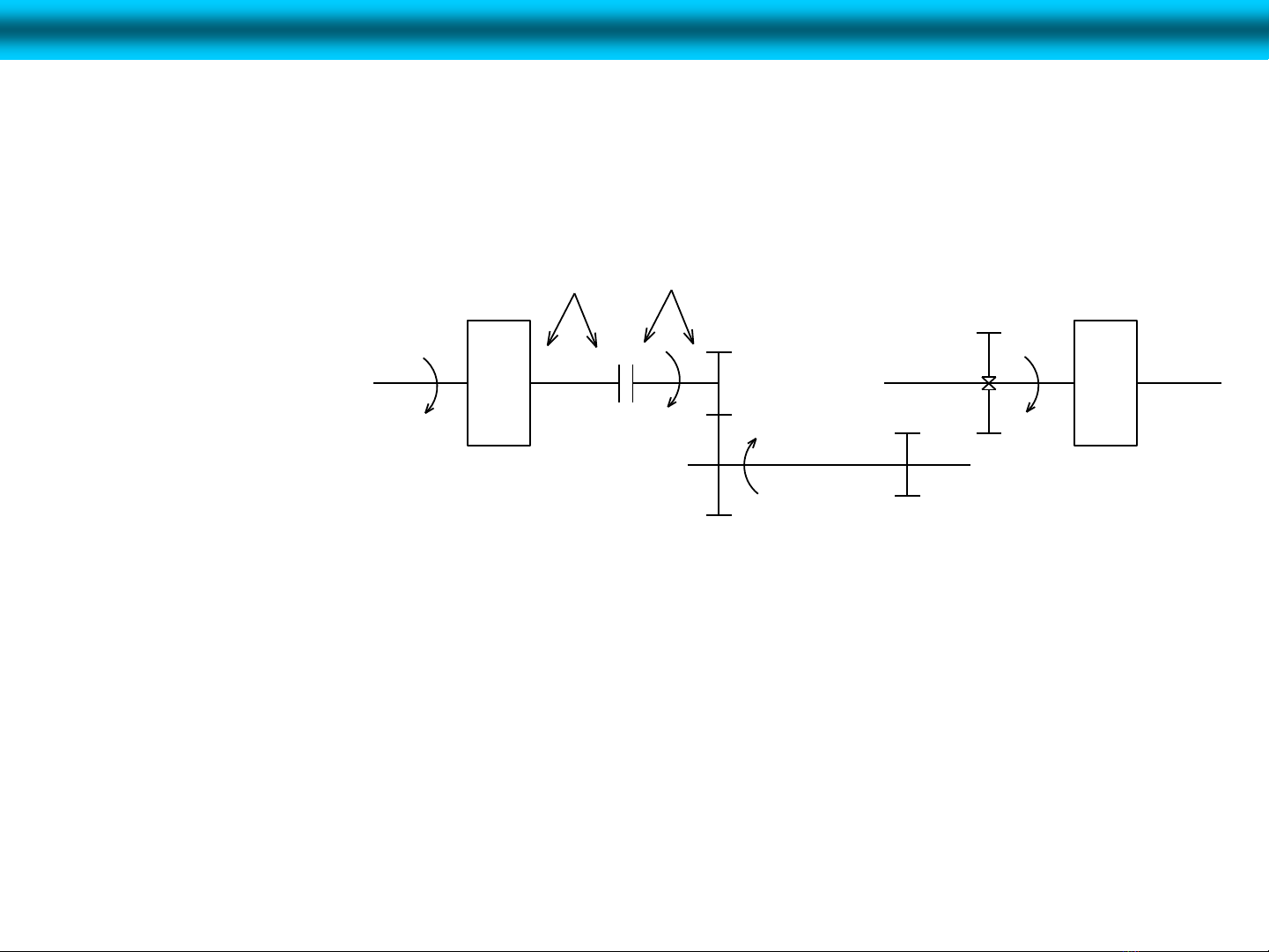
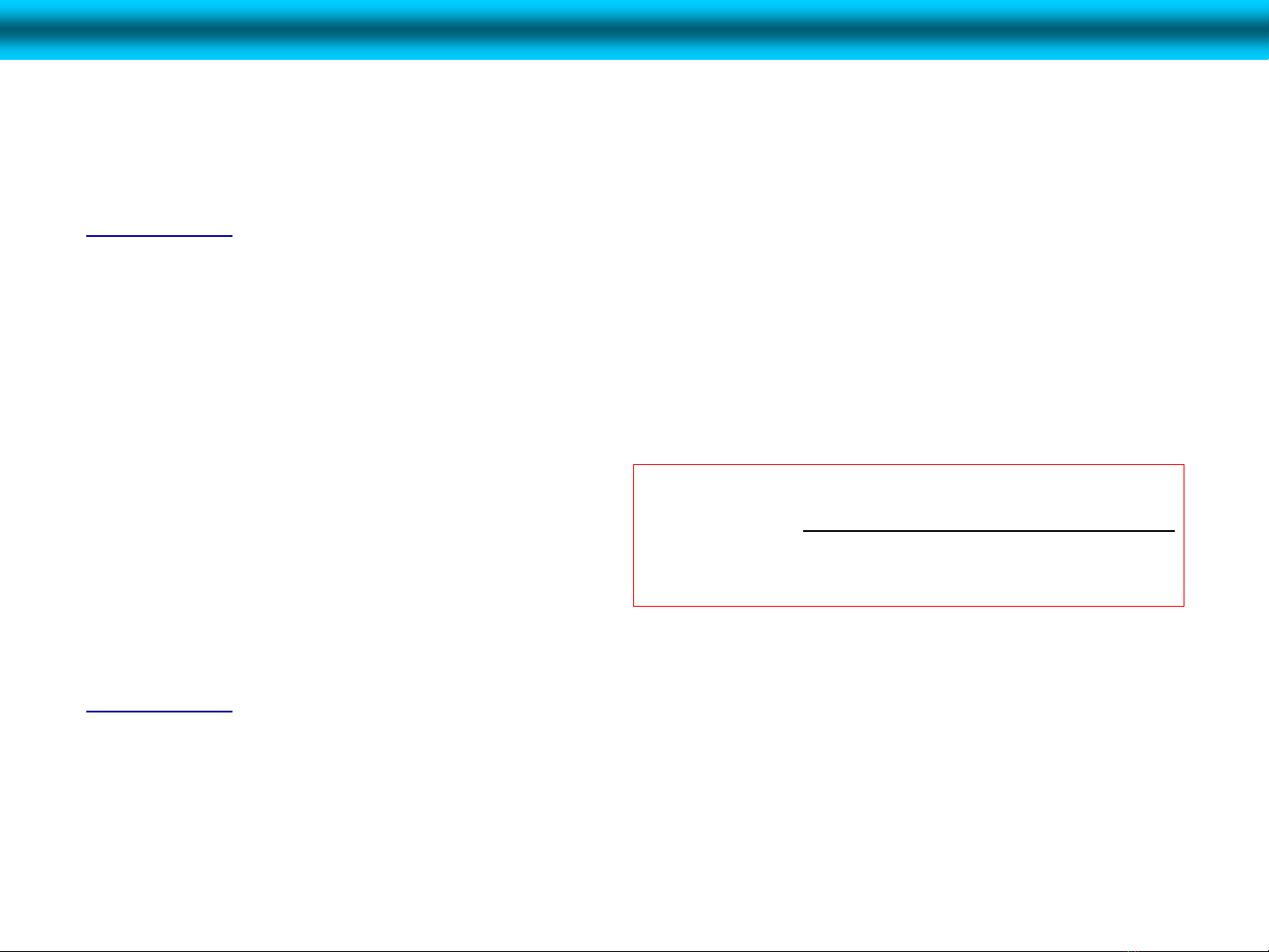
Sô ñoà ñeå xeùt aûnh höôûng cuûa ly hôïp ñeán söï gaøi soá
Jm–Moâmen quaùn tính cuûa caùc chi tieát chuyeån ñoäng cuûa ñoäng cô vaø
cuûa phaàn chuû ñoäng cuûa ly hôïp [Nms2].
Jl–Moâmen quaùn tính cuûa phaàn bò ñoäng cuûa ly hôïp vaø cuûa caùc chi tieát
hoäp soá coù lieân heä ñoäng hoïc vôùi phaàn bò ñoäng cuûa ly hôïp ñöôïc quy daãn veà truïc
cuûa ly hôïp [Nms2].
Ja–Moâmen quaùn tính cuûa baùnh ñaø töôïng tröng ñaët treân truïc thöù caáp
hoäp soá töông ñöông vôùi troïng khoái chuyeån ñoäng tònh tieán cuûa xe [Nms2] .
CHƯƠNG 2: LY HÔÏP.
II. AÛNH HÖÔÛNG CUÛA LY HÔÏP ÑEÁN SÖÏ GAØI SOÁ.
1. Khi gaøi soá khoâng taùch ly hôïp.
Khi gaøi BR3 vaøo BR4.
Phöông trình moment xung löôïng cho chuyeån ñoäng quay cuûa truïc A:
P4–Löïc taùc duïng leân raêng cuûa baùnh raêng 4 trong thôøi gian gaøi soá
r4–Baùn kính voøng troøn laên cuûa baùnh raêng 4
t –Thôøi gian löïc P4taùc duïng,trong thôøi gian ñoù truïc A thay ñoåi vaän toác goùc töø
añeán ’a
a–Toác ñoä goùc cuûa truïc A tröôùc khi gaøi soá
’a–Toác ñoä goùc cuûa truïc A sau khi gaøi soá
Phöông trình moâ men xung löôïng cho truïc trung gian E :
eee
JtrP '... 33
ee
2
1
2
lm33 '
r
r
JJtrP
=>
aaa
JtrP
... 44
(1)
CHƯƠNG 2: LY HÔÏP.
II. AÛNH HÖÔÛNG CUÛA LY HÔÏP ÑEÁN SÖÏ GAØI SOÁ.
1. Khi gaøi soá khoâng taùch ly hôïp.
=>
P3, P4taùc duïng giöõa caùc raêng laø baèng nhau vaø thôøi gian gaøi soá t laø chung.
Tyû soá truyeàn cuûa hoäp soá ihlaø:
3
4
1
2
hr
r
r
r
i
3
4
2
1
2
1
2
33 .... r
r
r
r
r
r
JJtrP ablm
(2)
Nhaân hai veá phöông trình (2) vôùi
3
4
r
r
3
4
3
4
a
2
1
b
2
1
2
lm
3
4
33 r
r
.
r
r
r
r
.
r
r
.JJ
r
r
t.r.P
=>
2
halmhblm43 i..JJi..JJt.r.P
(3)
CHƯƠNG 2: LY HÔÏP.
II. AÛNH HÖÔÛNG CUÛA LY HÔÏP ÑEÁN SÖÏ GAØI SOÁ.
1. Khi gaøi soá khoâng taùch ly hôïp.
Vì P3= P4cho neân P3.r4.t = P4.r4.t
2
halmhblmaaa .iω.JJ.iω.JJωωJ
Töø phöông trình (1) vaø (3) ta coù:
a
2
hlm
aahblm
aJi.JJ
.Ji..JJ
=>
Thay giaù trò a’vaøo (1) ta coù
:
a
a
2
hlm
aahblm
a44 Ji.JJ
.Ji..JJ
Jt.r.P
a
2
hlm
habhlma
44 Ji.JJ
i.i.JJJ
t.r.P
=>
lm
a
h
habha
JJ
J
i
iiJ
trP
2
44
..
..
(5)
(4)
CHƯƠNG 2: LY HÔÏP.
II. AÛNH HÖÔÛNG CUÛA LY HÔÏP ÑEÁN SÖÏ GAØI SOÁ.
1. Khi gaøi soá khoâng taùch ly hôïp.
Theo phöông trình (5) ta thaáy löïc xung kích taùc duïng leân caëp baùnh raêng khi
gaøi soá phuï thuoäc vaøo toång soá moâmen quaùn tính (Jm+ Jl).
Vì moâmen quaùn tính Jmlôùn hôn Jlraát nhieàu, neân khi ly hôïp taùch trong quaù
trình gaøi soá thì löïc P4seõ giaûm raát nhieàu.
2. Khi gaøi soá coù taùch ly hôïp (Jm=0).
Phöông trình (4) luùc naøy seõ nhö sau:
a
h
l
habhla
JiJ
iiJJ
trP
2
44 .
....
..
P’4- löïc taùc duïng leân caëp baùnh raêng ñöôïc gaøi khi taùch ly hôïp.
Löïc P’4phuï thuoäc moâmen quaùn tính Jl.
Ñeå cho P’4giaûm, caàn phaûi giaûm Jl, bôûi vaäy khi thieát keá ly hôïp caàn phaûi
giaûm moâmen quaùn tính phaàn bò ñoäng xuoáng möùc nhoû nhaát coù theå ñöôïc.
Nhaän xeùt:
Nhaän xeùt:
(6)
![Bài giảng cấu tạo ô tô [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260424/vispacex_27/135x160/511777450048.jpg)










![Giáo trình Kỹ thuật chung về ô tô (Nghề: Công nghệ ô tô) - Trường Cao đẳng Bách Khoa Tây Nguyên [Mới Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/39771779074470.jpg)
![Giáo trình Kỹ thuật chung về ô tô và công nghệ sửa chữa (Nghề: Công nghệ ô tô) - Trường Cao đẳng Bách Khoa Tây Nguyên [Mới Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/23311779074471.jpg)



![Giáo trình Hệ thống nhiên liệu động cơ ô tô (CĐ) - Trường Cao đẳng Công nghiệp Thanh Hóa [Ngành Công nghệ ô tô]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/hoatrami2026/135x160/37511778728704.jpg)
![Giáo trình Hệ thống phanh ABS Công nghệ ô tô (CĐ) - Trường Cao đẳng Công nghiệp Thanh Hóa [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/hoatrami2026/135x160/1901778728704.jpg)





![Giáo trình Hệ thống điện thân xe ô tô (CĐ) - Trường Cao đẳng Công nghiệp Thanh Hóa [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/hoatrami2026/135x160/611778728708.jpg)


%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)