
TP CHÍ PHÁT TRIN KH&CN, TP 13, S K5 - 2010
Bn quyn thuc ĐHQG-HCM Trang 5
ĐIU KHIN TELE-MANIPULATOR
T Dip Công Thành
Trưng Đi hc Bách Khoa, ĐHQG-HCM
(Bài nhn ngày 01 tháng 06 năm 2010, hoàn chnh sa cha ngày 27 tháng 10 năm 2010
)
TÓM TT: Hin nay trên th gii, hu ht các vn ñ tương tác gia con ngưi và các môi
trưng nguy him, ñc hi, lây nhim hoc vô trùng ñu ñưc gii quyt bng k thut robot. Trong ñó,
mt trong nhng gii pháp mang tính kh thi, n ñnh và trc quan nht là k thut Tele-Manipulator.
Bng cách s dng tay máy tương t ñ ghi nhn các chuyn ñng và hành vi ca ngưi ñiu khin
trong môi trưng an toàn, sau ñó truyn các thông s này qua mng LAN cho tay máy chính thc hin
ñúng theo hành vi ca ngưi ñiu khin trong môi trưng ñc hi và nguy him hoc vô trùng là hưng
nghiên cu ñ xut trong bài báo này.
T khoá: Tele-Manipulator, mng LAN, ñiu khin.
1.GII THIU
Tele-Manipulator (TM) là h thng ñưc
ñiu khin t xa gm 2 cánh tay máy: master và
slave. Tay máy slave s ñưc ñiu khin ñ thc
hin các chuyn ñng ging ht như tay máy
master. Đ thc hin ñiu khin này, tay máy
master s ñưc con ngưi ñiu khin. Các
chuyn ñng mong mun ca con ngưi s
ñưc tay máy master ghi nhn bng các cm
bin ño góc chuyn ñng. Và các giá tr này s
ñưc truyn qua vi mch ñin t ghi nhn, x lý
và gi ñn b ñiu khin tay máy slave.
Tay máy slave hay còn gi là tay máy thc
thi thc hin các chuyn ñng theo cánh tay
master. S chuyn ñng này thc hin tc thi
da vào các giá tr chuyn ñng mà tay máy
master ghi nhn ñưc. Thông thưng các giá tr
này ñưc truyn qua t xa bng nhiu phương
pháp khác nhau như: mng Lan, internet, sóng
vô tuyn v.v...nên toàn b h thng tay máy và
ñiu khin ñưc gi là Tele-Manipulator.
Năm 1898, Nikola Tesla ñã ñưa ra mô hình
thuyn ñiu khin bng sóng radio ñu tiên
NewYork thì ñn nay TM ñã có lch s phát
trin hơn mt th k [1]. H thng TM thc s
ñu tiên dng master - slave ñưc ch to là mt
cơ cu thun cơ khí ñưc R.Goertz phát thin
vào cui năm 1940 ti Phòng thí nghim quc
gia Argone [2]. Năm 1954, R.Goertz phát trin
h thng thao tác ñin cơ ñu tiên vi b ñiu
khin servo. Vi s phát trin ca k thut ngày
càng hin ñi thì h thng TM xut hin trong
nhiu lĩnh vc ph"c v" hiu qu nhiu cho con
ngưi như: tay máy ph#u thut t xa trong y t
[3], cánh tay dò tìm cht n$ trong quc phòng,
tay máy trên các tàu thám him, chinh ph"c
không gian [4], tay máy g%p cht ñt ht nhân
trong công nghip ñin nguyên t, tay máy trên
các tàu l&n nghiên cu ñáy bin [5], v.v…
Đ thc thi ñiu khin TM cũng như kh
năng giám sát và ñáp ng thi gian thc, mt s
nghiên cu liên quan ñn thut toán và mô hình
Science & Technology Development, Vol 13, No.K5- 2010
Trang 6 Bn quyn thuc ĐHQG.HCM
ñiu khin h thng ñưc trình bày như: ñiu
khin thích nghi s d"ng thut toán ñiu khin
trưt ñưc trình bày bi Platon [6], k thut
gim thi gian truyn qua mng trong ñiu
khin TM ñưc ñ ngh bi Lee [7], Sano ñ
xut k thut bù thi gian tr( trong ñiu khin
TM [8], Towhidkhah vi mô hình hoá và ñiu
khin tuyên ñoán [9], và ñiu khin trơ vi s
tr( ng#u nhiên ca thi gian ñưc ñ xut bi
Prokopiou [10], v.v…
Trong phm vi gii hn ca bài báo, thut
toán t thay ñ$i h thng ñiu khin PID theo
hưng tính toán ca mng thn kinh nhân to
ñưc ñ xut ñ ñiu khin tay máy 3 bc t do
thông qua mng LAN. Kt qu ñt ñưc t mô
hình h thng Tele-Manipulator và thc thi ñiu
khin s ñưc trình bày thông qua thc nghim
ñiu khin h thng.
2.XÂY DNG MÔ HÌNH H THNG
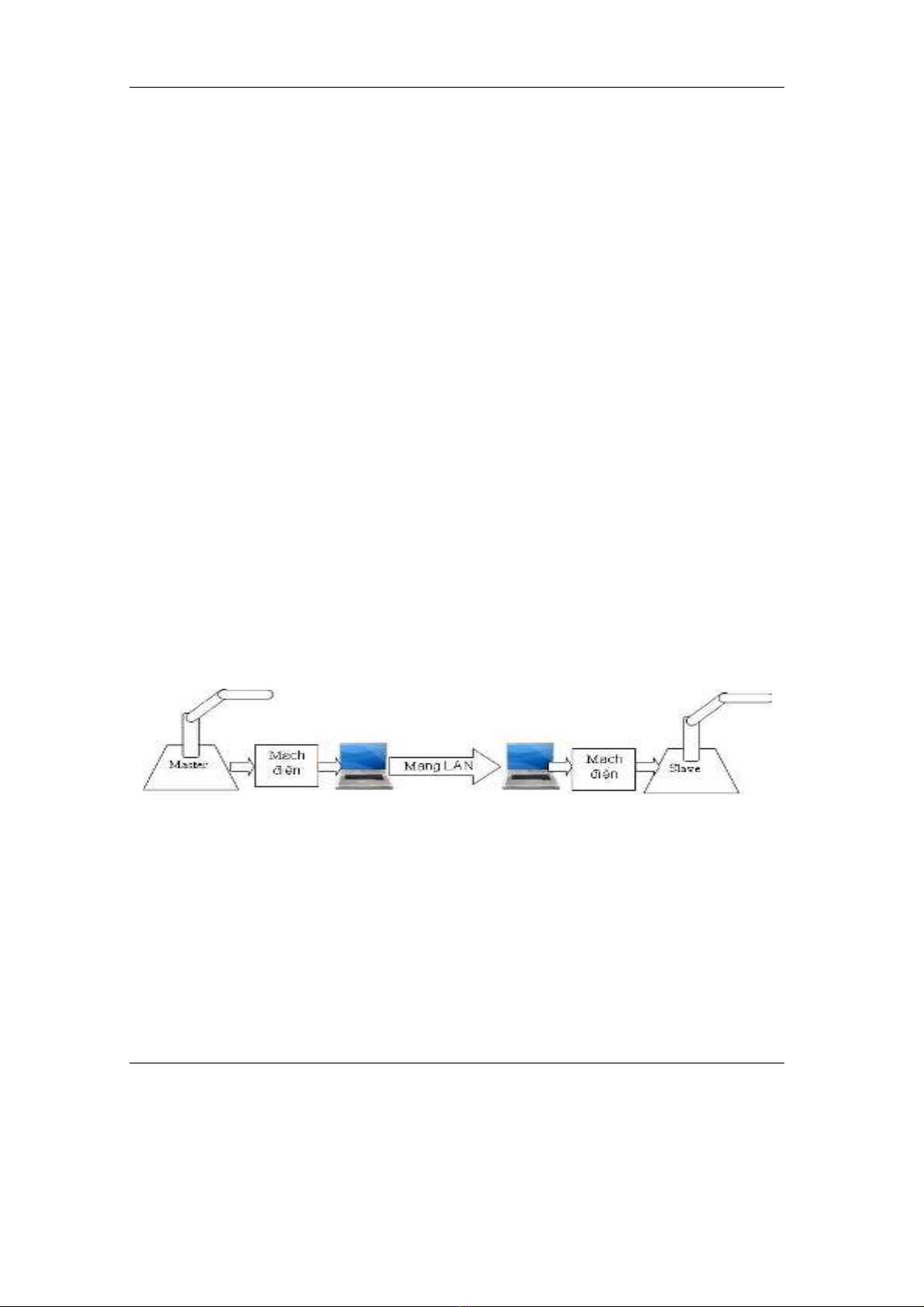
H thng ñiu khin t$ng quan ñưc trình
bày trên hình 1. H thng bao gm tay máy
master ñưc ñiu khin bi con ngưi và tay
máy slave thc thi các chuyn ñng b%t chưc
theo tay máy master. Các thông s v chuyn
ñng ca tay máy master ñưc ghi nhn bi các
encoder (Omron E6C-CWZ1C 1000R/P) và gi
ñn máy tính 1 (Pentum IV 2.4 Ghz) thông qua
các mch vi x lý h) tr (DSPIC-2010). Máy
tính 1 truyn các thông tin này qua mng LAN
ñn máy tính 2 (Pentum IV 2.4 Ghz). Sau ñó
máy tính 2 thc hin các gii thut ñiu khin
cn thit ñ ñiu khin hành vi ca tay máy
slave s d"ng ñng cơ DC (Hitachi DC Motor
24VDC, hp gim tc 15 ln, ñĩa xung
100xung/vòng) sao cho ñáp ng ñúng vi các
yêu cu t tay máy master. Các mch ñin h)
tr và ñiu khin ñưc thc hin và s d"ng vi
ñiu khin DSPIC-2010. Phn mm ñiu khin
và truyn thông qua mng LAN ñưc thc hin
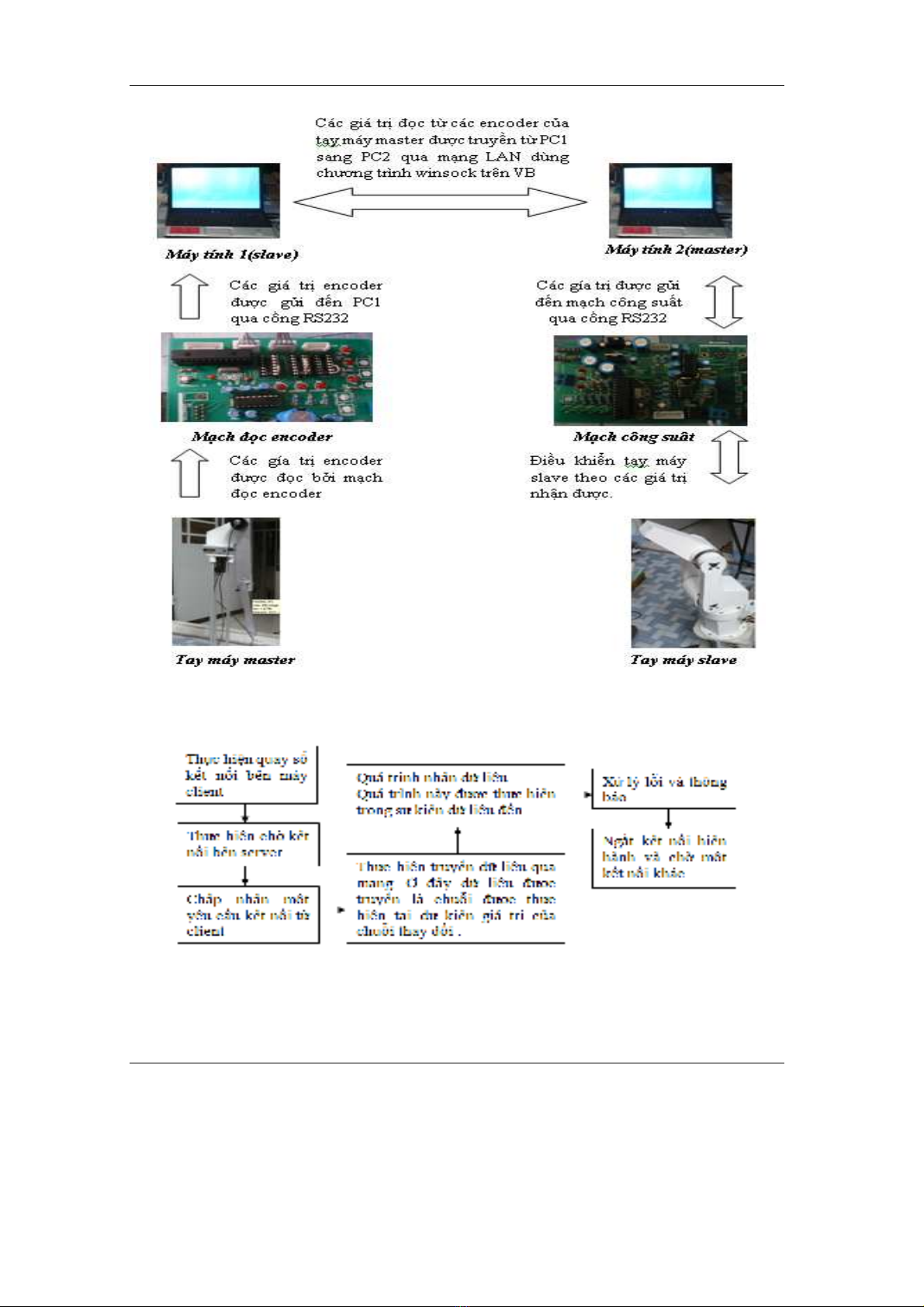
trên nn phn mm Visual Basic. Sơ ñ khi
ca h thng ñưc trình bày trên hình 2.
Hình 1. Sơ ñ nguyên lý h thng
TP CHÍ PHÁT TRIN KH&CN, TP 13, S K5 - 2010
Bn quyn thuc ĐHQG-HCM Trang 7
Hình 2. Sơ ñ khi h thng
Hình 3. Qui trình truyn nhn và kt ni gi*a 2PC
Science & Technology Development, Vol 13, No.K5- 2010
Trang 8 Bn quyn thuc ĐHQG.HCM
3.ĐIU KHIN H THNG
3.1.Nghi thc giao tip truyn nhn qua
mng LAN
Phn mm ñiu khin và truyn nhn qua
mng LAN ñưc xây dng trên nn Visual
Basic. Đ truyn nhn qua mng LAN,
Winsock Control ñưc ñi kèm vi Visual Basic
dùng ñ phát trin các ng d"ng cho phép truy
xut các chc năng TCP/IP. Winsock là mt
chu+n ñã ñưc trin khai bi Microsoft da trên
mt tp tin th t"c truyn d* liu trên TCP/IP.
Các th t"c này nm trong các thư vin liên kt
ñng (DLL) và chy trên Windows. Chúng ta s
to ra hai chương trình mt client và mt
server, hai chương trình này s tương tác vi
nhau ñ truyn d* liu qua li. Client s gi yêu
cu lên server, server s ly d* liu t Database
và tr d* liu v cho client. Đ kt ni và truyn
d* liu qua mng LAN, trưc tiên phi ñu
ch,nh các thông s ca windows và ñ&t hai máy
tính cùng mt workgroup, ñiu ch,nh IP tĩnh
cho hai máy, sau khi kim tra hai máy ñã kt
ni, tin hành chy chương trình. Qui trình
truyn nhn, kt ni gi*a 2PC ñưc trình bày
trên hình 3.
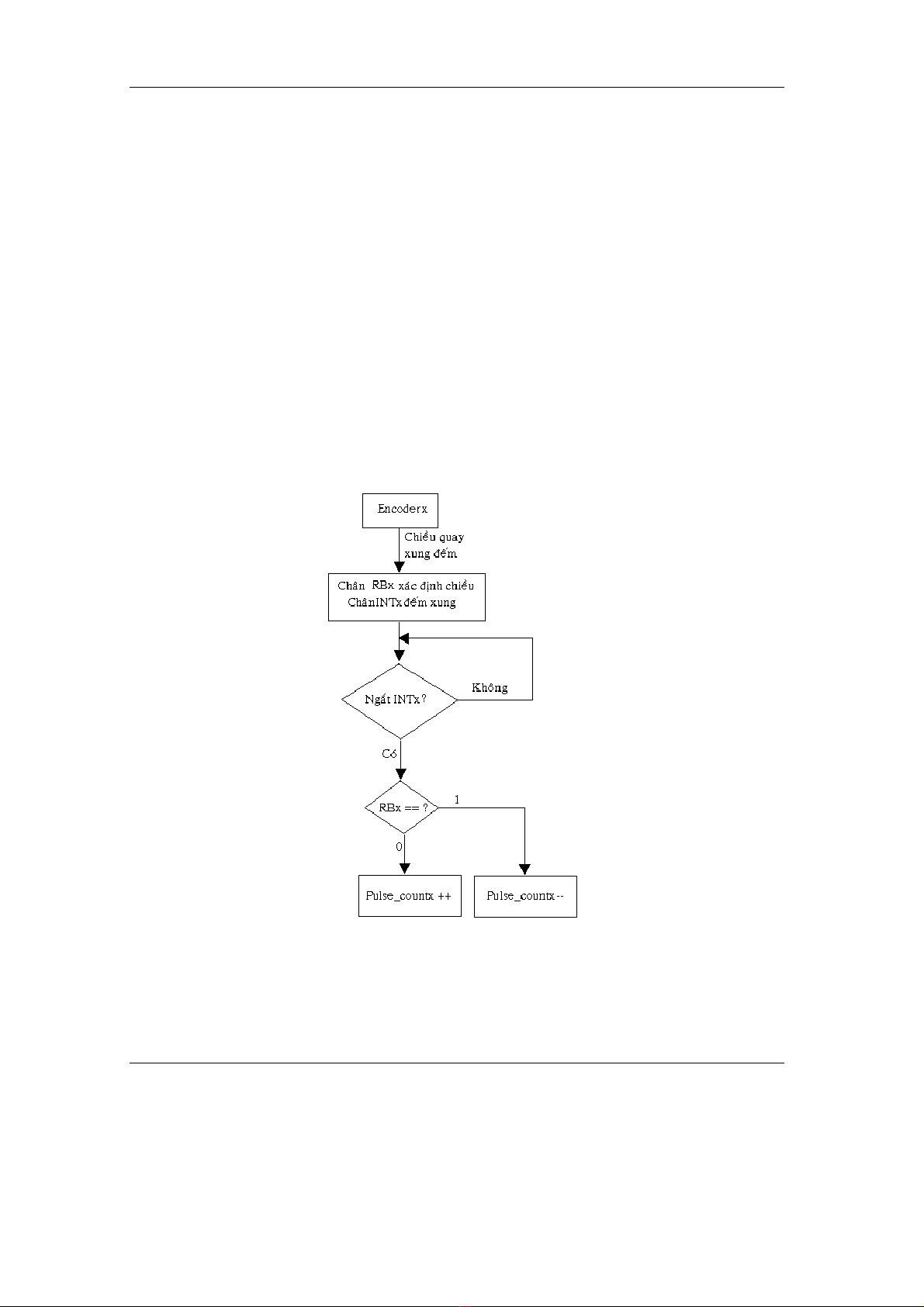
Hình 4. Lưu ñ gii thut ñc encoder
TP CHÍ PHÁT TRIN KH&CN, TP 13, S K5 - 2010
Bn quyn thuc ĐHQG-HCM Trang 9
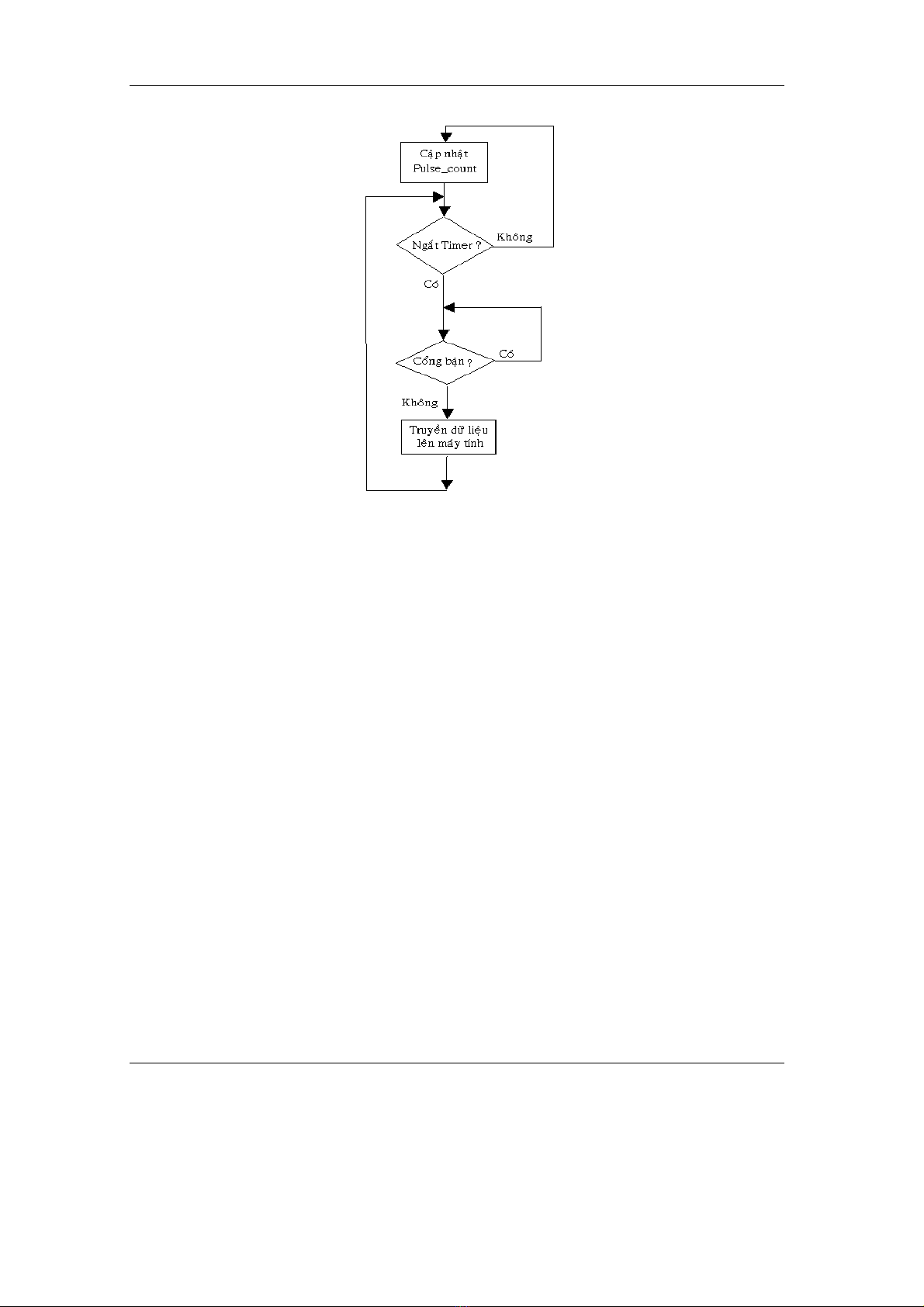
Hình 5. Lưu ñ gii thut truyn nhn d* liu t vi ñiu khin lên máy tính th nht
3.2.Lưu ñ gii thut ñiu khin
Sau khi ñã kt ni thành công 2 máy tính,
chương trình thc hin quá trình ñiu khin như
sau:
• Mch ñc encoder thc hin ñc giá tr
v trí các góc ca tay máy master. Lưu ñ gii
thut ñc encoder ñưc trình bày trên hình 4
• Thc hin gi giá tr encoder v máy
tính th nht thông qua chu+n giao tip RS232
và lưu ñ truyn nhn ñưc trình bày trên hình
5.
• Máy tính th nht thc hin gi giá tr
encoder cho máy tính th 2
• Máy tính th 2 thc hin gi giá tr
encoder xung vi ñiu khin PIC ñ ñiu khin
tay máy slave. Quy trình tương t như gi/nhn
d* liu t vi ñiu khin v máy tính th 1.
• PIC thc hin tính toán gii thut ñiu
khin PID theo hưng tính toán ca mng thn
kinh nhân to và xut giá tr ñiu khin theo
dng PWM ñ ñiu khin ñng cơ. Lưu ñ gii
thut ñiu khin ñng cơ ca tay máy slave
ñưc trình bày trên hình 6.
• Cp nht giá tr góc tay máy slave và gi
v máy tính th 2
• Máy tính th 2 gi v trí tay máy slave
cho máy tính s 1 và hin th lên ñ th

























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)