Thiết kế bộ điều khiển PID
Thiết Kế Bộ Điều Khiển PID
Ziegler và Nichols đưa ra hai phương pháp thực nghiệm để xác định tham số bộ điều
khiển PID.Phương pháp thứ nhất dùng mô hình xấp xỉ quán tính bậc nhất có trễ của đối
tượng điều khiển:
( ) 1
delay
T s
ke
G s Ts
(1)
Phương pháp thứ hai không cần đến mô hình toán học của đối tượng nhưng chỉ áp dụng
cho một số lớp đối tượng nhất định.
1. Phương pháp Zieger-Nichols thứ nhất:
Phương pháp này nhằm xác định các tham số
, ,
P I D
K K K
cho bộ điều khiển PID trên cơ
sở xấp xỉ hàm truyền đạt thành khâu quán tính bậc nhất (1) để hệ kín nhanh chóng về chế
độ xác lập và độ quá điều chỉnh không quá 40%
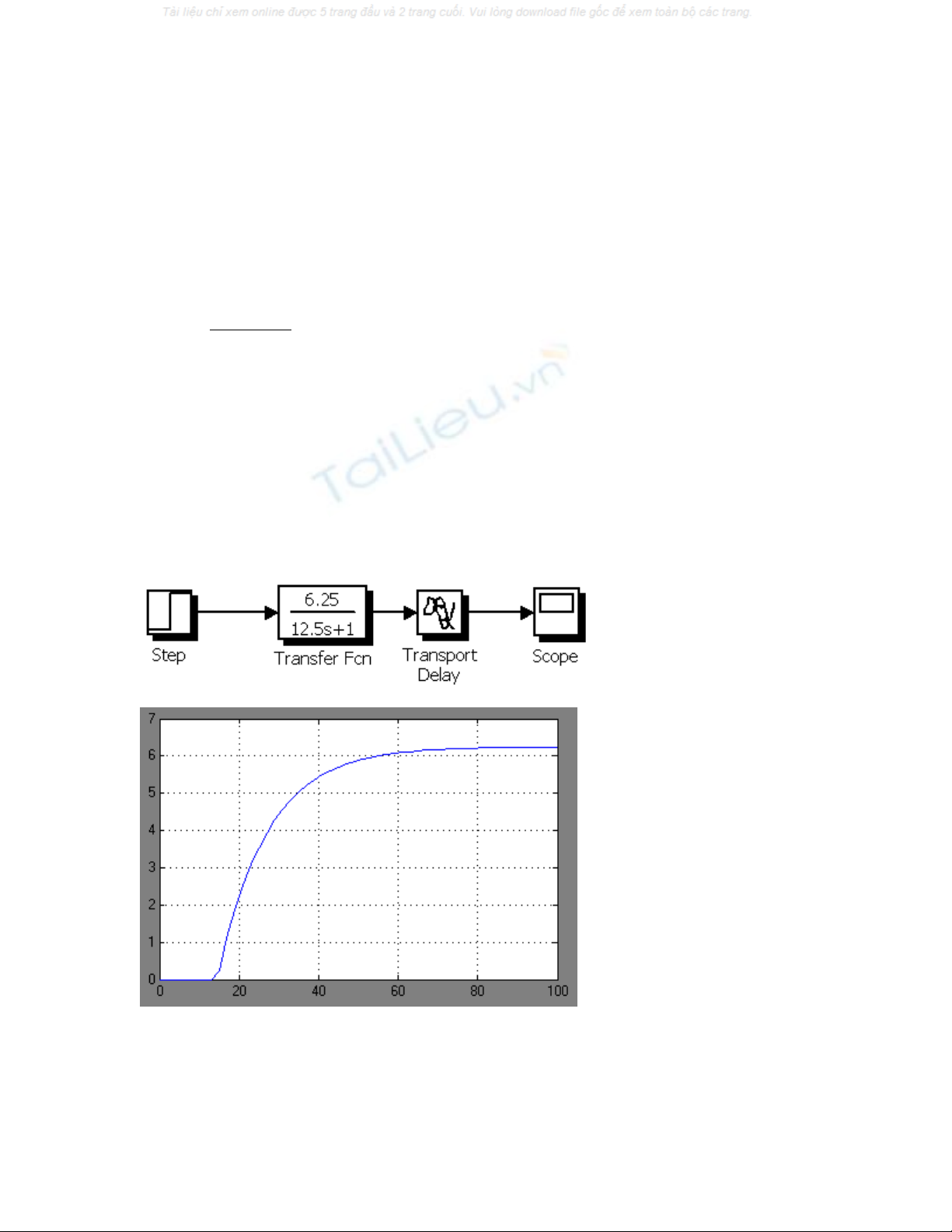
Đặc tính động học:
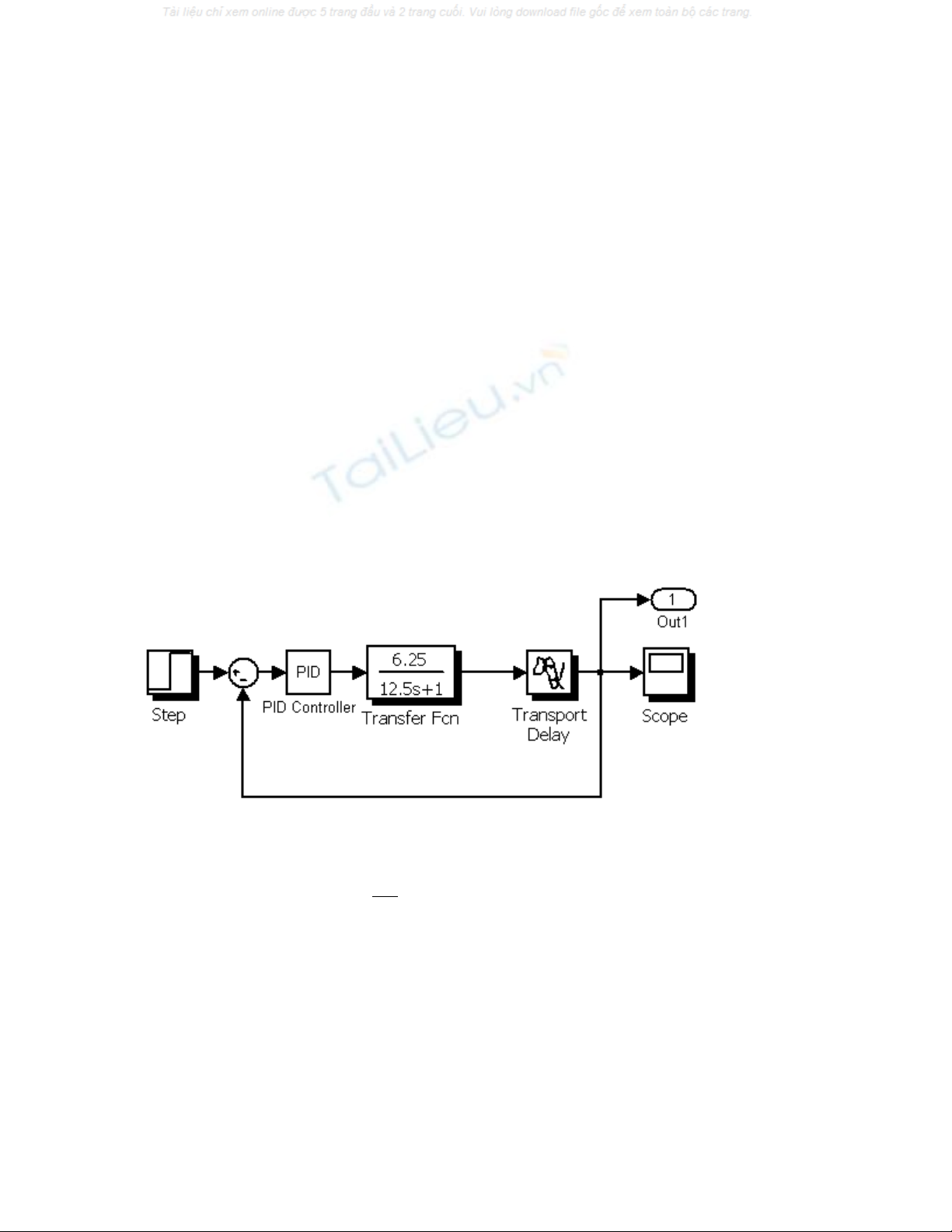
Ở đây ta đã mô phỏng với giả thiết xấp xỉ hàm truyền của hệ thống là:
Lưu Như Hòa – ĐKTĐ – KSTN – K50 1
Thiết kế bộ điều khiển PID
13.5
6.25
( ) 12.5 1
s
G s e
s
(Trên thực tế các thông số
, ,
delay
T T k
được xác định từ đặc tính động học của hệ hở)
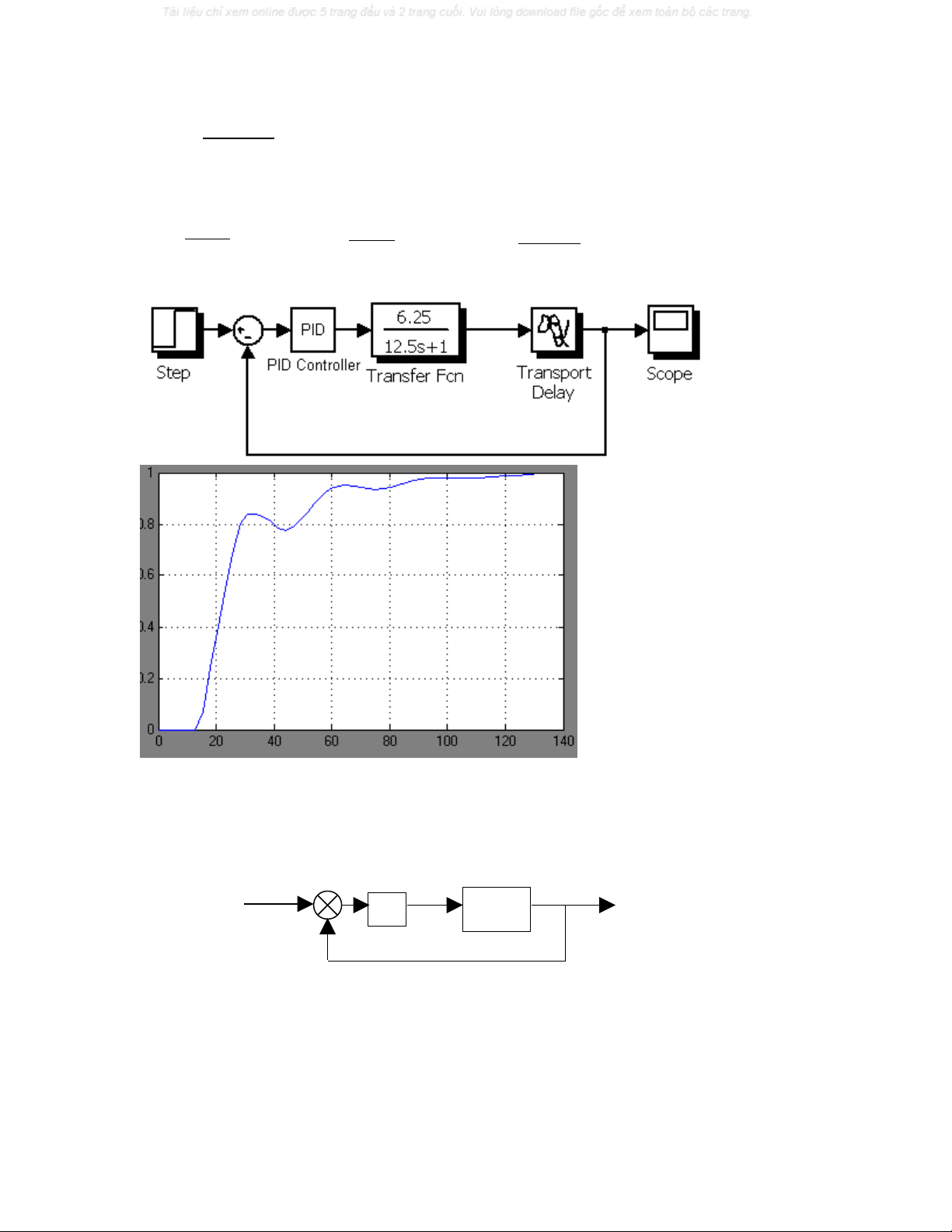
Nếu chọn các tham số cho bộ điều khiển PID theo phương pháp Z-N -1 thì ta có:
0.1481
P
delay
T
KkT
,
0.0055
2
p
I
delay
K
KT
,
.1
2
delay p
D
T K
K
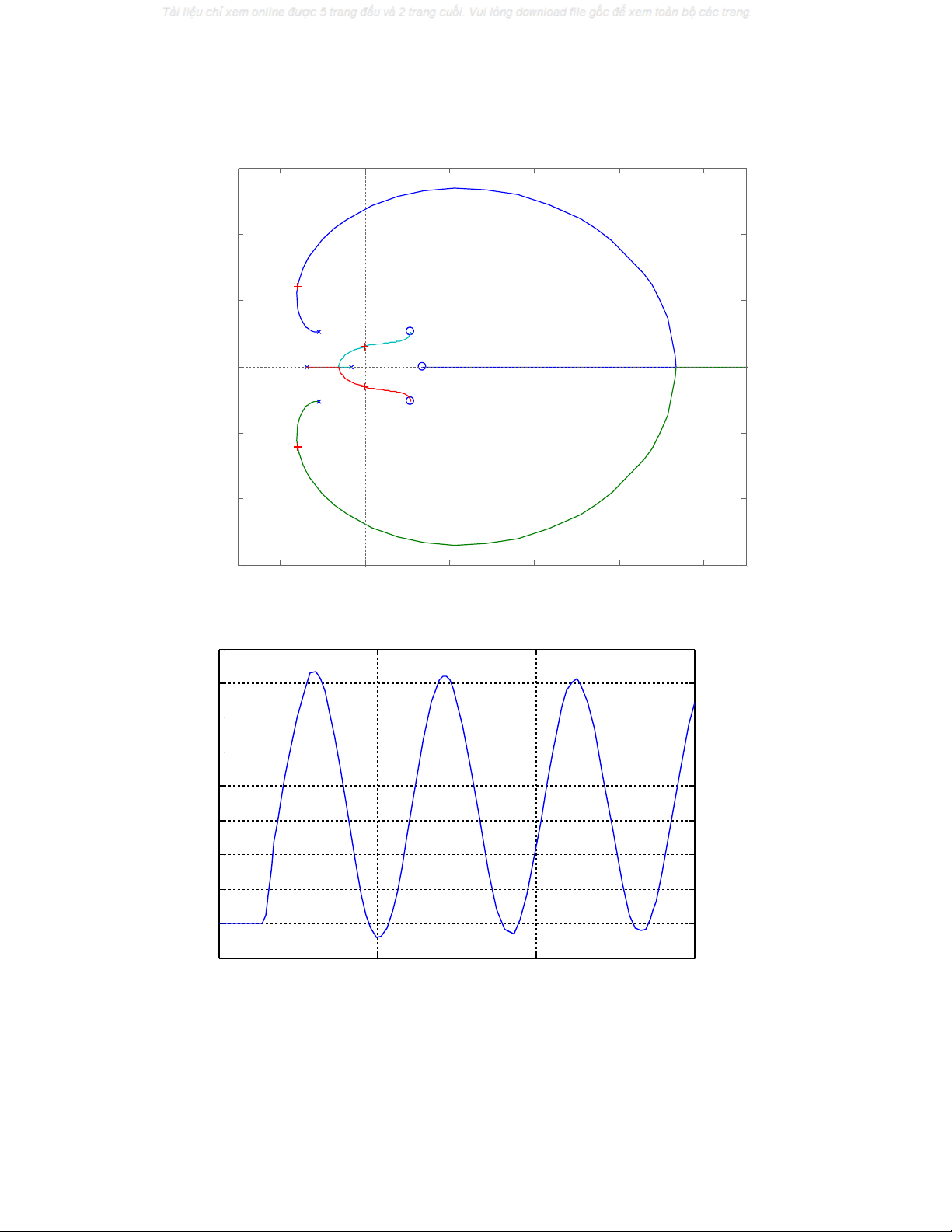
2. Phương pháp Zieger-Nichols thứ hai:
Phương pháp Zieger-Nichols thứ hai
Phương pháp này thay bộ điều khiển PID trong hệ kín bằng bộ khuyếch đại,sau đó tăng k
cho đến khi hệ nằm ở biên giới ổn định tức là hệ kín trở thành khâu dao động điều
hòa.Lúc đó ta có Kgh và chu kỳ của dao động đó là Tgh.Tham số cho bộ điều khiển PID
chọn theo bảng sau:
Lưu Như Hòa – ĐKTĐ – KSTN – K50 2
G s
k
( )
ty
( )
t1
_
Thiết kế bộ điều khiển PID
>> [num_delay,den_delay]=pade(13.5,3);
>> sys=tf(6.25,[12.5 1])*tf(num_delay,den_delay)
Transfer function:
-6.25 s^3 + 5.556 s^2 - 2.058 s + 0.3048
-----------------------------------------------------
12.5 s^4 + 12.11 s^3 + 5.004 s^2 + 0.9389 s + 0.04877
>> rlocus(sys);
>> [k,p]=rlocfind(sys)
Select a point in the graphics window
selected_point =
0.0000 + 0.1521i
k =
0.3438
p =
-0.3985 + 0.6092i
-0.3985 - 0.6092i
-0.0000 + 0.1523i
-0.0000 - 0.1523i
Lưu Như Hòa – ĐKTĐ – KSTN – K50
Bộ điều
khiển
Kp Ti Td
P 0,5*Kgh ∞ 0
PI 0,45* Kgh
1*
1.2 Tgh
0
PID 0,6*Kgh 0,5*Tgh 0,125*Tgh
3
Thiết kế bộ điều khiển PID
-0.5 0 0.5 1 1.5 2
-1.5
-1
-0.5
0
0.5
1
1.5 Root Locus
Real Axis
Imaginary Axis
0 50 100 150
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Lưu Như Hòa – ĐKTĐ – KSTN – K50 4
Thiết kế bộ điều khiển PID
>>[Gm,Pm,Wg,Wp] = margin(k*sys)
Gm =
1.0006
Pm =
0.1256
Wg =
0.1523
Wp =
0.1521
>> Tgh=2*pi/Wg
Tgh =
41.2662
Chọn tham số cho bộ điều khiển PID ta có:
0.6* 0.2063
p
K Kgh
,
0.01
P
I
I
K
KT
,
1.0640
D p D
K K T
Lưu Như Hòa – ĐKTĐ – KSTN – K50 5
























![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)